一种提升自行车避震器控制效率的方法
1.本发明主要涉及车辆避震技术领域,尤其是涉及一种提升自行车避震器控制效率的方法。
背景技术:
2.阻尼油路系统(damping)是自行车避震器(shockabsorber)的重要组成部分,当前阻尼油路系统调节主要依靠手工调节,此外,基于传感器的避震调节系统存在延时问题,并且挡位固定调节范围受限,由于受人员体重、室外气压、阻尼油黏稠度等多个变量的影响,自行车避震器阻尼油路控制一直是自行车骑乘人员与生产厂家面临的难题。
3.当前全球最大的自行车避震器厂家fox利用传感器技术对地面进行检测,旗下fox live valve system总共有这样几个部件构成:三个高速传感器,一块电池,一个控制器以及两个live valve,核心部件则是控制器和磁性阀门。每秒1000次的频率进行测算来感应地形,如果检测到来自地面的冲击,它将在3毫秒内打开阻尼,但在实际体验与测评过程中该检测存在延迟,使得自行车避震器阻尼调节反应缓慢不及时,油路控制缺乏线性。此外,rockshox旗下flight attendant系统内置算法经过全球无数林道路程的累积,经过科学设计,可以替进行复杂的计算,它能够分析不断变化的数据流,算出最适合车手和地面情况的避震设定,具有自动3位压缩调节(打开/踏板/锁定),具有独立可调的低速压缩和回弹,但是该系统仍需要手工辅助设定初始压缩及回弹阻尼。
技术实现要素:
4.本发明所要解决的技术问题:
5.提供一种提升自行车避震器控制效率的方法,解决当前自行车油路阻系统主要依靠手工调节,调节量不准确的问题。
6.本发明解决上述技术问题所采用的技术方案:
7.一种提升自行车避震器控制效率的方法,所述方法包括以下步骤:
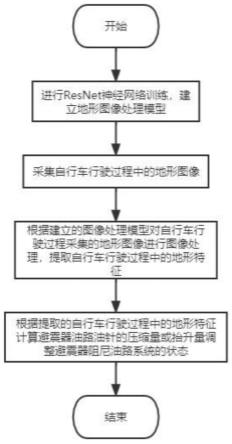
8.步骤1:进行resnet神经网络训练,建立地形图像处理模型;
9.步骤2:采集自行车行驶过程中的地形图像;
10.步骤3:根据建立的图像处理模型对自行车行驶过程采集的地形图像进行图像处理,提取自行车行驶过程中的地形特征;
11.步骤4:根据提取的自行车行驶过程中的地形特征计算避震器油路油针的压缩量或抬升量调整避震器阻尼油路系统的状态。
12.进一步的,步骤1所述地形特征为自行车行驶过程中前方固定范围内的道路相较于自行车当前行驶路面的坡度差。
13.进一步的,将所述坡度差分为小于10cm、10cm-50cm的和大于50cm的坡度差,不同的坡度差对应油针不同的压缩或抬升量。
14.进一步的,步骤2所述采集自行车行驶过程中的地形图像的方法为:设置高速摄像
机实时采集自行车行驶过程中的地形图像。
15.进一步的,步骤4具体包括,避震器控制系统根据提取的地形特征结果控制避震器中的电机带动避震器中阻尼油路系统的油针压缩或抬升控住阻尼油路系统的开关以及调节的范围。
16.进一步的,当所坡度差小于10cm,油针不进行压缩或抬升,阻尼油路系统关闭;
17.当所述坡度差为10-50cm,电机带动油针进行抬升,抬升量为油针总长的25%,控制阻尼油路系统的调节量为25%;
18.当所述坡度差大于50cm,电机带动油针进行抬升,抬升量为油针总长的50%,控制阻尼油路系统的调节量为50%。
19.本发明的有益效果:
20.本发明根据高速摄像机提供的图片数据,利用resnet神经网络对输入地形图片数据进行路面坡度识别计算路面的坡度差,根据识别结果控制阻尼油路系统的油针调节避震器关闭或打开,可以改善人工调节阻尼油路系统调节不准确的缺陷,有利于提升自行车骑行过程中的安全性和舒适度。
附图说明
21.图1为本发明所述一种提升自行车避震器控制效率的方法的方法流程图。
22.图2为本发明实施例中所述避震器正视图。
23.图3为本发明实施例中所述阻尼油路系统油针结构示意图。
具体实施方式
24.根据地形特征进行resnet神经网络训练,建立地形图像处理模型,过程如图1所示;采集自行车行驶过程中的地形图像;图像处理模型对自行车行驶过程采集的地形图像进行图像处理,提取自行车行驶过程中的地形特征;所述地形特征主要为自行车行驶方向的坡度差大小,根据提取的自行车行驶过程中的地形特征计算如图3所示的避震器油路油针的压缩和抬升的长度调整避震器阻尼油路系统的状态。
25.建立地形图像处理模型:本实施中采用的resnet神经网络为18层;采集自行车行驶过程中的地形图像,对采集的图像进行数据初始化,进行resnet 18神经网络训练;resnet残差网络是由一系列残差块组成的,该神经网络包含17个卷积层和1个全连接层。经过数据处理后的图像的初始函数为g(x)函数,resnet18在其后增加一些网络层,则图像函数变为f(g(x)),根据链式法则,对该图像函数进行求导变为因为深层网络的梯度链是很长的连乘,当网络逐渐收敛时,梯度本身比较小,长的连乘很容易导致最终输出的梯度为0,在增加一些层后,网络变为f(g(x)+x),这样的做法使得整个梯度变大一些,更容易训练,对x求导变为:经过多次迭代后,模型准确率较大的提高,传入地形图像后,能够对地形特征进行提取,识别出小于10cm的坡度差,表示路面可能为较为平整的公路路面等;识别出10-50cm的坡度差,表示路面可能为具有一定起伏的林道路路面等;识别出大于50cm的坡度差,表示面可能为起伏较大的山地路面等。
