一种管线陀螺仪的制作方法
1.本发明涉及管道测量技术领域,具体涉及一种管线陀螺仪。
背景技术:
2.随着城市的现代化建设和发展,地下管道犹如城市血脉,日益复杂和发达,电力、燃气、电信、给排水、雨污水等各类非开挖施工管线越来越多,管道交错在一起,蛛网密布,错综复杂。给城市地下空间规划管理设计及施工带来了较大的困难。对已建成的地下管线数据库的管理与维护,需要对地下各类非开挖管线进行精准定位。管线陀螺仪(地下管线惯性定位仪)是一种对地下非开挖管线进行精确定位的高精密仪器。地下管线惯性定位仪结合了陀螺仪定向惯性导航、计算机三维计算等技术,通过地下管线惯性定位仪拖曳惯性陀螺定位仪在待测地下管线中穿行,从而生成地下管道中心轴线的三维坐标与位置图。
3.现有技术中:申请号为201910012666.1,名称为一种管道路径视频监测器的发明专利,包括:电子舱、滑动轴、支撑支架、轮组。电子舱内安装有主控电板、高精度陀螺仪、红外摄像头,6组轮组中有2组轮组为里程轮,一用一备且安装于舱底一端的支撑支架上。支撑支架可以根据实际管径大小,随意调节轮组支撑状态,靠弹簧的张力将电子舱支撑保持在管线的中心线位置,管道机器靠外力牵引在管道内沿中心线行走。该发明集路径测量计算,视频采集功能于一体,且自身结构强度、防水、防爆安全等级均满足管线工程施工要求。然而虽然该装置能够适用不同内径的管道使用,但是松紧度不便于调节,从而缓冲效果不能满足使用需要,在实际使用时,容易导致受力不均导致的摆动,稳定性较差,且在管道内遇到障碍时会影响装置的正常使用。
4.因此,发明一种管线陀螺仪来解决上述问题很有必要。
技术实现要素:
5.本发明的目的是提供一种管线陀螺仪,通过在延伸杆上旋动螺母件,调节对第一环套移动范围的限定,适应管道内径的大小,使导向轮部能够抵接在不同管道内壁上,配合压缩弹簧和拉伸弹簧的缓冲减震作用,装置遇到障碍时导向组件通过管道内壁给的压力自动调整角度,预紧力环形压力传感器感测第一环套承受压力,调节时使两侧的压力值相同,保证装置进入管道后能够有效支撑的同时,两侧受力相同,以解决技术中的上述不足之处。
6.为了实现上述目的,本发明提供如下技术方案:一种管线陀螺仪,包括测量主机和行走机构,所述行走机构的数量设置为两个,且两个行走机构安装于测量主机的两端,所述行走机构远离测量主机的一端连接牵引钢丝绳,所述行走机构包括:
7.套接于测量主机端部的封闭端头,且封闭端头与测量主机的连接处设有密封垫圈,封闭端头远离测量主机的一端设有限位杆部,所述限位杆部外部活动设置有第一环套和第二环套,且封闭端头、第一环套和第二环套之间设有导向组件;
8.导向组件包括第一折叠架和第二折叠架,且第二折叠架套接于第一折叠架外部,所述第一折叠架和第二折叠架之间转动连接有导向轮部,所述第一折叠架和第二折叠架远
离导向轮部的端部分别连接在封闭端头和第一环套上,所述第一折叠架与第一环套之间设有支撑板,所述支撑板两端分别与第一折叠架与第一环套铰接;
9.所述限位杆部包括固定在封闭端头轴心处的滑杆,所述滑杆另一端开设有螺纹槽,所述螺纹槽内螺纹连接有螺栓头,且螺栓头一端一体设置有延伸杆,所述延伸杆外表面设有外螺纹,且延伸杆外部螺纹连接有螺母件,所述滑杆外部且位于螺母件与第一环套之间的位置处设有压缩弹簧,所述第一环套与第二环套之间设有拉伸弹簧;
10.导向轮部包括转动连接于第一折叠架与第二折叠架套接结构内侧的行走轮,所述行走轮外侧开设有若干均匀分布的收纳槽,所述收纳槽内设有缓冲弹簧,行走轮两侧边缘部位均通过螺丝固定安装有环状罩壳,且环状罩壳内侧设有容纳腔,所述环状罩壳外侧开设有兜口,所述容纳腔内设有多个金属滚珠,且多个金属滚珠分别与兜口和收纳槽一一对应,所述行走轮内部设有环槽,且收纳槽与环槽之间贯穿有通气孔,所述通气孔顶端和收纳槽底部活动连接有密封塞,所述环槽内设有贯穿行走轮的注气口,所述注气口的输入端设有微型气泵,所述环槽侧部开设有泄压孔,且泄压孔内设有电磁阀。
