电位器导电塑料电阻体加工用自动化铆接系统的制作方法
本发明涉及一种电位器(传感器)导电塑料电阻体加工设备,尤其涉及一种电位器导电塑料电阻体加工用自动化铆接系统,属于电位器(传感器)生产。
背景技术:
1、电位器(传感器)是各型号伺服机构配套产品,用于伺服机构作动器位移测量及反馈。直线位移电位器(传感器)被广泛用作伺服系统控制器件、电路调整器件,在运载火箭、导弹及其发射车、飞机、船舶、兵器、坦克等系统的伺服机构随动系统中得到广泛应用。
2、电阻体是电位器(传感器)的重要部件之一,目前应用最多的是导电塑料电阻体,为了尽量提高检测精度,电阻体的各个加工环节都非常重要,其中将引线与电阻体连接的环节也非常重要,连接不好则会导致接触电阻增大而降低电位器的检测精度。
3、导电塑料电阻体与引线连接需要先后采用铆接、粘接、钎焊的工艺完成,其中铆接工艺发挥关键作用。由于电位器多为定制化产品,结合使用场景,结构设计各不相同,造成其使用的电阻体的形状和尺寸也不尽相同。
4、考虑各类电阻体的外形、材料及使用环境,目前导电塑料电阻体的铆接工艺主要采用人工铆接方式进行,铆接设备的铆接力大小、铆头与铆钉对正等均由人为控制,操作者在铆接时需要不断调整铆接行程来满足铆接要求。这种人工铆接方式存在如下缺陷:铆接力大小由人工保证,铆接力无法量化;铆头与铆钉对正由人工目测保证,对中性操作难度大,对员工操作技能要求高;质量一致性不稳定,对检验人员要求高;生产效率低。
技术实现思路
1、本发明的目的就在于为了解决上述问题而提供一种电位器导电塑料电阻体加工用自动化铆接系统。
2、本发明通过以下技术方案来实现上述目的:
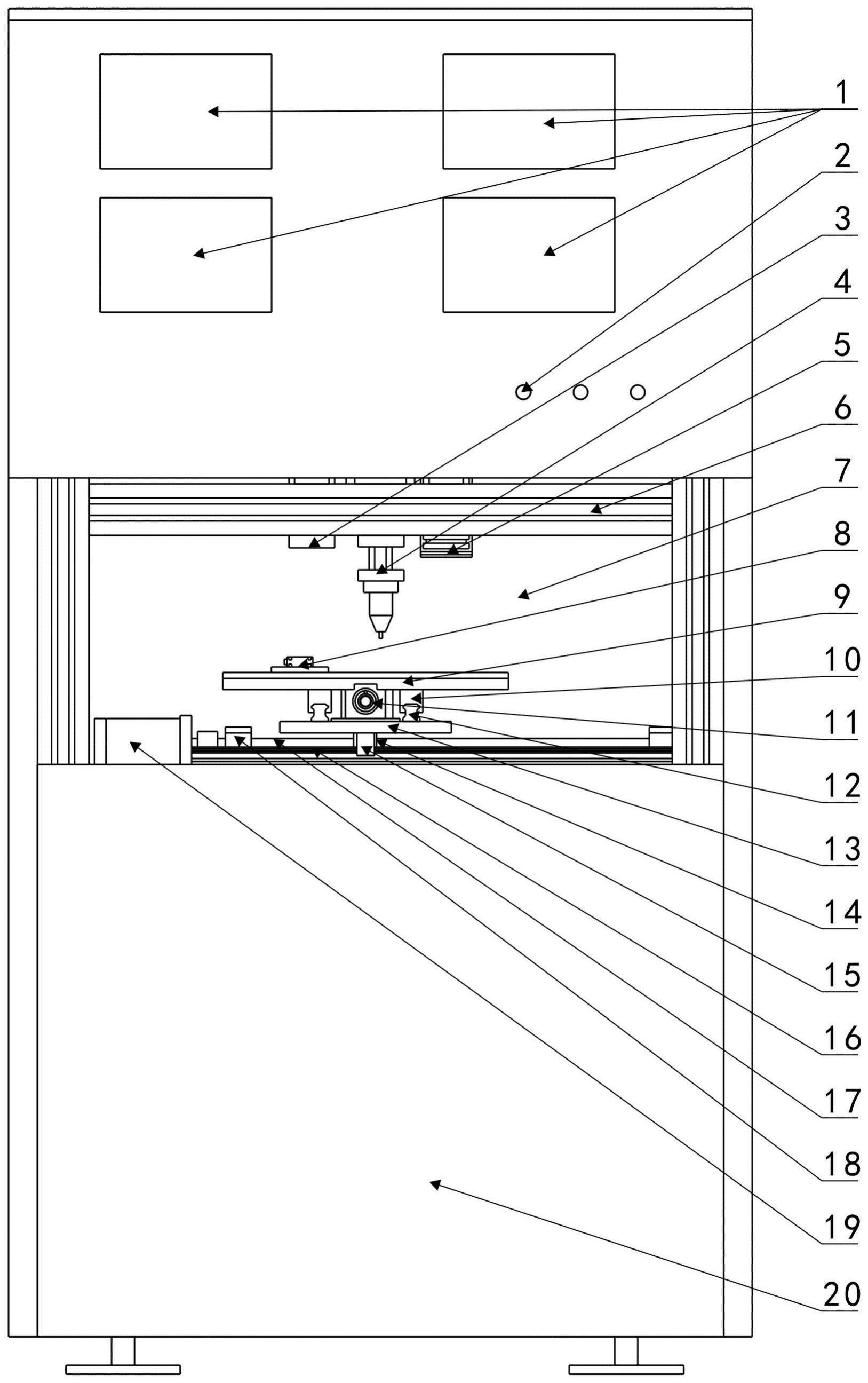
3、一种电位器导电塑料电阻体加工用自动化铆接系统,包括基座和铆接装置,所述基座上设有操作内腔,所述铆接装置通过主支架安装在所述基座上并位于所述操作内腔的上部,所述电位器导电塑料电阻体加工用自动化铆接系统还包括电阻体安装板、安装板驱动机构、定位相机、检测相机和控制器,所述安装板驱动机构包括第一导向滑轨、第一导向滑块、第一驱动电机、第一螺杆、第一螺母座、安装底板、第二导向滑轨、第二导向滑块、第二驱动电机、第二螺杆和第二螺母座,横向且相互平行的两个所述第一导向滑轨安装在所述操作内腔的底部,两个所述第一导向滑块安装在所述安装底板的底部并分别通过自身底部的滑槽安装在两个所述第一导向滑轨上,所述第一驱动电机安装在所述操作内腔的底部并靠近两个所述第一导向滑轨的一端,所述第一驱动电机的转轴与位于两个所述第一导向滑轨之间的所述第一螺杆连接