一种多线激光雷达障碍物检测方法与流程
本发明涉及一种多线激光雷达领域,具体是一种多线激光雷达障碍物检测方法。
背景技术:
1、智能驾驶领域,传感器(相机、激光雷达)是获取场景环境数据的手段,对这些数据进行一定的处理,得到障碍物等场景元素,以用于后续的无人车决策与规划。这个模块通常也被称为感知模块。感知模块之于无人车就像眼睛之于人类,是看到场景有什么和是什么的主要途径。障碍物检测是感知模块主要的任务之一,稳定的检测是无人车安全的保障。障碍物通常包括:动态障碍物(行为、自行车、三轮车、汽车等)、静态障碍物(锥形桶、纸盒等)。
2、多线激光雷达因其价格便宜广泛应用于低速无人车中,但因其线束不高(相对于高线而言),采集的点云纵向较稀,难于基于单帧点云进行障碍物检测与识别。
3、目前的技术方案主要有三种:
4、1.以视觉为主的深度学习思路。即用相机为主要传感器,通过大量标注数据,训练神经网络模型,从面以高算力gpu的方式实现障碍物感知。
5、2.以高线束激光雷达为主。所谓高线束激光雷达通常指32线、64线、1282.线甚至更高,实现思路也分两种,其一是深度学习,目前基于点云的深度学习,其运算量非常大,还很难用于实际工程应用中,实际中使用较少;其二是基于规则的检测,即在地面区域检测可能存在的障碍物,通过特征分析,得到障碍物信息。
6、3.以单线激光雷达为主。不进行障碍物检测,直接将激光雷达数据输入规划模块,以占用地图的形式直接进行规划,回避障碍物检测。
7、现有的激光雷达障碍物检测方法要求大量标注数据,同时对车端算力要求非常高,必须使用gpu,硬件成本较高,不过其最大的缺点在于价格非常高。缺少障碍物信息,对无法进行智能决策,对车辆智能化受限极大。
技术实现思路
1、对于现有的一产生的问题,本发明的目的在于提供一种多线激光雷达障碍物检测方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
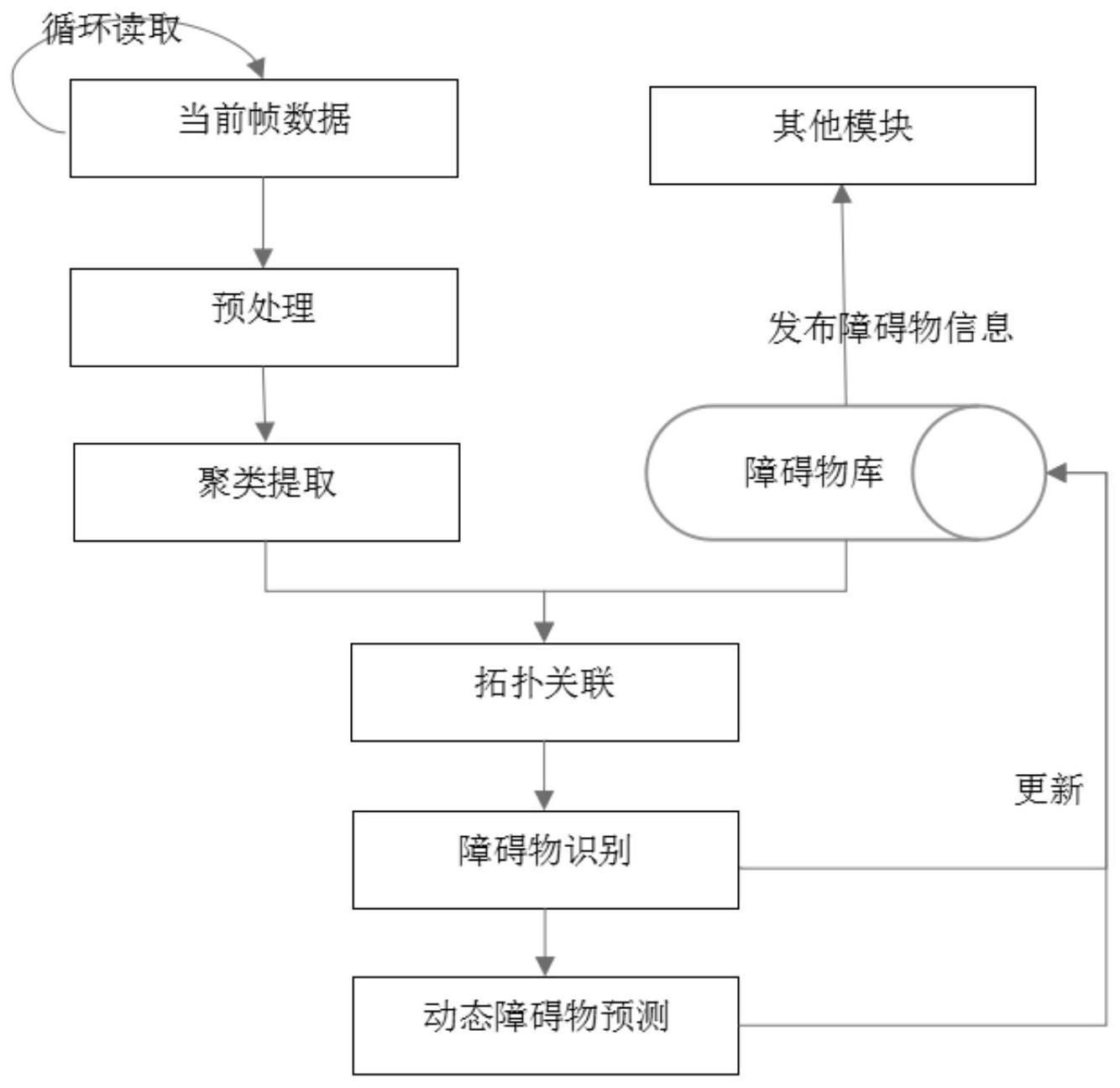
3、一种多线激光雷达障碍物检测方法,其方法步骤如下:
4、s1、预处理
5、预处理分三步:坐标转换、滤波、补偿;
6、1)坐标转换:将点云依标定参数(激光雷达坐标系到车辆坐标的转换参数),转换到车辆坐标系,如果存在多个激光雷达,则将对应时间窗口(100ms)下所有激光雷达产生的点云分别转换到车辆坐标系,然后合并形成整体点云;
7、2)滤波:滤除远点(大于50m的点)、无效点、车辆车身上投影点;
8、3)补偿:按速度对激光雷达数据进行补偿,降低因运动导致的点云畸变;
9、s2、聚类提取
10、从地图中读取可通行区域,并用可通行区域过滤点云,同时去除地面点,所余下的点将全部是可行驶区域内地面以上的点;余下的点称为障碍物点,对障碍物点进行几何聚类,聚类的目的是将相近的聚在一起,形成一个个点簇,每一簇点即为待定障碍物;
11、s3、拓扑关联
12、对每个点簇,根据其中心点,在障碍库中以最近邻方式查找,若存在满足阈值(车速v*时间间隔0.1s+标准差0.3m)的障碍物,则关联,否则新建障碍物;
13、对每个障碍物,重新计算其平均中心点及外包围盒,统计其历史帧中心点,若历史帧所有中心点满足正态分布(标准差大于0.3m),则判定此障碍物静态障碍物;若中心点坐标形成轨迹,则断定其为动态障碍物;
14、s4、障碍物识别