11.作为本发明的优选方案,所述第一环套靠近压缩弹簧的一侧开设有凹槽,且凹槽内安装有橡胶缓冲垫,所述螺母件底部设有金属垫片;
12.所述压缩弹簧设置为锥形弹簧,且锥形弹簧两端内径分别小于金属垫片外径和缓冲垫外径;
13.所述缓冲垫与凹槽之间设有预紧力环形压力传感器,所述预紧力环形压力传感器的连接端设有显示器。
14.作为本发明的优选方案,所述封闭端头一端外侧固定连接有第一耳板,所述第二环套外侧固定连接有第二耳板,且第一折叠架和第二折叠架上均设有与第一耳板和第二耳板匹配的槽口;
15.所述拉伸弹簧设置为平弹簧,且拉伸弹簧两端均固定连接有环形片,且两侧的环形片分别通过螺丝固定在封闭端头和第二环套上。
16.作为本发明的优选方案,所述延伸杆远离滑杆一端的两侧均开设有平口,且两侧平口之间贯穿有销孔,所述销孔内插接有销轴,滑杆端部通过销轴铰接有u形拉板;
17.所述u形拉板顶端通过单向轴承转动连接有安装扣,所述牵引钢丝绳固定在安装扣上。
18.作为本发明的优选方案,所述滑杆直径大于延伸杆直径,且延伸杆直径大于螺栓头直径。
19.作为本发明的优选方案,还包括红外线摄像头和红外测距传感器,所述红外线摄像头和红外测距传感器均安装于测量主机外侧;
20.所述测量主机内部设有控制器,且控制器的连接端设有蓄电池,所述测量主机上还设有gps定位模块;
21.所述红外线摄像头、红外测距传感器和gps定位模块均与蓄电池电性连接,所述红外线摄像头、红外测距传感器和gps定位模块均与控制器的输入端电性连接。
22.作为本发明的优选方案,所述支撑板的数量设置为多组,且每组支撑板设置为两个,两个支撑板平行分布,且两个支撑板之间的距离大于导向轮部厚度;
23.环状罩壳由铝合金材质制成,且环状罩壳外侧设有用于防止打滑的滚花纹。
24.作为本发明的优选方案,所述导向轮部还包括:
25.设置于行走轮轴心处的轮轴,且轮轴由钛合金材质制成;
26.铝合金外壳,且铝合金外壳安装在轮轴端部;
27.轮式里程计,安装于所述铝合金外壳的外端;
28.磁铁,安装于所述轮轴端部内侧,且轮轴另一端螺纹连接有螺母端头,用于安装行走轮;
29.所述轮轴端部内侧开设有气道,且气道一端贯穿螺母端头,所述注气口一端与气道连通,所述气管与气道连通,且磁铁端部与气管转动连接;
30.所述微型气泵安装于第二折叠架上,且微型气泵的输出端与气管连通。
31.作为本发明的优选方案,所述电磁阀与控制器无线通信连接,且电磁阀的连接端设有纽扣电池;
32.所述轮式里程计和微型气泵均与蓄电池电性连接,所述轮式里程计和微型气泵均与控制器连接端电性连接;
33.所述轮式里程计和微型气泵与蓄电池的连接电路上通过导电滑环活动设置,所述轮式里程计和微型气泵与控制器的连接电路上通过导电滑环活动设置。
34.作为本发明的优选方案,所述轮式里程计的连接端设有编码器芯片,所述铝合金外壳内部设有电路板,且编码器芯片电性连接在电路板上,且轮式里程计数据传输至显示器显示,所述磁铁和编码器芯片外部之间设置磁屏蔽层;
35.所述编码器芯片输出端设有三极管阵列,用于放大和滤波电路,去除编码器芯片输出的毛刺干扰;
36.控制器采集编码器芯片输出的计数信号,并根据校准数据将其计算为标准的里程数据,通过can-fd总线输出;
37.多个轮式里程计通过can-fd总线组成can网络,同步采集和输出里程数据。
38.在上述技术方案中,本发明提供的技术效果和优点:
