一种基于磁性传感器的障碍物后方探测方法
本发明属于传感器,具体涉及一种基于磁性传感器的障碍物后方探测方法。
背景技术:
1、障碍物后方探测设备可以在一定程度上实现在障碍物后方的生命探测以及目标探测,十分适用于当前军事发展、反恐斗争以及救援行动的需求,比如在部队的作战行动中,经常需要在隐蔽的建筑物后对目标进行实时检测、定位与跟踪。
2、常见的障碍物后方探测方式包括基于光学的探测器、基于超声波的探测器、穿墙探测雷达等,其中:
3、1)基于光学的探测器对人体感应非常有效,但它需要清晰的目标视线。这意味着对于建筑物内的目标探测,目标必须位于不被遮挡的位置,例如在窗户附近;
4、2)基于超声波的探测器虽然有一定的穿透能力,但其易受噪声和温度影响,在分层介质中传播衰减严重,穿透性差,并不适用于强调精确性的军事领域;
5、3)穿墙探测雷达通常通过发送超宽带信号来穿透障碍物,并根据接收数据进行相关处理,实现对障碍物后隐藏目标的检测。但受限于电磁波的物理特性,穿墙探测雷达穿透金属能力十分差,只适用于对非金属介质后方进行探测,这使得其在金属环境中的探测十分困难。
6、此外,有研究显示新型的基于wifi的无源雷达可以克服电磁波存在的高成本,大功耗,复杂的发射机/接收机设计等问题。但其过度依赖建筑内的wifi接入点,导致无法胜任未知环境下的探测。
7、通常障碍物后方探测仅在墙体后进行单台部署,以探测墙后目标的信息,具有一定的局限性,例如当目标存在遮挡时,由于回波较弱而丢失目标。另一方面,单台探测区域有限,因此区域中存在探测盲区。因而,组网穿墙探测的概念被提出,其实现方法是在墙体的一侧部署多台探测器或者是在同一建筑物的不同墙体分别部署多台探测器,通过多角度观察目标得到的更多信息,可以降低虚假目标出现的概率,增加被物体掩盖或相互遮挡目标的检测概率,融合多个阵列的数据以获得目标更多维度的信息。
8、综合以上研究背景,传统的障碍物后方探测方式存在障碍物遮断性强的问题,无法实现有效的目标探测,特别是对金属障碍物后方的探测能力极度受限。同时,传统单台障碍物后方探测器存在探测盲区等问题,相较而言,实现障碍物后方探测器组网探测则能有效解决以上问题。因此,提出新型的障碍物后方探测方法及系统,特别是考虑到在城市反恐及其他军事应用障碍物后方探测环境中,目标通常携带铁磁性材料隐蔽性武器,如刀具、枪械等,实现金属障碍物后方目标探测,特别是障碍物后面磁性目标的识别,是亟待解决的问题。
