有效行驶区域的快速确定方法、装置及电子设备、存储介质与流程
本申请涉及自动驾驶,尤其涉及一种有效行驶区域的快速确定方法、装置及电子设备、存储介质。
背景技术:
1、确定有效行驶区域,就是要判断自动驾驶车辆周围可以行驶,即可以进行规划和控制的区域。有效行驶区域的确定是自动驾驶领域的重要感知算法之一,对辅助驾驶或者自动驾驶的行车安全起到至关重要的作用。
2、相关技术中,通常会直接采用高精地图中复杂的多边形框计算道路或非道路区域。然而在车辆连续转弯、复杂路口或者停车场等场景中,整个计算的耗时会急剧增加,影响自动驾驶系统的稳定性。如何降低耗时,快速确定有效行驶区域,是实际业务需求中有待解决的问题。
技术实现思路
1、本申请实施例提供了有效行驶区域的快速确定方法、装置及电子设备、存储介质,以提供快速的有效行驶区域的确定过程,实现自动驾驶感知模块的高效、稳定。
2、本申请实施例采用下述技术方案:
3、第一方面,本申请实施例提供一种有效行驶区域的快速确定方法,其中,所述方法包括:
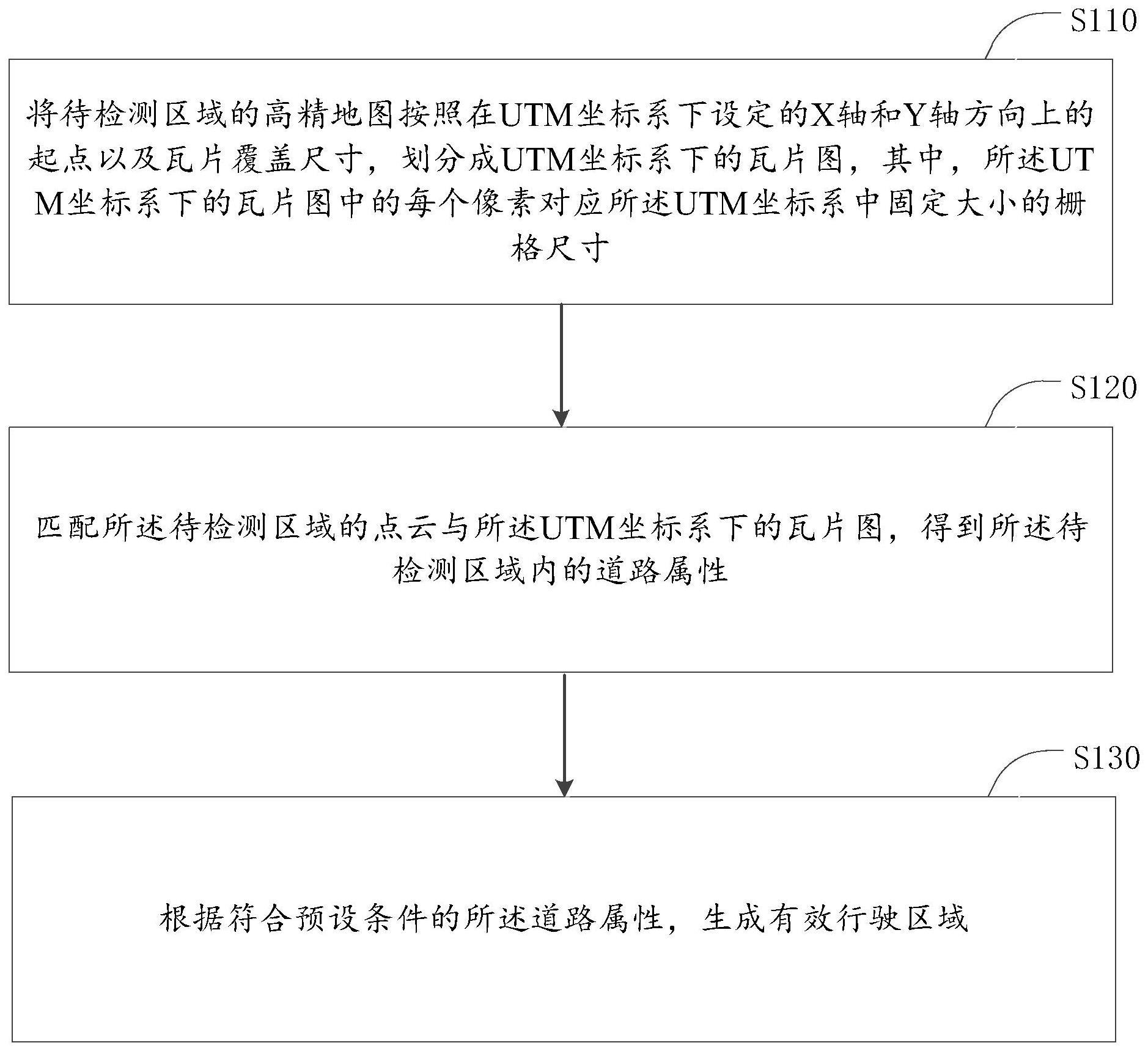
4、将待检测区域的高精地图按照在utm坐标系下设定的x轴和y轴方向上的起点以及瓦片覆盖尺寸,划分成utm坐标系下的瓦片图,其中,所述utm坐标系下的瓦片图中的每个像素对应所述utm坐标系中固定大小的栅格尺寸;
5、匹配所述待检测区域的点云与所述utm坐标系下的瓦片图,得到所述待检测区域内的道路属性;
6、根据符合预设条件的所述道路属性,生成有效行驶区域。
7、在一些实施例中,所述瓦片图包括瓦片id,所述为瓦片id为所述瓦片图的文件名,所述匹配所述待检测区域的点云与所述utm坐标系下的瓦片图,得到所述待检测区域内的道路属性,包括:
8、确定所述待检测区域的点云在utm坐标系下的位置点;
9、将utm坐标系下的位置点转换为所述瓦片id和瓦片图中的行列号;
10、根据所述瓦片id和所述瓦片图中的行列号,以确定所述待检测区域内的道路属性。
11、在一些实施例中,所述确定所述待检测区域内的道路属性包括:
12、所述瓦片图包括瓦片id,所述为瓦片id为所述瓦片图的文件名,所述匹配所述待检测区域的点云与所述utm坐标系下的瓦片图,得到所述待检测区域内的道路属性,包括:
13、根据所述瓦片图中的行列号,确定所述待检测区域的点云的道路属性是否属于道路,其中,所述点云包括激光雷达原始的点云和/或原始点云降采样后的点云或者栅格;
14、如果不属于道路,则将该帧中对应的原始点云或者栅格作为背景进行删除;
15、如果属于道路,则将该帧中对应的原始点云或者栅格按照道路保存。
16、在一些实施例中,所述确定所述待检测区域内的道路属性包括:
17、根据所述瓦片图中的行数和列数,确定所述待检测区域的点云的道路属性是否属于道路,其中,所述点云包括道路的栅格点云和/或道路的点;