39.1、通过在延伸杆上旋动螺母件,调节对第一环套移动范围的限定,适应管道内径的大小,使导向轮部能够抵接在不同管道内壁上,配合压缩弹簧和拉伸弹簧的缓冲减震作用,装置遇到障碍时导向组件通过管道内壁给的压力自动调整角度,预紧力环形压力传感器感测第一环套承受压力,调节时使两侧的压力值相同,保证装置进入管道后能够有效支撑的同时,两侧受力相同,避免装置受力不均导致的摆动问题,提高装置在管道内移动的稳定性和安全性,且具有避障功能;
40.2、通过高精度里程计对行走轮行走里程进行记录,并计算出管道的三维位置,配合红外线摄像头、红外测距传感器感测测量主机与管道之间的距离,保证装置能够安全通过,且及时发现障碍物并作出调整,以避免装置卡死在管道内部,gps定位模块定位测量主机在管道内的位置,并通过测量主机内的信号发射器,将感测信号经过电力载波系统转换成电力信号,将信号传输至地面工作站的监测主机上,再由电力载波系统转换成数字信号传送至主控计算机,进行路径测量和视频采集,进行实时监测装置工作;
41.3、通过控制微型气泵工作,将金属滚珠顶出兜口,漏出行走轮表面,并在压力作用下与管壁接触,变硬摩擦为滚动摩擦,使导向轮部移动更灵活,当遇到局部挡板式障碍时,可通过扭转或甩动牵引钢丝绳将扭力传导至管线陀螺仪处,在单向轴承的限位方向上进行
扭转,从而让导向轮部避开障碍物后继续前进,且不会损伤牵引钢丝绳,气体排出进行泄压后,可以继续进行测量,当行走轮被异物缠绕卡死时,利用金属滚珠将管线陀螺仪拉出管道进行维护,且该结构便于更换维护,降低装置的维护成本。
附图说明
42.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
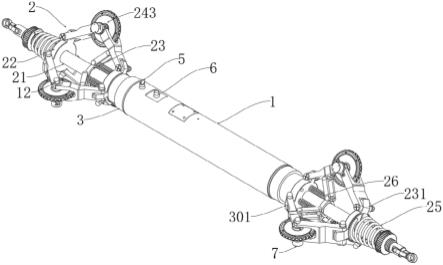
43.图1为本发明的整体结构立体图;
44.图2为本发明的整体结构主视图;
45.图3为本发明封闭端头、限位杆部和导向组件连接结构的侧视图;
46.图4为本发明图3中a-a剖面结构示意图;
47.图5为本发明行走机构的组合结构立体图;
48.图6为本发明行走机构的第一视角爆炸图;
49.图7为本发明行走机构的第二视角爆炸图;
50.图8为本发明导向轮部的立体图;
51.图9为本发明导向轮部的局部剖切立体图;
52.图10为本发明导向轮部的内部结构示意图;
53.图11为本发明环状罩壳的立体图;
54.图12为本发明轮式里程计、磁铁和轮轴的连接结构立体图;
55.图13为本发明轮式里程计、磁铁和磁屏蔽层的连接结构局部图;
56.图14为本发明里程信号传输系统图;
57.图15为本发明高精度里程计电路原理图。
58.附图标记说明:
59.测量主机-1;行走机构-2;封闭端头-3;预紧力环形压力传感器-4;红外线摄像头-5;红外测距传感器-6;轮式里程计-7;电磁阀-8;磁铁-9;轮轴-10;铝合金外壳-11;螺母端头-12;轮式里程计-7;编码器芯片-13;电路板-14;磁屏蔽层-15;
60.限位杆部-21;第一环套-22;第二环套-23;导向组件-24;压缩弹簧-25;拉伸弹簧-26;
61.滑杆-211;螺纹槽-212;螺栓头-213;延伸杆-214;螺母件-215;
62.凹槽-221;橡胶缓冲垫-222;金属垫片-223;
63.第二耳板-231;
64.第一折叠架-241;第二折叠架-242;导向轮部-243;支撑板-244;
65.第一耳板-301;
66.气道-101;气管-102;
67.平口-2141;销轴-2142;u形拉板-2143;安装扣-2144;