,所述第一螺杆与所述第一导向滑轨相互平行且其两端分别通过第一轴承座安装在所述操作内腔的底部,所述第一螺母座安装在所述安装底板的底部并通过自身的螺纹通孔套装在所述第一螺杆上,横向且相互平行的两个所述第二导向滑轨安装在所述安装底板的上面,所述第二导向滑轨与所述第一导向滑轨相互垂直,两个所述第二导向滑块安装在所述电阻体安装板的底部并分别通过自身底部的滑槽安装在两个所述第二导向滑轨上,所述第二驱动电机安装在所述安装底板的上面并靠近两个所述第二导向滑轨的一端,所述第二驱动电机的转轴与位于两个所述第二导向滑轨之间的所述第二螺杆连接,所述第二螺杆与所述第二导向滑轨相互平行且其两端分别通过第二轴承座安装在所述安装底板的上面,所述第二螺母座安装在所述电阻体安装板的底部并通过自身的螺纹通孔套装在所述第二螺杆上,所述定位相机和所述检测相机分别安装在所述主支架上并分别位于所述铆接装置的两侧,所述定位相机、所述检测相机和所述铆接装置均位于所述电阻体安装板的上方,所述定位相机的信号输出端和所述检测相机的信号输出端分别与所述控制器的信号输入端对应连接,所述铆接装置的控制输入端、所述第一驱动电机的控制输入端和所述第二驱动电机的控制输入端分别与所述控制器的控制输出端对应连接。
4、作为优选,为了利用气缸实现高效铆接,所述铆接装置包括铆接气缸和铆接头,所述铆接气缸通过铆接安装板安装在所述主支架上,所述铆接气缸的主轴的轴向为竖向且其下端与所述铆接头连接,所述铆接气缸的控制输入端与所述控制器的控制输出端对应连接。
5、作为优选,为了检测铆接气缸的主轴位移量和铆接压力以利于更加精确的控制铆接质量,所述铆接装置还包括位移传感器和压力传感器,所述位移传感器安装在所述铆接气缸上并用于检测其主轴移动的位移量,所述压力传感器安装在所述铆接头与所述主轴之间并用于检测所述铆接头的铆接压力,所述位移传感器的信号输出端和所述压力传感器的信号输出端分别与所述控制器的信号输入端对应连接。
6、作为优选,为了对铆接气缸的主轴实现更好的导向功能,所述铆接装置还包括连接板和导向杆,横向的所述连接板与所述主轴的下部连接,两个竖向的导向杆的下端分别与所述连接板连接,两个所述导向杆的上端分别穿过所述铆接安装板上对应的导向通孔。
7、作为优选,为了实现对电阻体的高效自动化夹持功能并适应不同形状和尺寸电阻体的夹持需求,所述电阻体安装板的上表面上设有用于安装电阻体的安装沉槽,所述电阻体安装板的上表面上位于所述安装沉槽旁边的位置安装有夹持气缸,所述夹持气缸的推杆与“l”形推板的竖板连接,所述“l”形推板的横板置于所述安装沉槽内。