15、对于静态障碍物,将其历史帧点云进行叠加,形成稠密点云,通过预置模型库的形式,计算稠密点云到每个模型的距离,若最小距离满足阈值(0.2m),则其对应的类型即为该模型的类别;否则按障碍物尺寸大小输出其类型;
16、对于动态障碍物,将其历史帧点云根据其对应时间戳下的车辆定位信息进行拼接,根据其外包围盒大小断定其为人、自行车、车辆、未知中的一类;
17、s5、动态障碍物预测
18、预测的目标是计算动态障碍物的速度与轨迹;
19、平均速度:取最近1s内数据,积分计算其行驶的距离,再除以时间(1s)即为其平均速度;
20、轨迹预测:取最近3s内数据,对轨迹点进行二项式拟合,同时给拟合结果必过当前点,推测其未来3s可能的行驶轨迹。
21、作为本发明进一步的方案:步骤s2中聚类的方法为:
22、1)随机从聚类点中取出一点形成新点簇;
23、2)遍历障碍物点;
24、3)计算每一点到点簇中所有点距离,或其中任一距离小于阈值(0.3m),则将其添加到点簇中,同时将点从障碍物点中移除;
25、4)遍历结束。若障碍物点不为空,则继续重复1)2)3)直到障碍物点为空。最终产生n个点簇;
26、5)计算每一个聚类后点簇的几何中心及其外包围盒。
27、作为本发明再进一步的方案:所述的激光雷达设有两组,两组激光雷达分别安装于车辆的前左和前右,每个传感器有270度有效范围。
28、作为本发明再进一步的方案:所述的激光雷达设一组,一组激光雷达安装于车辆的项端,传感器具有360度有效范围。
29、与现有技术相比;本发明的有益效果是:本发明对于每一帧进行聚类检测,得到障碍物点;对于每个障碍物在时序上进行拓扑关联,每个障碍物具体不同时刻获取的点簇信息;对每个障碍物分别分析其轨迹、外包围盒及点云,判定其类别,实现检测即识别;对于动态障碍物,实现检测即预测,在检测的同时预测其速度与轨迹。本发明计算速度快,对算力要求低,稳定性高,障碍物检测的同时,实现对动态障碍物的预测,通过在时序上的累加,逐渐实现精确识别、精准预测。
技术特征:
1.一种多线激光雷达障碍物检测方法,其特征在于,其方法步骤如下:
2.根据权利要求1所述的多线激光雷达障碍物检测方法,其特征在于,步骤s2中聚类的方法为:
3.根据权利要求1所述的多线激光雷达障碍物检测方法,其特征在于,所述的激光雷达设有两组,两组激光雷达分别安装于车辆的前左和前右,每个传感器有270度有效范围。
4.根据权利要求1所述的多线激光雷达障碍物检测方法,其特征在于,所述的激光雷达设一组,一组激光雷达安装于车辆的项端,传感器具有360度有效范围。
技术总结
本发明公开一种多线激光雷达障碍物检测方法,属于多线激光雷达领域。其方法步骤如下:S1、预处理,分三步坐标转换、滤波、补偿;S2、聚类提取,对障碍物点进行几何聚类,形成一个个点簇,每一簇点即为待定障碍物;S3、拓扑关联,对每个点簇,根据其中心点,在障碍库中以最近邻方式查找关联,判定障碍物静态障碍物或动态障碍物;S4、障碍物识别,对于静态障碍物,将其历史帧点云进行叠加,形成稠密点云;对于动态障碍物,将其历史帧点云根据其对应时间戳下的车辆定位信息进行拼接;S5、动态障碍物预测。本发明计算速度快,对算力要求低,稳定性高,障碍物检测的同时,实现对动态障碍物的预测,通过在时序上的累加,逐渐实现精确识别、精准预测。
技术研发人员:桂坡坡,陈磊,徐昆源
受保护的技术使用者:合肥极目行远科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!