68.行走轮-2431;收纳槽-2432;缓冲弹簧-2433;环状罩壳-2434;容纳腔-2435;兜口-2436;金属滚珠-2437;环槽-2438;通气孔-2439;密封塞-2440;注气口-2441。
具体实施方式
69.为了使本领域的技术人员更好地理解本发明的技术方案,下面将结合附图对本发明作进一步的详细介绍。
70.本发明提供了如图1-11所示的一种管线陀螺仪,包括测量主机1和行走机构2,行走机构2的数量设置为两个,且两个行走机构2安装于测量主机1的两端,行走机构2远离测量主机1的一端连接牵引钢丝绳,行走机构2包括:
71.套接于测量主机1端部的封闭端头3,且封闭端头3与测量主机1的连接处设有密封垫圈,测量主机1结构为密封结构,避免水或者灰尘进入影响装置正常使用,封闭端头3远离测量主机1的一端设有限位杆部21,限位杆部21外部活动设置有第一环套22和第二环套23,且封闭端头3、第一环套22和第二环套23之间设有导向组件24,导向组件24用于将测量主机1在管道内支撑在轴心部位,且便于移动牵引测量主机1;
72.导向组件24包括第一折叠架241和第二折叠架242,且第二折叠架242套接于第一折叠架241外部,第一折叠架241和第二折叠架242之间转动连接有导向轮部243,第一折叠架241和第二折叠架242远离导向轮部243的端部分别连接在封闭端头3和第一环套22上,第一折叠架241与第一环套22之间设有支撑板244,支撑板244两端分别与第一折叠架241与第一环套22铰接,该结构便于组装和更换,支撑板244的长度可选择;
73.限位杆部21包括固定在封闭端头3轴心处的滑杆211,滑杆211另一端开设有螺纹槽212,螺纹槽212内螺纹连接有螺栓头213,且螺栓头213一端一体设置有延伸杆214,延伸杆214外表面设有外螺纹,且延伸杆214外部螺纹连接有螺母件215,延伸杆214具有多种规格可供选择,长度可控制,滑杆211外部且位于螺母件215与第一环套22之间的位置处设有压缩弹簧25,第一环套22与第二环套23之间设有拉伸弹簧26,导向组件24的高度可伸缩调节,实现不同内径管道的调节适用性,保证使用时装置移动的稳定性;
74.导向轮部243包括转动连接于第一折叠架241与第二折叠架242套接结构内侧的行走轮2431,行走轮2431外侧开设有若干均匀分布的收纳槽2432,收纳槽2432内设有缓冲弹簧2433,行走轮2431两侧边缘部位均通过螺丝固定安装有环状罩壳2434,且环状罩壳2434内侧设有容纳腔2435,环状罩壳2434外侧开设有兜口2436,容纳腔2435内设有多个金属滚珠2437,且多个金属滚珠2437分别与兜口2436和收纳槽2432一一对应,行走轮2431内部设有环槽2438,且收纳槽2432与环槽2438之间贯穿有通气孔2439,通气孔2439顶端和收纳槽2432底部活动连接有密封塞2440,环槽2438内设有贯穿行走轮2431的注气口2441,注气口2441的输入端设有微型气泵,环槽2438侧部开设有泄压孔,且泄压孔内设有电磁阀8,泄压孔用于在不需要使用金属滚珠2437时进行放气泄压,从而在缓冲弹簧2433和密封塞2440配合下将金属滚珠2437挤压回容纳腔2435内。
75.进一步的,在上述技术方案中,第一环套22靠近压缩弹簧25的一侧开设有凹槽221,且凹槽221内安装有橡胶缓冲垫222,螺母件215底部设有金属垫片223,橡胶缓冲垫222和金属垫片223对压缩弹簧25进行支撑,避免磨损螺母件215和第一环套22,且增大压缩弹簧25与接触面的摩擦,限制其转动;
76.压缩弹簧25设置为锥形弹簧,且锥形弹簧两端内径分别小于金属垫片223外径和缓冲垫外径,该锥形弹簧结构在其被挤压状态下能够套接并拢;