8、作为优选,为了提高摄像清晰度,所述定位相机和所述检测相机均为ccd相机且其下端设有光源。
9、本发明的有益效果在于:
10、本发明通过设置配套的双向驱动机构并通过控制器实现自动化控制,使导电塑料电阻体的铆接工序依次经过自动识别、自动定位、自动铆接、自动检测的自动化流程,铆接力大小由铆接气缸自动控制,铆接头与铆钉对正由定位相机、安装板驱动机构和控制器共同自动控制,铆接质量通过检测相机获取数据由控制器采用现有图像识别和对比技术自动完成,显著提升了铆接质量、铆接效率和质检效率。
技术特征:
1.一种电位器导电塑料电阻体加工用自动化铆接系统,包括基座和铆接装置,所述基座上设有操作内腔,所述铆接装置通过主支架安装在所述基座上并位于所述操作内腔的上部,其特征在于:所述电位器导电塑料电阻体加工用自动化铆接系统还包括电阻体安装板、安装板驱动机构、定位相机、检测相机和控制器,所述安装板驱动机构包括第一导向滑轨、第一导向滑块、第一驱动电机、第一螺杆、第一螺母座、安装底板、第二导向滑轨、第二导向滑块、第二驱动电机、第二螺杆和第二螺母座,横向且相互平行的两个所述第一导向滑轨安装在所述操作内腔的底部,两个所述第一导向滑块安装在所述安装底板的底部并分别通过自身底部的滑槽安装在两个所述第一导向滑轨上,所述第一驱动电机安装在所述操作内腔的底部并靠近两个所述第一导向滑轨的一端,所述第一驱动电机的转轴与位于两个所述第一导向滑轨之间的所述第一螺杆连接,所述第一螺杆与所述第一导向滑轨相互平行且其两端分别通过第一轴承座安装在所述操作内腔的底部,所述第一螺母座安装在所述安装底板的底部并通过自身的螺纹通孔套装在所述第一螺杆上,横向且相互平行的两个所述第二导向滑轨安装在所述安装底板的上面,所述第二导向滑轨与所述第一导向滑轨相互垂直,两个所述第二导向滑块安装在所述电阻体安装板的底部并分别通过自身底部的滑槽安装在两个所述第二导向滑轨上,所述第二驱动电机安装在所述安装底板的上面并靠近两个所述第二导向滑轨的一端,所述第二驱动电机的转轴与位于两个所述第二导向滑轨之间的所述第二螺杆连接,所述第二螺杆与所述第二导向滑轨相互平行且其两端分别通过第二轴承座安装在所述安装底板的上面,所述第二螺母座安装在所述电阻体安装板的底部并通过自身的螺纹通孔套装在所述第二螺杆上,所述定位相机和所述检测相机分别安装在所述主支架上并分别位于所述铆接装置的两侧,所述定位相机、所述检测相机和所述铆接装置均位于所述电阻体安装板的上方,所述定位相机的信号输出端和所述检测相机的信号输出端分别与所述控制器的信号输入端对应连接,所述铆接装置的控制输入端、所述第一驱动电机的控制输入端和所述第二驱动电机的控制输入端分别与所述控制器的控制输出端对应连接。