18、如果不属于道路,则将该道路的栅格点云和/或道路的点作为背景进行删除;
19、如果属于道路,则将该道路的栅格点云和/或道路的点按照道路保存。
20、在一些实施例中,所述点云包括自车激光雷达采集的环境信息,所述确定所述点云在utm坐标系下的位置点,包括:
21、将自车坐标系下的点云按照栅格划分,进行栅格化处理;
22、栅格化处理之后,按照每个栅格id和栅格尺寸,计算出每个所述栅格在自车坐标系下的x、y坐标;
23、根据utm坐标以及所述自车定位信息中的航向角信息,将栅格在自车坐标系下的x、y坐标转换为utm坐标。
24、在一些实施例中,所述将utm坐标系下的位置点转换为所述瓦片id,包括:
25、按照如下方式将在utm坐标系下位置点转换为所述瓦片id的过程:
26、瓦片id_xid=(utm_x-start_x)/tilesize;
27、瓦片id_yid=(utm_y-start_y)/tilesize;
28、所述根据所述瓦片id,计算瓦片图中的行列号数和列数,以确定所述待检测区域内的道路属性,包括:
29、按照如下方式计算所述瓦片id中的行数和列数:
30、瓦片id_row=(utm_y-start_y-png_yid*tilesize)/gridsize;
31、瓦片id_col=(utm_x-start_x-png_xid*tilesize)/gridsize,
32、其中,start_x、start_y表示设定的utm坐标系中x轴、y轴方向的起点,tilesize表示每张瓦片图覆盖的尺寸,gridsize表示点云栅格的尺寸,id_xid、id_yid表示距离utm的x轴、y轴方向的起点的第几个瓦片。
33、在一些实施例中,所述瓦片图的文件名至少包括所述瓦片图在x轴、y轴方向上的个数值。
34、在一些实施例中,将所述瓦片图的文件名按照预设规则转换为code编码,得到瓦片图与瓦片图的文件名之间的映射关系。
35、第二方面,本申请实施例还提供一种有效行驶区域的快速确定装置,其中,所述装置包括:utm转换模块,用于将待检测区域的高精地图按照在utm坐标系下设定的x轴和y轴方向上的起点以及瓦片覆盖尺寸,划分成utm坐标系下的瓦片图,其中,所述utm坐标系下的瓦片图中的每个像素对应所述utm坐标系中固定大小的栅格尺寸;匹配模块,用于匹配所述待检测区域的点云与所述utm坐标系下的瓦片图,得到所述待检测区域内的道路属性;生成模块,用于根据符合预设条件的所述道路属性,生成有效行驶区域。
36、第三方面,本申请实施例还提供一种电子设备,包括:处理器;以及被安排成存储计算机可执行指令的存储器,所述可执行指令在被执行时使所述处理器执行上述方法。