77.缓冲垫与凹槽221之间设有预紧力环形压力传感器4,预紧力环形压力传感器4的
连接端设有显示器,通过预紧力环形压力传感器4感测装置进入时的调节压力,保证装置进入管道后能够有效支撑的同时,具有安全的缓冲空间,提高装置在管道内移动的稳定性和安全性。
78.进一步的,在上述技术方案中,封闭端头3一端外侧固定连接有第一耳板301,第二环套23外侧固定连接有第二耳板231,且第一折叠架241和第二折叠架242上均设有与第一耳板301和第二耳板231匹配的槽口;
79.拉伸弹簧26设置为平弹簧,且拉伸弹簧26两端均固定连接有环形片,且两侧的环形片分别通过螺丝固定在封闭端头3和第二环套23上,便于拉伸弹簧26的安装使用,长时间使用后其弹性性能无法满足需求时便于进行更换。
80.进一步的,在上述技术方案中,延伸杆214远离滑杆211一端的两侧均开设有平口2141,且两侧平口2141之间贯穿有销孔,销孔内插接有销轴2142,滑杆211端部通过销轴2142铰接有u形拉板2143,u形拉板2143便于安装和更换;
81.u形拉板2143顶端通过单向轴承转动连接有安装扣2144,牵引钢丝绳固定在安装扣2144上,两侧的牵引钢丝绳连接到安装扣2144上用来牵拉装置,安装杆方便,且便于拆卸,利用单向轴承使u形拉板2143与安装扣2144之间可活动,避免牵引钢丝绳扭转受力,延长使用寿命,降低牵引钢丝绳断裂影响装置工作的情况,且单向轴承使牵引钢丝绳往一侧旋转时能够带动装置扭转,从而实现局部障碍物的避障。
82.进一步的,在上述技术方案中,滑杆211直径大于延伸杆214直径,且延伸杆214直径大于螺栓头213直径,在第一环套22移动时,减少螺纹对第一环套22内壁的阻碍,降低磨损,红外线摄像头5拍摄测量主机1所处位置处的画面情况,红外测距传感器6用于感测测量主机1与管道之间的距离,保证装置能够安全通过,且及时发现障碍物并作出调整,以避免装置卡死在管道内部。
83.进一步的,在上述技术方案中,还包括红外线摄像头5和红外测距传感器6,红外线摄像头5和红外测距传感器6均安装于测量主机1外侧;
84.测量主机1内部设有控制器,且控制器的连接端设有蓄电池,蓄电池的连接端设有充电口,用于充电使用,且充电口设有密封结构;
85.测量主机1上还设有gps定位模块,用于定位测量主机1在管道内的位置,且测量主机1内具有信号发射器,将感测信号传输至监测主机上,信号传输可通过无线传输,当管道深度较大或者存在干扰问题,无法通过无线传输时,可通过将复合电缆与牵引钢丝绳同步牵拉,实现信号的传输;
86.红外线摄像头5、红外测距传感器6和gps定位模块均与蓄电池电性连接,红外线摄像头5、红外测距传感器6和gps定位模块均与控制器的输入端电性连接。
87.进一步的,在上述技术方案中,支撑板244的数量设置为多组,且每组支撑板244设置为两个,两个支撑板244平行分布,且两个支撑板244之间的距离大于导向轮部243厚度,两个支撑板244之间的缝隙能够使导向轮部243通过,且进一步的导向轮部243收缩状态下其轮轴10部位被挡住,从而避免使行走轮2431抵接在滑杆211表面,从而影响行走轮2431的灵活转动;
88.环状罩壳2434由铝合金材质制成,使用钛合金材质可以防止磁信号被屏蔽,也比普通的铝合金材质更耐磨,且环状罩壳2434外侧设有用于防止打滑的滚花纹。
89.如图12-13所示,导向轮部243还包括:
90.设置于行走轮2431轴心处的轮轴10,且轮轴10由钛合金材质制成;
91.铝合金外壳11,且铝合金外壳11安装在轮轴10端部;
92.轮式里程计7,安装于铝合金外壳11的外端,轮式里程计7能够计算行走轮2431转数,从而计算出装置在管道内前行的距离,且轮式里程计7便于归零设置;
