一种城市市政基础设施普查系统及方法与流程
本发明涉及一种普查系统,特别是一种城市市政基础设施普查系统及方法。
背景技术:
1、城市地下市政基础设施普查类型主要包括地下空间设施、工程设施、管线及其附属设施等。其中城市地下空间是指城市建设区范围内的地下空间,城市开发建设的地下空间领域非常广泛,包括交通设施、市政工程设施、商业设施、文化娱乐和体育设施、防灾设施、生产和储存设施、能源设施、科研实验设施等,对于节省土地,减少地面环境污染,缓解地面交通堵塞,提供防灾空间等具有重要作用。
2、城市地下空间普查对于掌握地下空间实际状况和了解城市未来发展需要,合理部署各类设施的空间和规模,城市地下市政基础设施高效安全运行和空间集约利用等具有重要意义。城市地下空间普查工作中,不规则空间测量是较为费时费力的环节,亟需智能化的产品或方法予以解决,以降低人工成本,提高城市地下空间普查工作的效率。
技术实现思路
1、因此,本发明为了提高城市地下空间普查效率,设计了一种城市市政基础设施普查系统及方法,在城市地下不规则空间内可以快速采集空间尺寸、计算空间面积,不规则空间是指四周墙壁竖直,水平截面为多边形的空间。
2、本发明所采用的技术方案是:
3、一种城市市政基础设施普查系统,其特征在于:
4、包括数据采集模块、成果质检模块、成果汇交模块。
5、所述数据采集模块用于采集地下空间的尺寸数据,包括背架、铰接环、步进电机、垂重柱、信号板;所述背架为n形板,前侧版面上固定连接有背带,工作人员将采集模块背在身后;所述背架的后侧板面靠近顶端,固定连接有向后向上倾斜的颈部支架;所述颈部支架的顶部向后固定设置有水平朝后的u型架;所述铰接环的中间结构为圆形环,所述铰接环的左右两端,固定设置有左右水平方向的细圆柱形的环外铰接轴,所述环外铰接轴铰接装配在u型架上,使得铰接环在前后面内转动;所述铰接环上前后贯穿开设有铰接孔;所述步进电机的外壳上固定设置前后水平的细圆柱形的机壳铰接轴,所述机壳铰接轴铰接装配在铰接环的铰接孔中;所述步进电机的底部固定连接有重心柱,所述步进电机的顶部伸出有输出轴,所述输出轴上固定连接有信号板,所述步进电机带动信号板水平旋转;所述信号板的前侧面板上,水平均匀分布有多个激光接收器,位于所述输出轴正前方的激光接收器的中央,装有激光发射器,所述激光发射器向前水平发射激光脉冲信号。
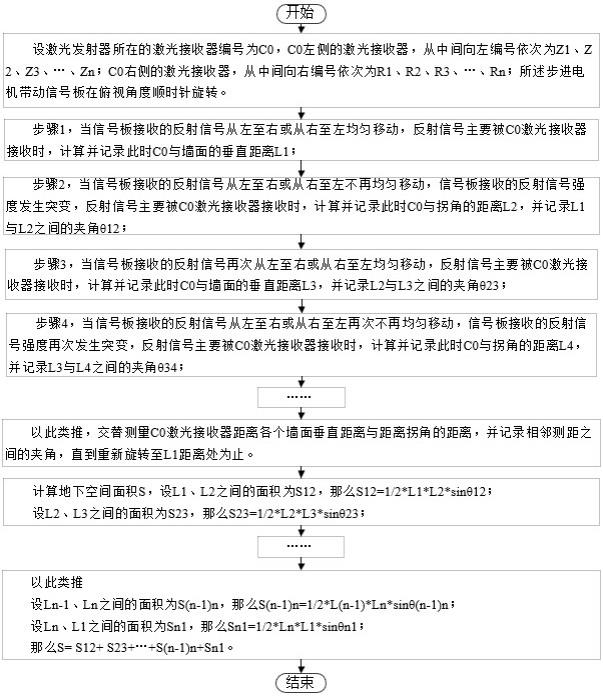
6、设激光发射器所在的激光接收器编号为c0,c0左侧的激光接收器,从中间向左编号依次为z1、z2、z3、…、zn;c0右侧的激光接收器,从中间向右编号依次为r1、r2、r3、…、rn;所述步进电机带动信号板在俯视角度顺时针旋转。
7、步骤1,当信号板接收的反射信号从左至右或从右至左均匀移动,反射信号主要被c0激光接收器接收时,计算并记录此时c0与墙面的垂直距离l1;
8、步骤2,当信号板接收的反射信号从左至右或从右至左不再均匀移动,信号板接收的反射信号强度发生突变,反射信号主要被c0激光接收器接收时,计算并记录此时c0与拐角的距离l2,并记录l1与l2之间的夹角θ12;
9、步骤3,当信号板接收的反射信号再次从左至右或从右至左均匀移动,反射信号主要被c0激光接收器接收时,计算并记录此时c0与墙面的垂直距离l3,并记录l2与l3之间的夹角θ23;