技术实现思路
1、为了克服现有技术的不足,本发明提供了一种基于磁性传感器的障碍物后方探测方法,通过磁性传感器检测墙体等障碍物后方目标附近磁场信息,再根据所获磁场信息计算障碍物后方目标的位置、特征磁矩等信息;采用单个磁性传感器,用于测量墙体等障碍物后方目标附近的磁场三维矢量强度;采用磁性传感器阵列,用于测量墙体等障碍物后方目标附近的磁梯度张量,对目标进行定位。采用本发明进行探测,可以很好地探测金属介质后的目标。此外,本发明还可以通过组网探测,有效解决传统单节点障碍物后方探测存在的探测盲区、目标遮挡等问题。
2、本发明解决其技术问题所采用的技术方案包括如下步骤:
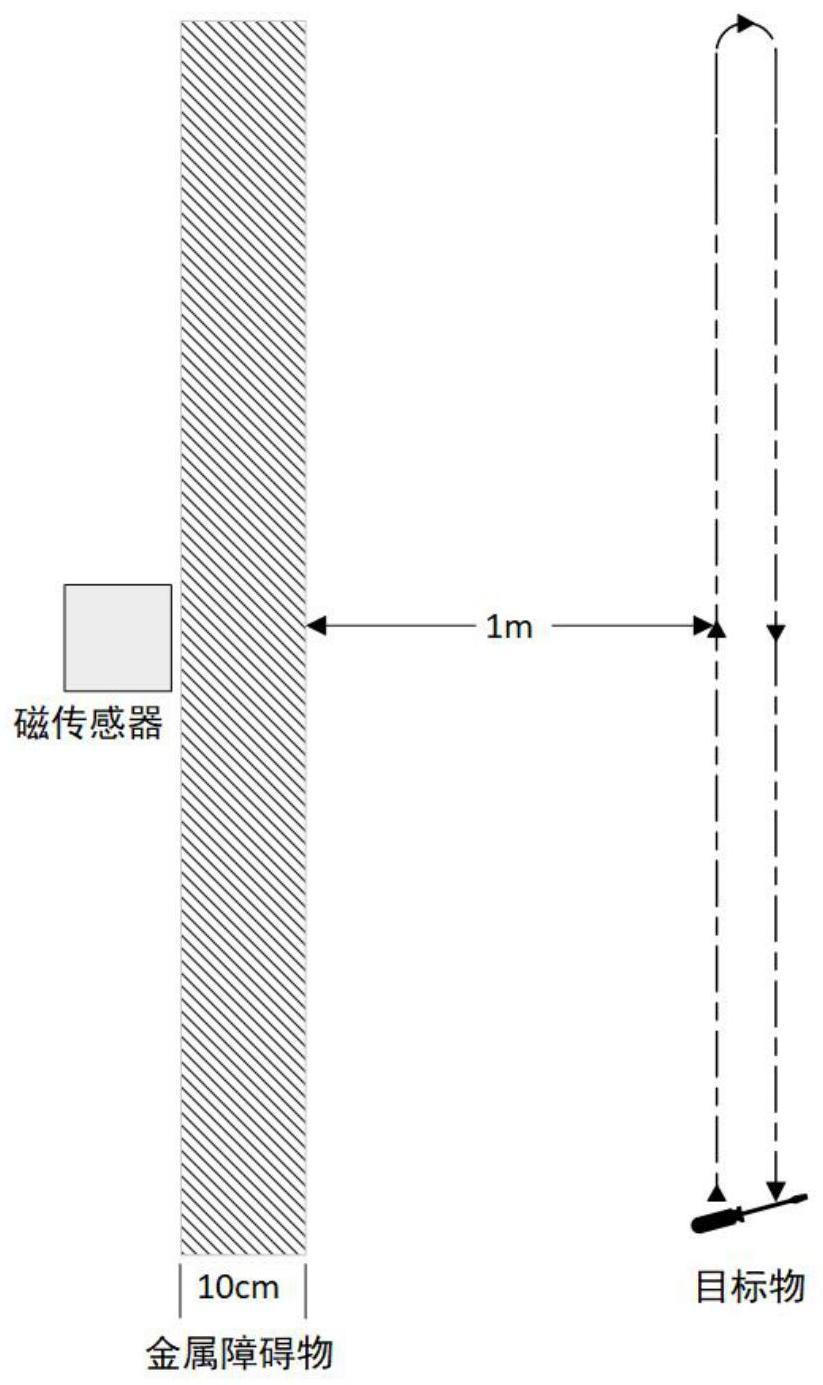
3、步骤1:放置单个磁性传感器或磁性传感器阵列在障碍物后方,磁性目标在障碍物前方;
4、步骤2:当放置单个磁性传感器时,用于检测移动磁性目标,具体如下:
5、步骤2-1:磁性传感器测量磁场三分量;
6、磁性传感器探测到磁场三分量信息后,将磁场强度等比例地转换为模拟电压信号,并将模拟电压信号通过数据线传送至数据采集卡,通过数据采集卡将连续的模拟电压信号转换为离散的数字电压信号;
7、步骤2-2:将数字电压信号发送到信息处理终端;
8、步骤2-3:信息处理终端将数字电压信号恢复为磁场三分量信号并进行处理,判断目标的移动信息;
9、(1)磁场在x轴上的分量bx在磁性目标经过时会产生一个极大值与极小值,物体往返时两极值出现的顺序相反;
10、(2)磁场在y轴上的分量by与bx变化趋势类似,变化方向相反;
11、(3)磁场在z轴上的分量bz有两个波峰,两极点所处位置即代表物体两次经过磁性传感器;
12、(4)通过切线法判断磁性传感器和目标的距离l;
13、先对水平磁异常作五条切线,其中三条水平切线分别过极大值点和极小值点,另外两条切线过曲线的两个拐点,五条线相交于四点,它们的横坐标分别为x1,x2,x3,x4,则距离公式:
14、
15、步骤3:当放置磁性传感器阵列时,用于磁性目标定位,具体如下:
16、步骤3-1:采用磁性传感器阵列构成探测系统,一个探测系统包括5个三分量磁性传感器,编号分别为1到5,5个磁性传感器处于一个平面十字,相邻磁性传感器的距离为d;
17、步骤3-2:使用磁性传感器阵列得到目标附近的磁梯度张量;