93.本方案中的轮式里程计7设置为高精度里程计,且其采用磁编码芯片作为传感输入,相比于传统的光电里程计,具有体积小、精度高、抗干扰、无毛刺等特点,内置温度校准和里程校准,能够直接输出数字化的里程数据;且通信总线采用can-fd网络通信,多个里程计可挂载在一条总线上传输,同步采集和输出里程数据;
94.如图15所示,轮式里程计7供电采用5v供电,使用xc6206p33电源芯片将5v转换成3v3给磁编码器芯片和微控制器芯片供电,其中磁编码器芯片采用mt6825芯片,微控制器采用gd32c103tbu6芯片;mt6825的输出abz信号经过三极管放大和rc滤波电路,可去除磁编码器芯片输出的毛刺干扰;
95.gd32c103tbu6采集编码器输出的pwm计数信号,微控制器内部的flash存储有温度校准和里程校准数据,根据校准数据将计数信号计算为标准的里程数据,最终通过can-fd总线输出;三个里程计可通过can-fd总线组成can-fd网络,同步采集和输出里程计数据;
96.xc6206p332mr芯片引脚1连接电源地gnd,引脚2连接3v3,引脚3连接电源输入5v,引脚1、2之间放置10uf电容,引脚1,3之间放置100uf电容;
97.mt6825芯片的引脚4、10、12连接电源地gnd,引脚9连接3v3,14、15、16脚连接三极管阵列;
98.三极管阵列由3个1k电阻、3个4.7k电阻、3个lmbt3904tt1g三极管组成,如图15所示1k电阻一端连接mt6825输出,另一端连接lmbt3904tt1g的引脚1;lmbt3904tt1g的引脚2连接电源地gnd,引脚3连接4.7k电阻,电阻另一端连接3v3;lmbt3904tt1g的引脚3作为三极管阵列的输出;
99.rc滤波电路由3个220r电阻和3个100pf电容组成,220r电阻一端连接三极管阵列,另一端连接100pf电容的一个引脚,电容另一个引脚接地;电阻和电容连接的一端作为输出;
100.gd32c103tbu6引脚1、6、19、27连接3v3,引脚5、18、26、36连接gnd,引脚8、9、10连接rc滤波电路;引脚4通过10k电阻连接3v3,并连接100nf电容接gnd,引脚35通过1k电阻连接gnd;引脚23和24分别连接tja1042t/3芯片的引脚4、引脚1;
101.tja1042t/3芯片的引脚2连接gnd,引脚3连接5v,引脚5通过0欧电阻连接3v3,引脚6、7连接到can-fd网络,引脚8通过10k电阻后接地;
102.磁铁9,安装于轮轴10端部内侧,且轮轴10另一端螺纹连接有螺母端头12,用于安装行走轮2431;
103.轮轴10端部内侧开设有气道101,且气道101一端贯穿螺母端头12,注气口2441一端与气道101连通,气管102与气道101连通,且磁铁9端部与气管102转动连接;
104.微型气泵安装于第二折叠架242上,且微型气泵的输出端与气管102连通。
105.进一步的,在上述技术方案中,电磁阀8与控制器无线通信连接,且电磁阀8的连接端设有纽扣电池,通过控制器控制电磁阀8打开即可快速实现泄压;
106.轮式里程计7和微型气泵均与蓄电池电性连接,轮式里程计7和微型气泵均与控制器连接端电性连接;
107.轮式里程计7和微型气泵与蓄电池的连接电路上通过导电滑环活动设置,轮式里程计7和微型气泵与控制器的连接电路上通过导电滑环活动设置,使轮式里程计7和微型气泵与蓄电池或控制器电性连接的同时,行走轮2431轴心处的轮轴10转动不影响电线布设,不会出现线路缠绕故障的问题。
