一种辐射源定位模型的训练方法、装置及辐射源定位方法、装置与流程
本发明属于辐射源定位,特别涉及该领域中的一种辐射源定位模型的训练方法、装置及辐射源定位方法、装置。
背景技术:
1、指纹定位技术分为离线阶段和在线阶段,其中,离线阶段中预先在目标区域内的各个位置依次设置辐射源,然后针对每一个辐射源位置,分别利用接收机在预设的位置测量辐射源的接收信号强度(rssi),方位角(aoa),将接收信号强度以及方位角作为辐射源的指纹数据。在线阶段,即进行辐射源定位过程中,将接收机采集到的数据与相同位置接收机在离线阶段采集到的数据以某种算法进行匹配,根据匹配程度确定辐射源可能的位置。指纹定位的方法由于精度高被广泛地应用于室内定位中。
2、但是在室外定位中,因为室外场景较室内场景面积过大,离线阶段进行数据采集将会消耗大量的人力和物力,因此,现有技术存在指纹定位方法并不适用于室外定位的技术问题。
3、现有技术中申请号为cn201310348033.0的发明专利申请公开了一种指纹定位方法与服务器,通过并行处理数据库建立与更新过程,避免了传统指纹方法因先要人为建立指纹库而导致的人力、物力大量消耗,不足之处是数据采集过程仍是人为进行,依旧无法适用于室外大规模场景。
技术实现思路
1、本发明所要解决的技术问题就是克服现有指纹定位无法应用于室外场景的缺点,提供一种辐射源定位模型的训练方法、装置及辐射源定位方法、装置。
2、本发明采用如下技术方案:
3、一种辐射源定位模型的训练方法,其改进之处在于,包括如下步骤:
4、步骤1,基于目标区域的三维点云,利用平面提取方法构建出目标区域的三维模型;
5、步骤2,在三维模型中,设置辐射源点位以及接收机点位;针对每一种辐射源点位和接收机点位的组合,利用镜像法计算接收机点位接收的模拟指纹数据,所述模拟指纹数据包括接收信号强度和/或方位角;
6、步骤3,将每一种辐射源点位和接收机点位的组合对应的辐射源点位坐标、接收机点位坐标以及模拟指纹数据作为样本,得到样本集;利用样本集训练预先搭建的多层感知机模型,得到辐射源定位模型。
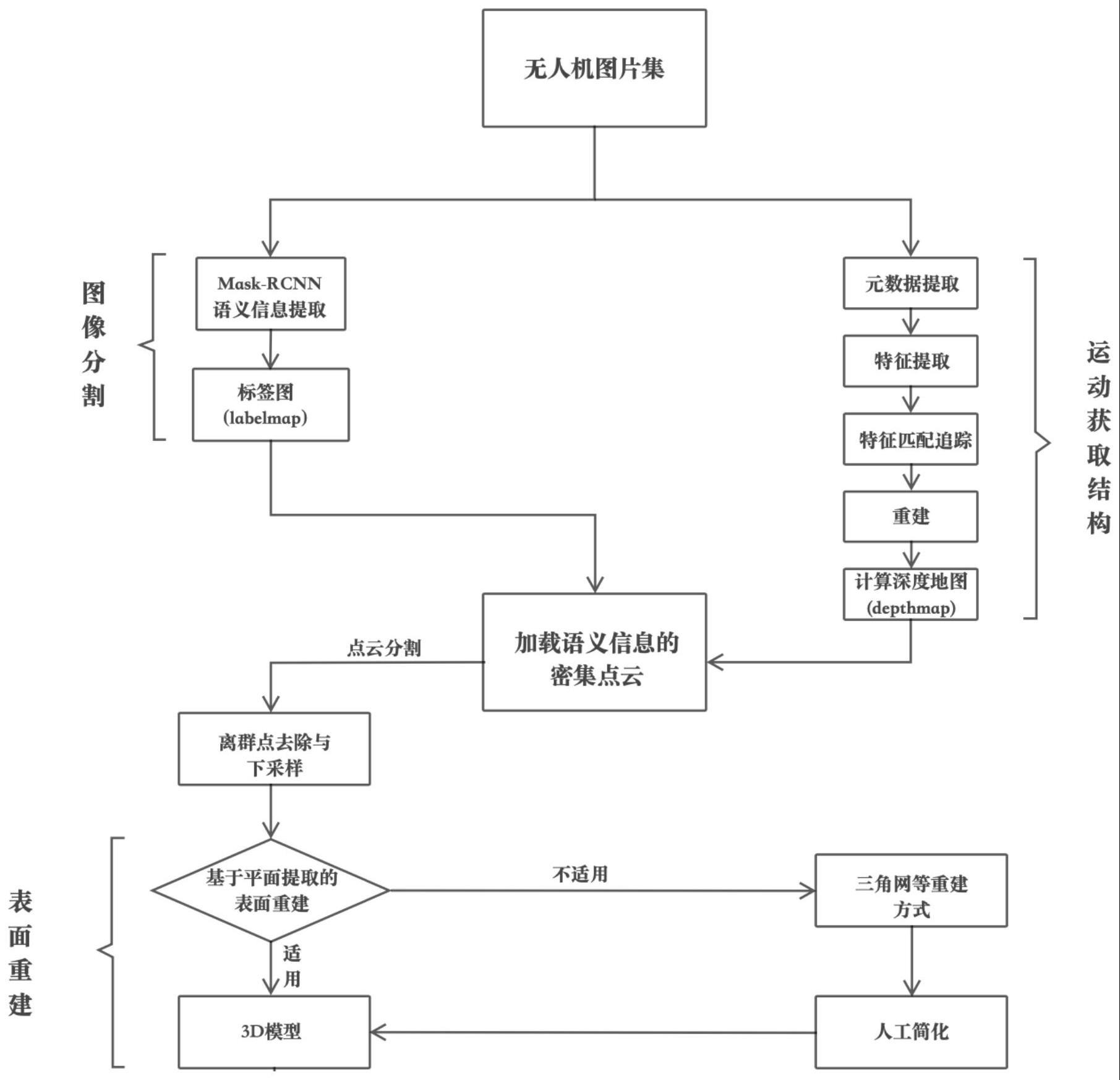
7、进一步的,所述步骤1包括:
8、利用无人机拍摄目标区域中的多视角光学图像,构建目标区域的三维点云模型;
9、利用预先训练的rcnn网络模型识别出目标区域光学图像中包含的物体特征,将识别出的物体特征与三维点云模型进行匹配,得到每一个物体特征的点云数据;
10、将物体特征作为语义信息标记对应的点云数据,得到标记后的三维点云模型;再对标记后的三维点云模型进行下采样,得到稠密点云模型,再利用平面提取方法构建三维点云模型中各个物体的三维模型,得到目标区域的三维模型。
11、进一步的,利用平面提取方法构建三维点云模型中各个物体的三维模型,包括:
12、根据稠密三维点云中每一点的深度信息,提取出点云中各点所处平面;将每一个平面进行二维扩张处理,得到候选平面;根据各个候选平面之间的几何关系获取由候选平面封闭的空间模型。
13、进一步的,所述步骤2包括:
14、将第一数量个接收机同时布设在目标区域的三维模型中,得到若干种接收机点位分布;
15、针对每一种接收机点位分布,将辐射源布设在辐射源点位上,利用镜像法计算入射的传播路径及反射的传播路径,所述反射包括一次反射和二次反射;根据所述入射的传播路径及反射的传播路径,利用射线追踪方法计算接收机点位接收的模拟指纹数据,将第一数量个接收机测量的模拟指纹数据、接收机点位坐标以及辐射源点位坐标作为样本;更改辐射源点位的坐标,并返回重新执行本段“将辐射源布设在辐射源点位上”之后的步骤,直至各个辐射源点位都被遍历。
16、进一步的,步骤3中的多层感知机模型包括:输入层、第二数量个隐藏层和第一输出层,其中,每一个隐藏层由一个激活函数为tanh的dense层和batchnorm层组成;第一输出层为激活函数为sigmoid的dense层。
17、进一步的,还包括步骤4:
18、在目标区域中布设实际辐射源以及实际接收机,使用实际接收机测量实际辐射源的实际指纹数据,利用实际辐射源的点位、实际接收机的点位以及对应的实际指纹数据组成实训样本集,其中,实际指纹数据少于模拟指纹数据;
19、在辐射源定位模型的第一输出层之后设置第二输出层,得到修正模型,其中,第一输出层节点分别连接到第二输出层节点上;
20、利用实训样本集训练修正模型中第一输出层与第二输出层之间的连接权重,直至修正模型收敛,得到训练后的修正模型。
21、一种辐射源定位模型的训练装置,供上述训练方法使用,其改进之处在于,包括:
22、构建模块,用于基于目标区域的三维点云,利用平面提取方法构建出目标区域的三维模型;
23、计算模块,用于在三维模型中,设置辐射源点位以及接收机点位;针对每一种辐射源点位和接收机点位的组合,利用镜像法计算入射的传播路径及反射的传播路径,所述反射包括:一次反射以及二次反射;根据所述入射的传播路径及反射的传播路径,利用射线追踪方法计算接收机点位接收的模拟指纹数据,所述模拟指纹数据包括接收信号强度和/或方位角;
24、训练模块,用于将每一种辐射源点位和接收机点位的组合对应的辐射源点位坐标、接收机点位坐标以及模拟指纹数据作为样本,得到样本集;利用样本集训练预先搭建的多层感知机模型,得到辐射源定位模型。
25、一种辐射源定位方法,其改进之处在于:将接收机在真实目标区域中的待测指纹数据输入到上述任一项所得的辐射源定位模型中,得到接收机的坐标。
26、一种辐射源定位装置,其改进之处在于:用于将接收机在真实目标区域中的待测指纹数据输入到上述任一项所得的辐射源定位模型中,得到接收机的坐标。
27、本发明的有益效果是:
28、本发明所公开的训练方法及训练装置,通过在传统地理测绘的基础上赋予模型电磁介质属性(电磁测绘),使得测绘模型可以用来进行电磁计算,从而可以通过仿真的手段自由获取目标区域的rssi分布,解决了指纹定位无法应用于室外复杂环境的问题。
29、本发明所公开的训练方法,考虑到了现实复杂环境造成的多径效应,提高了室外指纹定位的精度。利用电磁计算获得的数据代替传统指纹定位中离线阶段采集的数据,训练多层感知机模型进行定位,实验结果表明,本训练方法极具可行性且所得辐射源定位模型的定位精度较高。
技术特征:
1.一种辐射源定位模型的训练方法,其特征在于,包括如下步骤:
2.根据权利要求1所述辐射源定位模型的训练方法,其特征在于,所述步骤1包括:
3.根据权利要求2所述辐射源定位模型的训练方法,其特征在于,利用平面提取方法构建三维点云模型中各个物体的三维模型,包括:
4.根据权利要求1所述辐射源定位模型的训练方法,其特征在于,所述步骤2包括:
5.根据权利要求1所述辐射源定位模型的训练方法,其特征在于,步骤3中的多层感知机模型包括:输入层、第二数量个隐藏层和第一输出层,其中,每一个隐藏层由一个激活函数为tanh的dense层和batchnorm层组成;第一输出层为激活函数为sigmoid的dense层。
6.根据权利要求1所述辐射源定位模型的训练方法,其特征在于,还包括步骤4:
7.一种辐射源定位模型的训练装置,供权利要求1所述训练方法使用,其特征在于,包括:
8.一种辐射源定位方法,其特征在于:将接收机在真实目标区域中的待测指纹数据输入到权利要求1—7中任一项所得的辐射源定位模型中,得到接收机的坐标。
9.一种辐射源定位装置,其特征在于:用于将接收机在真实目标区域中的待测指纹数据输入到权利要求1—7中任一项所得的辐射源定位模型中,得到接收机的坐标。
技术总结
本发明公开了一种辐射源定位模型的训练方法、装置及辐射源定位方法、装置,该训练方法包括如下步骤:步骤1,基于目标区域的三维点云,利用平面提取方法构建出目标区域的三维模型;步骤2,在三维模型中,设置辐射源点位以及接收机点位;步骤3,将每一种辐射源点位和接收机点位的组合对应的辐射源点位坐标、接收机点位坐标以及模拟指纹数据作为样本,得到样本集。本发明所公开的训练方法及训练装置,通过在传统地理测绘的基础上赋予模型电磁介质属性(电磁测绘),使得测绘模型可以用来进行电磁计算,从而可以通过仿真的手段自由获取目标区域的RSSI分布,解决了指纹定位无法应用于室外复杂环境的问题。
技术研发人员:左伟庆,程尧,夏国臻,张富彬,赵军,冯阳,郭琛
受保护的技术使用者:中国电波传播研究所(中国电子科技集团公司第二十二研究所)
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!