一种多层次智能航迹跟踪关联方法、电子设备及存储介质与流程
1.本发明涉及一种雷达数据处理技术,尤其是一种用于目标的航迹跟踪的多层次智能航迹跟踪关联方法、电子设备及存储介质。
背景技术:
2.雷达是利用电磁波探测目标的电子设备。雷达数据处理的一项重要内容是目标的航迹跟踪处理,特别是低空目标雷达跟踪时受地杂波、气象杂波等的影响,存在着杂波剩余,而目标的航迹跟踪好坏直接关系到目标的跟踪连续性及操纵员的工作量。
3.数据关联问题是航迹跟踪中极为关键的环节,解决目标跟踪中的数据关联问题就是解决点迹与航迹的匹配问题。点迹与航迹关联不当可能会导致目标跟错或跟丢,这会严重影响整个跟踪系统的性能。
4.正常的航迹跟踪处理包括点迹预处理、点迹相关、自动起始、滤波跟踪等功能。滤波跟踪过程中点航相关的传统方法是滤波预测后给出预测窗,窗内的点进行点航相关就结束了。一般的处理过程是点迹进行点迹过滤后再进行航迹处理(航迹起始、航迹滤波、点航相关等内容),而点迹过滤与航迹跟踪之间就存在着一种矛盾关系,即若点迹过滤的过滤准则放的过低,则易出现点航的错误关联,造成航迹跟踪的跳点问题,若点迹过滤准则收的过高,则易出现目标的航迹失跟。
5.现有技术的航迹跟踪处理过程中,尤其是低空雷达的航迹跟踪过程中,点迹过滤与航迹跟踪之间的关系处理的不适当,航迹跟踪的连续性较差,容易出现航迹丢失的问题。
技术实现要素:
6.本发明是为避免上述已有技术中存在的不足之处,提供一种多层次智能航迹跟踪关联方法,以提升了航迹跟踪的连续性、进而有效降低了目标航迹丢失率。
7.本发明为解决技术问题采用以下技术方案。
8.本发明的一种多层次智能航迹跟踪关联方法,其包括以下步骤:
9.步骤1:点迹凝聚获得点迹数据,将点迹数据分层次过滤,分层次过滤后的数据分成1~n级;
10.步骤2:分别存储上述1~n级点迹数据中的各级点迹结果;
11.步骤3:对过滤后的第n级点迹数据进行关联;
12.步骤4:若关联成功,则结束关联操作;
13.步骤5:若关联失败,则调整点航关联参数,然后再对上一级过滤后的该级点迹数据进行关联;
14.步骤6:重复上述步骤3~步骤5,直至关联成功或重复步骤3~步骤5至对过滤后的第1级点迹数据进行关联;
15.步骤7:对第1级点迹数据的关联之后,不论是关联成功或关联失败,结束关联操作。
16.本发明的一种多层次智能航迹跟踪关联方法的结构特点也在于:
17.优选地,所述步骤5中,所述调整点航关联参数为收窄点航关联参数。
18.优选地,所述收窄的方式为等比收窄。
19.优选地,所述收窄的方式为等差收窄。
20.优选地,所述点航关联参数包含但不限于航迹预测跟踪窗参数。
21.优选地,所述航迹预测跟踪窗参数的收窄方式为预测窗减小。
22.优选地,所述航迹预测跟踪窗参数的收窄方式为提升特征参数的匹配门限。
23.本发明还公开了一种电子设备,其包括:
24.至少一个处理器;以及,
25.与所述至少一个处理器通信连接的存储器;其中,
26.所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行所述的多层次智能航迹跟踪关联方法。
27.本发明还公开了一种计算机可读存储介质,存储有计算机程序。所述计算机程序被处理器执行时实现所述的多层次智能航迹跟踪关联方法。
28.与已有技术相比,本发明有益效果体现在:
29.本发明公开了一种多层次智能航迹跟踪关联方法、电子设备及存储介质,点迹凝聚获得点迹数据,将点迹数据分成1~n级;对过滤后的第n级点迹数据进行关联;若关联成功则结束;若关联失败,则调整点航关联参数,然后再对上一级过滤后的该级点迹数据进行关联;重复上述步骤,直至关联成功或重复步骤至对过滤后的第1级点迹数据进行关联;对第1级点迹数据的关联之后结束关联操作。
30.本发明的多层次智能航迹跟踪关联方法、电子设备及存储介质,主要工作原理是通过利用点迹过滤过程中的中间过程的点迹数据,提升航迹跟踪特别是点航相关的性能,同时通过反向上推关联点迹,过滤中间过程点迹,放宽点迹质量限制,同时收窄航迹预测跟踪窗及特征匹配参数,减少误跟踪的可能性。最后是通过综合参数调整,达到整体性能最优。
31.本发明的多层次智能航迹跟踪关联方法、电子设备及存储介质,具有能够提升航迹跟踪的连续性并且降低了目标航迹的丢失率等优点。
附图说明
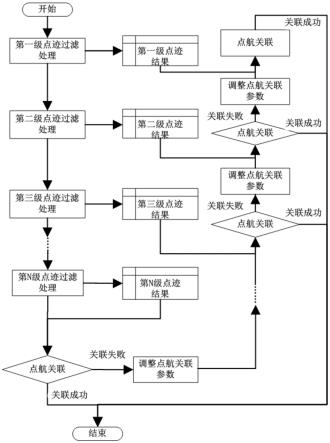
32.图1为本发明的一种多层次智能航迹跟踪关联方法的流程图。
33.以下通过具体实施方式,并结合附图对本发明作进一步说明。
具体实施方式
34.参见图1,本发明的一种多层次智能航迹跟踪关联方法,其包括以下步骤:
35.步骤1:点迹凝聚获得点迹数据,将点迹数据分层次过滤,分层次过滤后的数据分成1~n级;
36.步骤2:分别存储上述1~n级点迹数据中的各级点迹结果;
37.步骤3:对过滤后的第n级点迹数据进行关联;
38.步骤4:若关联成功,则结束关联操作;
39.步骤5:若关联失败,则调整点航关联参数,然后再对上一级过滤后的该级点迹数据进行关联;
40.步骤6:重复上述步骤3~步骤5,直至关联成功或重复步骤3~步骤5至对过滤后的第1级点迹数据进行关联;
41.步骤7:对第1级点迹数据的关联之后,不论是关联成功或关联失败,结束关联操作。
42.具体实施时,所述步骤5中,所述调整点航关联参数为收窄点航关联参数。
43.具体实施时,所述收窄的方式为等比收窄。
44.具体实施时,所述收窄的方式为等差收窄。
45.具体实施时,所述点航关联参数包含但不限于航迹预测跟踪窗参数。
46.具体实施时,所述航迹预测跟踪窗参数的收窄方式为预测窗减小。
47.具体实施时,所述航迹预测跟踪窗参数的收窄方式为提升特征参数的匹配门限。
48.本发明还公开了一种电子设备,其包括:
49.至少一个处理器;以及,
50.与所述至少一个处理器通信连接的存储器;其中,
51.所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行所述的多层次智能航迹跟踪关联方法。
52.本发明还公开了一种计算机可读存储介质,存储有计算机程序。所述计算机程序被处理器执行时实现所述的多层次智能航迹跟踪关联方法。
53.本发明的多层次智能航迹跟踪关联方法、电子设备及存储介质,主要工作原理是通过利用点迹过滤过程中的中间过程的点迹数据,提升航迹跟踪特别是点航相关的性能,同时通过反向上推关联点迹,过滤中间过程点迹,放宽点迹质量限制,同时收窄航迹预测跟踪窗及特征匹配参数,减少误跟踪的可能性。最后是通过综合参数调整,达到整体性能最优。
54.本发明的多层次智能航迹跟踪关联方法的主要流程如下:
55.1、点迹凝聚完之后,将点迹数据按照预定规则分层次过滤,分层次过滤后的数据分成1~n级;为了滤除一些虚假点进一步进行n级点迹过滤,降低点迹数。分别存储各级点迹结果。
56.预定规则包含但不限于一下几种规则.