2.根据权利要求1所述的电位器导电塑料电阻体加工用自动化铆接系统,其特征在于:所述铆接装置包括铆接气缸和铆接头,所述铆接气缸通过铆接安装板安装在所述主支架上,所述铆接气缸的主轴的轴向为竖向且其下端与所述铆接头连接,所述铆接气缸的控制输入端与所述控制器的控制输出端对应连接。
3.根据权利要求2所述的电位器导电塑料电阻体加工用自动化铆接系统,其特征在于:所述铆接装置还包括位移传感器和压力传感器,所述位移传感器安装在所述铆接气缸上并用于检测其主轴移动的位移量,所述压力传感器安装在所述铆接头与所述主轴之间并用于检测所述铆接头的铆接压力,所述位移传感器的信号输出端和所述压力传感器的信号输出端分别与所述控制器的信号输入端对应连接。
4.根据权利要求2所述的电位器导电塑料电阻体加工用自动化铆接系统,其特征在于:所述铆接装置还包括连接板和导向杆,横向的所述连接板与所述主轴的下部连接,两个竖向的导向杆的下端分别与所述连接板连接,两个所述导向杆的上端分别穿过所述铆接安装板上对应的导向通孔。
5.根据权利要求1-4中任何一项所述的电位器导电塑料电阻体加工用自动化铆接系统,其特征在于:所述电阻体安装板的上表面上设有用于安装电阻体的安装沉槽,所述电阻体安装板的上表面上位于所述安装沉槽旁边的位置安装有夹持气缸,所述夹持气缸的推杆与“l”形推板的竖板连接,所述“l”形推板的横板置于所述安装沉槽内。
6.根据权利要求1-4中任何一项所述的电位器导电塑料电阻体加工用自动化铆接系统,其特征在于:所述定位相机和所述检测相机均为ccd相机且其下端设有光源。
技术总结
本发明公开了一种电位器导电塑料电阻体加工用自动化铆接系统,包括基座、铆接装置、电阻体安装板、安装板驱动机构、定位相机、检测相机和控制器,基座上设有操作内腔,铆接装置安装在基座上,安装板驱动机构包括第一导向滑轨、第一导向滑块、第一驱动电机、第一螺杆、第一螺母座、安装底板、第二导向滑轨、第二导向滑块、第二驱动电机、第二螺杆和第二螺母座,定位相机和检测相机分别位于铆接装置的两侧,定位相机、检测相机、铆接装置、第一驱动电机和第二驱动电机分别与控制器对应连接。本发明使导电塑料电阻体的铆接工序依次经过自动识别、自动定位、自动铆接、自动检测的自动化流程,显著提升了铆接质量、铆接效率和质检效率。
技术研发人员:于四辉,鲍红军,蒋玲,胡佑朴,李松涛,谭爽
受保护的技术使用者:成都宏明电子股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!