108.如图13-14所示,轮式里程计7的连接端设有编码器芯片13,铝合金外壳11内部设有电路板14,且编码器芯片13电性连接在电路板14上,且轮式里程计7数据传输至显示器显示,磁铁9和编码器芯片13外部之间设置磁屏蔽层15,磁屏蔽层可有效防止外部磁场干扰轮式里程计7工作;
109.编码器芯片13输出端设有三极管阵列,用于放大和滤波电路,去除编码器芯片13输出的毛刺干扰;
110.控制器采集编码器芯片13输出的计数信号,并根据校准数据将其计算为标准的里程数据,通过can-fd总线输出;
111.多个轮式里程计7通过can-fd总线组成can网络,同步采集和输出里程数据。
112.本发明提供的管线陀螺仪在工作时:
113.先将一端的牵引钢丝绳穿过待检测的管道,然后将其与管线陀螺仪一端的安装扣2144连接,装置另一端的安装扣2144与具有收卷辊的牵引钢丝绳连接,随后将管线陀螺仪放置在管道内部,此时第一折叠架241与第二折叠架242的折叠结构被挤压展开,第一环套22在滑杆211上滑动并压缩压缩弹簧25,通过在延伸杆214上旋动螺母件215,调节对第一环套22移动范围的限定,适应管道内径的大小,使导向轮部243能够抵接在不同管道内壁上,配合压缩弹簧25和拉伸弹簧26的缓冲减震作用,装置进入管道内,遇到障碍时收缩或者展开,导向组件24通过管道内壁给的压力自动调整角度,使向轮部243始终贴合在管道内壁上,配合预紧力环形压力传感器4感测第一环套22承受压力,调节时使两侧的压力值相同,装置进入管道后能够有效支撑,两侧受力相同,装置被拉动牵引后在管道内稳定移动;
114.牵引钢丝绳牵拉装置在管道内向前移动,在进入管道时将轮式里程计7进行归零设置,对行走轮2431行走里程进行记录,并计算出管道的三维位置,配合红外线摄像头5拍摄测量主机1所处位置处的画面情况,红外测距传感器6感测测量主机1与管道之间的距离,保证装置能够安全通过,且及时发现障碍物并作出调整,以避免装置卡死在管道内部,gps定位模块定位测量主机1在管道内的位置,并通过测量主机1内的信号发射器,将感测信号经过电力载波系统转换成电力信号,将信号传输至地面工作站的监测主机上,再由电力载波系统转换成数字信号传送至主控计算机,进行路径测量和视频采集,进行实时监测装置工作;
115.当管线陀螺仪行进中遇到障碍(如坡面较大的凸起或者行走轮2431被异物缠绕卡死时),使管线陀螺仪无法被牵引行进,此时通过控制微型气泵工作,经气道101和气管102传输至注气口2441注入气体,经环槽2438流经多个通气孔2439中,从而使密封塞2440在收纳槽2432中移动并压缩缓冲弹簧2433,将金属滚珠2437顶出兜口2436,漏出行走轮2431表面,并在压力作用下与管壁接触,变硬摩擦为滚动摩擦,使导向轮部243移动更灵活,当遇到局部挡板式障碍时,可通过扭转或甩动牵引钢丝绳将扭力传导至管线陀螺仪处,在单向轴
承的限位方向上进行扭转,从而让导向轮部243避开障碍物后继续前进,此时可通过控制电磁阀8打开,将行走轮2431内密闭空间内的气体排出,进行泄压,从而在缓冲弹簧2433以及管壁的挤压下使金属滚珠2437缩回容纳腔2435内,继续进行测量;当行走轮2431被异物缠绕卡死时,此时测量受限,直接将金属滚珠2437顶出兜口2436并拉出管道进行维护。
116.以上只通过说明的方式描述了本发明的某些示范性实施例,毋庸置疑,对于本领域的普通技术人员,在不偏离本发明的精神和范围的情况下,可以用各种不同的方式对所描述的实施例进行修正。因此,上述附图和描述在本质上是说明性的,不应理解为对本发明权利要求保护范围的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1