57.规则1)信噪比门限规则:第一级点迹过滤信噪比门限为t1,第二级别过滤信噪比门限为t2,....第m级过滤信噪比门限为tm....第n级过滤信噪比门限为tn。当点迹信噪比低于信噪比门限时则过滤掉当前点迹,否则保留。其中t1,t2...tn可以人为设定,也可以按照等差或等比的准则设定,例如tm=t1+(m-1)*d,其中d为等差间隔(例如d=1db);
58.tm=t1*q^(m-1),其中q为等比系数(例如q=1.1);
59.规则2)方位宽度规则:第一级点迹过滤方位宽度门限为w1,第二级别过滤方位宽度门限为w2,....第m级过滤信噪比门限为wm....第n级过滤方位宽度门限为wn。当点迹方位宽度低于方位宽度门限时则过滤掉当前点迹,否则保留。其中t1,t2...tn可以人为设定,也可以按照等差或等比的准则设定,例如wm=w1+(m-1)*dw,其中dw为等差间隔(例如dw=0.1度);wm=w1*qw^(m-1),其中qw为等比系数(例如qw=1.06);
60.规则3)距离厚度偏离程度规则:第一级点迹过滤距离厚度偏离门限为r1,第二级别过滤距离厚度偏离门限为r2,....第m级过滤信噪比门限为rm....第n级过滤距离厚度偏离门限为rn。当点迹距离厚度偏离高于距离厚度偏离门限时则过滤掉当前点迹,否则保留。其中距离厚度偏离程度=|点迹距离厚度-标准距离厚度|,r1,r2...rn可以人为设定,也可以按照等差或等比的准则设定,例如rm=r1-(m-1)*dr,其中dr为等差间隔(例如dr=2米);
61.rm=r1*qr^(m-1),其中qr为等比系数(例如qr=0.95);
62.规则4)多普勒谱宽偏离程度规则:第一级点迹过滤多普勒谱宽偏离门限为d1,第二级别过滤多普勒谱宽偏离门限为d2,....第m级过滤信噪比门限为dm....第n级过滤多普勒谱宽偏离门限为dn。当点迹多普勒谱宽偏离高于多普勒谱宽偏离门限时则过滤掉当前点迹,否则保留。其中多普勒谱宽偏离程度=|点迹多普勒谱宽-标准多普勒谱宽|,d1,d2...dn可以人为设定,也可以按照等差或等比的准则设定,例如dm=d1-(m-1)*dd,其中dd为等差间隔(例如dd=8赫兹);dm=d1*qd^(m-1),其中qd为等比系数(例如qd=0.98);
63.规则5)点迹质量评分规则:点迹质量评分=各点迹参数的加权和,如点迹质量评分s=w1*归一化方位宽度+w2*归一化信噪比+w3*(1/归一化多普勒谱宽偏离)+w4*(1/归一化距离厚度偏离)+....,(w1+w2+w3+.....=1),w1~wn为权重系数,然后点迹过滤准则按照点迹质量评分进行过滤。例如第一级点迹过滤点迹质量评分门限为s1,第二级别过滤点迹质量评分门限为s2,....第m级过滤信噪比门限为sm....第n级过滤点迹质量评分门限为sn。当点迹点迹质量评分低于点迹质量评分门限时则过滤掉当前点迹,否则保留。s1,s2...sn可以人为设定,也可以按照等差或等比的准则设定,例如sm=s1+(m-1)*ds,其中dd为等差间隔(例如ds=0.05分);
64.sm=s1*qs^(m-1),其中qs为等比系数(例如qs=1.01);
65.规则6)还可以为其他规则:如幅度偏差系数规则;熵特征规则,等
66.规则7)也可以为一些非规律变化的规则,如前n-1级过滤按照前边叙述的规则,仅在第n级点迹过滤时采用如下准则:当点迹的距离小于距离tr,同时点迹来自低波束(某一波束通道信号),则过滤掉此点迹,否则保留。其中tr可以人为设定。
67.2、在进行点航相关时先从第n级点迹过滤后的点迹进行关联,若关联上,结束。
68.3、未关联上则进一步收紧点航关联参数后,与n-1级点迹过滤的点迹结果进行点航关联,若关联上结束,未关联上则再进一步收紧点航关联参数,然后进行n-2级点迹过滤的点迹结果进行点航关联。
69.3、同理,与n-2级点迹过滤的点迹结果进行点航关联的过程与之前一样,中间若有任何一级能够关联上则结束,否则收紧点航关联参数后向上一级点迹进行点航关联,直至第1级点迹过滤的点迹结果进行点航关联。
70.4、第1级点迹进行点航关联后,无论是否关联上,都结束操作。
71.本发明的多层次智能航迹跟踪关联方法、电子设备及存储介质,属于雷达数据处理领域中的航迹跟踪问题,是一种反向向上追溯的智能航迹关联方法,旨在提升雷达航迹跟踪能力,特别是低空雷达的航迹跟踪问题。主要功能是给出了一种多层次智能航迹跟踪关联方法,在杂波剩余点迹较少(雷达操作画面较干净,降低操纵员负担)的条件下,提升了航迹跟踪的连续性并且降低了目标航迹的丢失率。
72.本发明中,调整点航相关参数,参数包含但不限于航迹预测跟踪窗参数,匹配特征
参数。特征参数包括距离厚度、方位宽度、信噪比变化率、幅度偏差、数据源(如波束信号选择)等。匹配收窄的方法包括但不限于等比变化、等差变化。
73.关联过程中的准则收窄规则方法包括:预测窗减小、特征匹配门限提升(信噪比、ep回波数、距离厚度、方位宽度)、数据源(如波束信号选择)等。
74.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
75.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1