26.在如图2所示的避震器的肩部设置高速摄像机,实时采集距离自行车行驶方向前方5米的地形图像,经过resnet神经网络训练的图像处理模型识别高速摄像机采集到的地形图像,将识别结果传输给阻尼油路控制系统,阻尼油路控制系统中步进电机根据识别出的图像特征控制油针回弹或收缩。具体过程如下,当图像处理模型识别出前方道路的坡度差小于10cm,表示前方骑行道路较为平整,此时将阻尼油路系统关闭,以保障骑行者的踩踏效率,避免在骑行过程中出现泄力现象;当图像处理模型识别出前方道路的坡度差大小处于10-50cm,则表示前方道路可能为林道等具有一定坡度的道路,且林道由于视野关系,通常不能及时辨别前方的道路情况,需要避震器随时应对前方障碍,在这一地形的骑行情况中,需要将阻尼油路系统调整为适中,能保持有效的踩踏效率的同时过滤复杂不一的障碍,控制避震器阻尼油路系统油针抬升量为油针总长的25%,即控制阻尼油系统的调节量为25%;当图像处理模型识别出前方的坡度差大于50cm,表示前方道路可能为山地或者别的路面落差超过50cm的道路,这时需要阻尼油路系统更加顺畅灵活的工作,需要完全打开油路,保证有效过滤障碍,步进电机带动避震器阻尼系统的油针压缩,将油针抬升量调整为油针总长的50%,即控制阻尼油路系统的调节量为50%;当resnet神经网络图像处理模型检测到自行车前方行驶路段的坡度差小于50cm后,阻尼油路系统的控制器控制步进电机带动油针压缩对应的长度,减少阻力,提升骑行的效率。
技术特征:
1.一种提升自行车避震器控制效率的方法,其特征在于,所述方法包括以下步骤:步骤1:进行resnet神经网络训练,建立地形图像处理模型;步骤2:采集自行车行驶过程前方固定范围外的地形图像;步骤3:根据建立的图像处理模型对自行车行驶过程采集的地形图像进行图像处理,提取自行车行驶过程中的地形特征;步骤4:根据提取的自行车行驶过程中的地形特征计算避震器油路油针的压缩量或抬升量调整避震器阻尼油路系统的状态。2.根据权利要求1所述的一种提升自行车避震器控制效率的方法,其特征在于,步骤1所述地形特征为自行车行驶过程中前方固定范围内的道路相较于自行车当前行驶路面的坡度差。3.根据权利要求2所述的一种提升自行车避震器控制效率的方法,其特征在于,将所述坡度差分为小于10cm、10cm-50cm的和大于50cm的坡度差,不同的坡度差对应油针不同的压缩或抬升量。4.根据权利要求1所述的一种提升自行车避震器控制效率的方法,其特征在于,步骤2所述采集自行车行驶过程中的地形图像的方法为:设置高速摄像机实时采集自行车行驶过程中的地形图像。5.根据权利要求3所述的一种提升自行车避震器控制效率的方法,其特征在于,步骤4具体包括,避震器控制系统根据提取的地形特征结果控制避震器中的电机带动避震器中阻尼油路系统的油针压缩或抬升控住阻尼油路系统的开关以及调节的范围。6.根据权利要求5所述的一种提升自行车避震器控制效率的方法,其特征在于,当所述坡度差小于10cm时,油针不进行压缩或抬升,阻尼油路系统关闭;当所述坡度差为10-50cm时,电机带动油针进行抬升,抬升量为油针总长的25%,控制阻尼油路系统的调节量为25%;当所述坡度差大于50cm时,电机带动油针进行抬升,抬升量为油针总长的50%,控制阻尼油路系统的调节量为50%。
技术总结
本发明主要涉及车辆避震技术领域,为了解决当前自行车油路阻系统主要依靠手工调节,调节量不准确的问题,本发明提供一种提升自行车避震器控制效率的方法,根据地形特征进行ResNet神经网络训练,建立地形图像处理模型;采集自行车行驶过程中的地形图像;图像处理模型对自行车行驶过程采集的地形图像进行图像处理,提取自行车行驶过程中的地形特征;所述地形特征主要为自行车行驶方向固定范围内的道路起伏坡度,根据提取的自行车行驶过程中的地形特征计算避震器油路油针压缩和抬升的长度调整避震器阻尼油路系统的开关以及调节量。度调整避震器阻尼油路系统的开关以及调节量。度调整避震器阻尼油路系统的开关以及调节量。
技术研发人员:李霖 陈尧
受保护的技术使用者:攀枝花学院
技术研发日:2022.12.02
技术公布日:2023/3/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1