一种无人船库区水下地形测量的方法与流程
本发明涉及无人船测绘领域,尤其是涉及一种无人船库区水下地形测量的方法。
背景技术:
1、近年来,我国加大了对库区水下地形测量的投入,确保水下地形测量的精准性是加快水利工程建设速度的重要路径。水上测绘领域的环境条件较为艰苦,比陆地测量工作艰难很多。水上测绘工作的开展不仅充满各种困难与艰辛,同时测绘人员需要面临测绘安全问题。传统技术下的水下测量工作都是借助人工操作船只进行地形定位及地形测量,因此传统水下测量结果的精确度和测量人员的安全性相对较低。
2、无人船在水下地形测量中的应用,可大大提升传统水上测量的测量效率和测量精度。
3、例如,一种在中国专利文献上公开的“一种水下地形测量装置及方法”,其公开号为cn109269469a,通过测量装置与水下地形的夹角之间的三角函数关系进行测量,该方法测量效率较低,需要在整个待测量水域进行数据采集后整理计算,采集过程及计算过程会产生较大误差,测量精确度较低,同时需要测量人员进行实时的现场操作,测量过程复杂且便利性较低。
技术实现思路
1、本发明是为了克服现有技术中,对水库库区水下地形测量过程效率低下,需要测量工人到达现场测绘,测量过程复杂且便利较低,完成测量后的数据精确度较低的问题,提供一种无人船库区水下地形测量的方法,通过无人船对单一方向上的水下地形进行实时测量,不需要工人到达现场即可完成地形测量,便利性高且测量过程简单高效,通过无人船控制系统保证无人船在测量过程中的稳定和自动校正,测量准确度高。
2、为了实现上述技术目的,本发明采用以下技术方案:
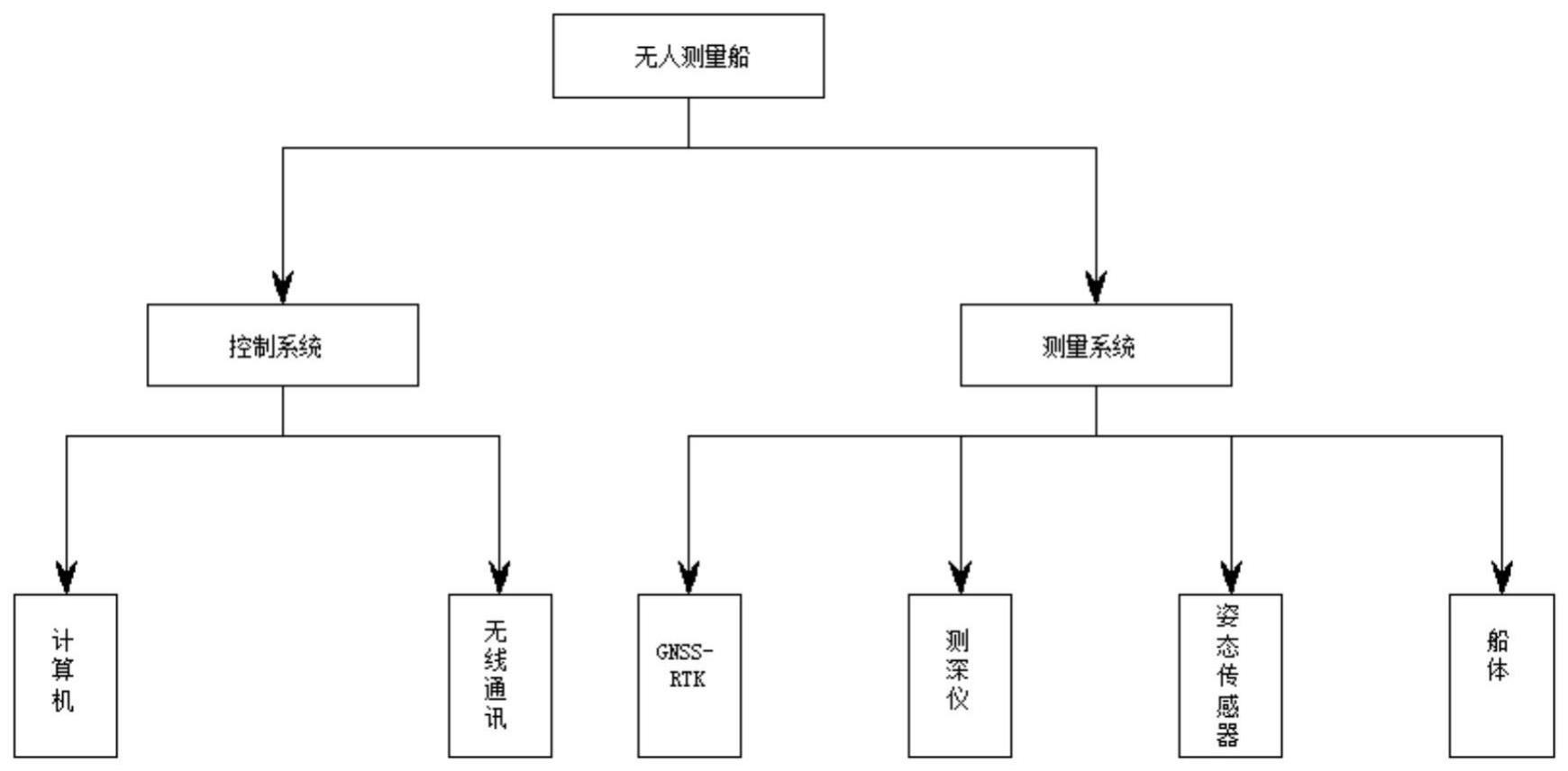
3、一种无人船库区水下地形测量的方法,包括控制系统侧和测量系统侧,所述控制系统侧通过对无人船运行情况、航行状态及测量数值的数据信息精度值进行控制调整,利用基站的控制系统对检测收集的信息进行全面性把控;所述测量系统包括姿态传感器,通过姿态传感器对当前测量数据进行实时纠正,完成水下地形图的绘制和三维模型的生成。
4、控制系统是对无人船运行状况、航行情况及测量数值等相关数据信息的精度值进行把控,利用岸边基站的控制系统对水深信息、水流速度信息和船体的信息进行全面性把控,测量系统主要由gnss-rtk及测深仪器构成,同时利用姿态传感器对测量数据信息实时进行纠正,确保系统获得的水下三维坐标的准确性,为水下地形图绘制及三维模型的生成提供准确性基础数据。
5、作为优选,所述无人船测量过程具体包括以下步骤:
6、步骤s1:无人船控制测试环节;
7、步骤s2:无人船操作测试环节;
8、步骤s3:无人船数据采集环节;
9、步骤s4:数据分析测绘环节和数据精度判断环节。
10、作为优选,所述步骤s1包括以下步骤:
11、步骤s1-1:通过gnss定位系统提供精确坐标定位,完成自主导航;
12、步骤s1-2:将无人船的测绘运动方向保持与水流方向一致,并实时调整运动方向;
13、步骤s1-3:完成运动方向控制后,根据水流的流速,实时调整无人船的运动姿态,实时保持匀速行驶。
14、无人船在进行自动导航测量的过程中,被测量区域的影像资料导入无人船内置的控制软件系统,对无人船的航线进行二次规划,完成二次规划后无人船在gnss-rtk的导航下进行航行和姿态校正,记录航行轨迹和姿态校正情况,将航行数据和姿态校正数据发送到计算机。
15、通过gnss导航保持无人船在测量过程中的姿态平稳以及数据发送、记录,在后续计算过程中调用相应数据,降低无人船姿态变化带来的数据误差,提高测量结果的准确度。