37、第四方面,本申请实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储一个或多个程序,所述一个或多个程序当被包括多个应用程序的电子设备执行时,使得所述电子设备执行上述方法。
38、本申请实施例采用的上述至少一个技术方案能够达到以下有益效果:将待检测区域的高精地图划分成utm坐标系下的瓦片图,由于按照utm坐标系下设定了的x轴和y轴方向的起点,故可以选择所述待检测区域的位置。由于确定了瓦片覆盖尺寸,故可以按照区域为单位进行划分。之后匹配所述待检测区域的点云与所述utm坐标系下的瓦片图,得到所述待检测区域内的道路属性。通过在待检测区域建立utm坐标系下的瓦片图再与点云进行匹配,可以快速确定出有效行驶区域。从而保证并提高自动驾驶感知模块的高效、稳定。
技术特征:
1.一种有效行驶区域的快速确定方法,其中,所述方法包括:
2.如权利要求1所述方法,其中,所述瓦片图包括瓦片id,所述瓦片id为所述瓦片图的文件名,所述匹配所述待检测区域的点云与所述utm坐标系下的瓦片图,得到所述待检测区域内的道路属性,包括:
3.如权利要求2所述方法,其中,所述确定所述待检测区域内的道路属性包括:
4.如权利要求2所述方法,其中,所述点云包括自车激光雷达采集的环境信息,所述确定所述点云在utm坐标系下的位置点,包括:
5.如权利要求4所述方法,其中:
6.如权利要求1所述方法,其中,所述瓦片图的文件名至少包括所述瓦片图在x轴、y轴方向上的个数值。
7.如权利要求6述方法,其中,将所述瓦片图的文件名按照预设规则转换为code编码,得到瓦片图与瓦片图的文件名之间的映射关系。
8.一种有效行驶区域的快速确定装置,其中,所述装置包括:
9.一种电子设备,包括:
10.一种计算机可读存储介质,所述计算机可读存储介质存储一个或多个程序,所述一个或多个程序当被包括多个应用程序的电子设备执行时,使得所述电子设备执行所述权利要求1~7之任一所述方法。
技术总结
本申请公开了一种有效行驶区域的快速确定方法、装置及电子设备、存储介质,所述方法包括将待检测区域的高精地图按照在UTM坐标系下设定的X轴和Y轴方向上的起点以及瓦片覆盖尺寸,划分成UTM坐标系下的瓦片图,其中,所述UTM坐标系下的瓦片图中的每个像素对应所述UTM坐标系中固定大小的栅格尺寸;匹配所述待检测区域的点云与所述UTM坐标系下的瓦片图,得到所述待检测区域内的道路属性;根据符合预设条件的所述道路属性,生成有效行驶区域。通过本申请能够快速确定出有效行驶区域,从而保证自动驾驶感知模块的高效、稳定。
技术研发人员:胡孟孟,李成军
受保护的技术使用者:智道网联科技(北京)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!