18、步骤3-3:使用zigbee模块对各磁性传感器进行组网,将各磁性传感器所得到的磁梯度张量发送到信息处理终端;
19、步骤3-4:信息处理终端将各磁性传感器得到的磁梯度张量进行处理,判断目标的位置信息:
20、1)计算三分量磁性传感器阵列磁场分量梯度;
21、具体方法为:1号磁性传感器测量三分量磁场;2、3号磁性传感器测量y方向的磁分量变化率;4、5号磁性传感器测量x方向的磁分量变化率;具体测得的各量如式(2)所示:
22、
23、其中,d为相邻磁性传感器基线距离,hmn,m=x,y,z;n=1,2,3,4,5代表第n号传感器测得的磁场矢量三分量hm的数值,由此得到的磁梯度张量如式(3)所示:
24、
25、2)基于磁梯度张量的磁性目标定位;
26、对磁性目标定位时,根据计算出的磁梯度张量得到定位的磁性目标到磁性传感器阵列的距离r,具体计算方法如式(4)所示:
27、
28、其中,hx,hy,hz为1号磁性传感器测得的三分量磁场值;
29、在磁性目标位置确定后,根据式(5)确定磁性目标的磁矩:
30、
31、优选地,所述磁性传感器阵列为磁通门传感器或光泵传感器。
32、本发明的有益效果如下:
33、采用本发明进行探测,可以很好地探测金属介质后的目标。此外,本发明还通过探测组网,有效解决传统单节点障碍物后方探测存在的探测盲区、目标遮挡等问题。
技术特征:
1.一种基于磁性传感器的障碍物后方探测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于磁性传感器的障碍物后方探测方法,其特征在于,所述磁性传感器阵列为磁通门传感器或光泵传感器。
技术总结
本发明公开了一种基于磁性传感器的障碍物后方探测方法,通过磁性传感器检测墙体等障碍物后方目标附近磁场信息,再根据所获磁场信息计算障碍物后方目标的位置、特征磁矩等信息;采用单个磁性传感器,用于测量墙体等障碍物后方目标附近的磁场三维矢量强度;采用磁性传感器阵列,用于测量墙体等障碍物后方目标附近的磁梯度张量,对目标进行定位。采用本发明进行探测,可以很好地探测金属介质后的目标。此外,本发明还可以通过组网探测,有效解决传统单节点障碍物后方探测存在的探测盲区、目标遮挡等问题。
技术研发人员:杜永乾,潘一铭,刘诗斌,李桂芳
受保护的技术使用者:西北工业大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!