16、作为优选,所述步骤s2还包括以下步骤:
17、步骤s2-1:对测绘过程中的控制系统和测量系统进行相关设备功能检测;
18、步骤s2-2:完成设备功能检测后,将测量线间距设置为10cm,利用计算机及相关辅助设备进行连接测量;
19、步骤s2-3:存储设备对相关模拟信息数据记录进行一级保存处理。
20、一级保存处理即为待处理,在完成数据精确度判断前不保存入存储系统,测量单位利用无人船进行水下地形测量过程中,在对无人船测量数据信息精确性检测时,对抽检库区中设置50个随机测试点进行数据信息校验工作,防止出现大量异常数据影响后续高程计算,提高测量方法的精确性。
21、作为优选,所述步骤s3包括以下步骤:
22、步骤s3-1:通过无人船传递安装的声呐装置进行声波发生,测量系统计算发生发射波与接受反射波之间的时间差;
23、步骤s3-2:利用声波在水中的传播速度进行当前测量点水深计算;
24、步骤s3-3:完成水底高度计算后,通过姿态传感器进行姿态信息修正,实现无人船三维坐标的实时修正,记录下修正数据;
25、步骤s3-4:将记录下的修正数据反馈到水深计算过程,对水深计算数值进行误差修正,完成水底高程测量。
26、作为优选,所述水底高程计算过程如下所示:
27、步骤sp1:将gnss天线中的相位中心高程设置为h,gnss天线相位中心到无人船吃水高度的距离设置为h0;
28、步骤sp2:将无人船的船体丝带设置为h1,无人船测量系统中测探仪所测量得到的水深为h,水底高程为d;
29、步骤sp3:根据步骤sp1和sp2得到的数据,完成水底高程的具体计算公式,如下所示:
30、d=h-h0-(h-h1)。
31、基于gnss-rtk动态定位技术,以及无人船测量系统运行过程中利用姿态传感器对船体的姿态信息修正,继而实现对无人船三维坐标的实时修正;避免无人船测量过程中由于船体的晃动,导致无人船水下地形测量数据失真,确保水下地形测量成果的精确度。
32、作为优选,所述步骤s4包括以下步骤:
33、步骤s4-1:完成整个测试水底的高度测量和高程计算,将测量完成的高度数据与存储设备中的历史数据进行数据比对调取,根据比对结果进行行动判断并做出相应动作反馈;
34、步骤s4-2:抽取选取测量目标库区面积的10%,将测试点高程差值控制在0.2m范围内抽取随机测试点,对测试点进行合格率检测;
35、步骤s4-3:完成合格率检测后,若合格率高于95%,则整个测试过程以及测试结果具有数据参考价值,并对数据进行二级保存处理;若合格率低于95%,则整个测试过程以及测试结果不具有数据参考价值,将该一级保存处理的数据删除。
36、作为优选,在无人船测量进行所述步骤s4的取样过程时,若无人船出现异常情况,如天气骤变导致无人船航线出现明显偏差,则立刻停止数据采集测量并将已完成测量的数据进行上传,以一级保存处理该数据,并在下一次相同路径的测量采样过程中进行二次调取。
37、因此,本发明具有以下有益效果:
38、利用姿态传感器对测量数据信息实时进行纠正,确保系统获得的水下三维坐标的准确性,为水下地形图绘制及三维模型的生成提供准确性基础数据;
39、基于gnss-rtk动态定位技术,以及无人船测量系统运行过程中利用姿态传感器对船体的姿态信息修正,继而实现对无人船三维坐标的实时修正;避免无人船测量过程中由于船体的晃动,导致无人船水下地形测量数据失真,确保水下地形测量成果的精确度。
- 还没有人留言评论。精彩留言会获得点赞!