10、步骤4,当信号板接收的反射信号从左至右或从右至左再次不再均匀移动,信号板接收的反射信号强度再次发生突变,反射信号主要被c0激光接收器接收时,计算并记录此时c0与拐角的距离l4,并记录l3与l4之间的夹角θ34;
11、……
12、以此类推,交替测量c0激光接收器距离各个墙面垂直距离与距离拐角的距离,并记录相邻测距之间的夹角,直到重新旋转至l1距离处为止。
13、计算地下空间面积s,设l1、l2之间的面积为s12,那么s12=1/2*l1*l2*sinθ12;
14、设l2、l3之间的面积为s23,那么s23=1/2*l2*l3*sinθ23;
15、……
16、以此类推
17、设ln-1、ln之间的面积为s(n-1)n,那么s(n-1)n=1/2*l(n-1)*ln*sinθ(n-1)n;
18、设ln、l1之间的面积为sn1,那么sn1=1/2*ln*l1*sinθn1;
19、那么s= s12+ s23+…+s(n-1)n+sn1。
20、所述成果质检模块用于比对旧有测量数据与新测量数据的差异,当两者之间测量数据差异超过阈值时,重新测量此地下空间。
21、所述成果汇交模块用于按照下地空间编号,汇总各个地下空间的测量数据。
22、进一步讲,所述数据采集模块配备有蓄电池供能。
23、进一步讲,所述步进电机、激光发射器、激光接收器连接有控制电路、处理器、计时器。
24、一种城市市政基础设施普查方法,其特征在于:
25、第一步,设计数据采集模块,采集地下空间的尺寸数据,采集模块包括背架、铰接环、步进电机、垂重柱、信号板;所述背架为n形板,前侧版面上固定连接有背带,工作人员将采集模块背在身后;所述背架的后侧板面靠近顶端,固定连接有向后向上倾斜的颈部支架;所述颈部支架的顶部向后固定设置有水平朝后的u型架;所述铰接环的中间结构为圆形环,所述铰接环的左右两端,固定设置有左右水平方向的细圆柱形的环外铰接轴,所述环外铰接轴铰接装配在u型架上,使得铰接环在前后面内转动;所述铰接环上前后贯穿开设有铰接孔;所述步进电机的外壳上固定设置前后水平的细圆柱形的机壳铰接轴,所述机壳铰接轴铰接装配在铰接环的铰接孔中;所述步进电机的底部固定连接有重心柱,所述步进电机的顶部伸出有输出轴,所述输出轴上固定连接有信号板,所述步进电机带动信号板水平旋转;所述信号板的前侧面板上,水平均匀分布有多个激光接收器,位于所述输出轴正前方的激光接收器的中央,装有激光发射器,所述激光发射器向前水平发射激光脉冲信号。
26、设激光发射器所在的激光接收器编号为c0,c0左侧的激光接收器,从中间向左编号依次为z1、z2、z3、…、zn;c0右侧的激光接收器,从中间向右编号依次为r1、r2、r3、…、rn;所述步进电机带动信号板在俯视角度顺时针旋转。
27、其数据采集方式为:
28、步骤1,当信号板接收的反射信号从左至右或从右至左均匀移动,反射信号主要被c0激光接收器接收时,计算并记录此时c0与墙面的垂直距离l1;
29、步骤2,当信号板接收的反射信号从左至右或从右至左不再均匀移动,信号板接收的反射信号强度发生突变,反射信号主要被c0激光接收器接收时,计算并记录此时c0与拐角的距离l2,并记录l1与l2之间的夹角θ12;
30、步骤3,当信号板接收的反射信号再次从左至右或从右至左均匀移动,反射信号主要被c0激光接收器接收时,计算并记录此时c0与墙面的垂直距离l3,并记录l2与l3之间的夹角θ23;
31、步骤4,当信号板接收的反射信号从左至右或从右至左再次不再均匀移动,信号板接收的反射信号强度再次发生突变,反射信号主要被c0激光接收器接收时,计算并记录此时c0与拐角的距离l4,并记录l3与l4之间的夹角θ34;
32、……
33、以此类推,交替测量c0激光接收器距离各个墙面垂直距离与距离拐角的距离,并记录相邻测距之间的夹角,直到重新旋转至l1距离处为止。
34、计算地下空间面积s,设l1、l2之间的面积为s12,那么s12=1/2*l1*l2*sinθ12;
35、设l2、l3之间的面积为s23,那么s23=1/2*l2*l3*sinθ23;
36、……
37、以此类推
38、设ln-1、ln之间的面积为s(n-1)n,那么s(n-1)n=1/2*l(n-1)*ln*sinθ(n-1)n;
39、设ln、l1之间的面积为sn1,那么sn1=1/2*ln*l1*sinθn1;
40、那么s=s12+ s23+…+s(n-1)n+sn1。
41、第二步,比对旧有测量数据与新测量数据的差异,当两者之间测量数据差异超过阈值时,重新测量此地下空间。
42、第三步,按照下地空间编号,汇总各个地下空间的测量数据。
43、本发明的原理为:所述激光发射器发射激光脉冲信号,所述激光接收器接收激光脉冲信号,脉冲信号在空气中的传播速度v是固定的,根据脉冲信号从发出到接收的时间差△t,即可计算出c0与墙面的距离g=1/2*v*△t;根据此原理,就可以交替测量c0激光接收器距离各个墙面垂直距离与距离拐角的距离。
44、墙面在接收到脉冲信号后会发生漫反射,但大部分信号会遵循镜面反射原理,当当信号板接收的反射信号从左至右或从右至左均匀移动时,说明激光脉冲信号沿着面状的墙面水平移动,当反射信号主要被c0激光接收器接收时,说明此时发射出去的信号路径和反射回来的信号路径重叠,即此时测量的是c0与墙面的垂直距离。
45、当信号板接收的反射信号从左至右或从右至左不再均匀移动,信号板接收的反射信号强度发生突变时,说明激光脉冲移动到了拐角处,当反射信号主要被c0激光接收器接收时,说明此时发射出去的信号路径和反射回来的信号路径重叠,即此时测量的是c0与拐角的直线距离。
46、本发明一种城市市政基础设施普查系统及方法具有如下优点:
47、(1)利用激光脉冲信号在墙面反射和拐角处反射的不同特点,识别测量的距离是与墙面的垂直距离,还是与拐角处的直线距离,构思新颖独特;
48、(2)数据采集模块设计中,在信号板上水平布设多件激光接收器,在正对步进电机的输出轴的激光接收器中心处设置唯一的激光发射器,实现发射信号和返回信号的路径重叠情况的识别,设计巧妙;
49、(3)铰接环与u型架铰接装配、步进电机的机壳与铰接环铰接装配,并且两处铰接装配结构呈十字交叉形,步进电机的下方还固定连接有重心柱,实现无论采集模块呈任何角度倾斜,信号板都持续水平旋转的目标,实用可靠。
50、所以,这种城市地下空间普查系统及方法,能够实现城市地下不规则空间面积的快速采集,降低人工成本,提高城市地下空间普查工作的效率。。
51、本发明的其他特征和优点将在随后的说明书中阐述,或者通过实施本发明而了解。
- 还没有人留言评论。精彩留言会获得点赞!