一种膝关节假体微动检测装置
1.本发明涉及微动检测领域,具体涉及一种膝关节假体微动检测装置。
背景技术:
2.人体膝关节具有复杂的运动方式,包括三种旋转(内/外旋、屈曲/伸直和内/外翻)和三种位移(前后移位、内外侧移位和上下移位),这六种运动方式是相互联系的。日常生活中膝关节屈伸范围为0至117
°
,内外旋转是4
°
至5
°
,行走时屈伸幅度0至70
°
,上下楼梯要求屈曲90
°
至120
°
。
3.微动指的是植入物假体与宿骨之间发生的较小的相对运动。生物型假体的初始稳定性由产品的结构以及植入后的力学传导途径决定,假体-骨界面之间的微动量是判定生物型假体初始稳定性好坏的重要指标。假体-骨界面之间的微动或者微位移超过150微米时会阻碍骨长入,假体的初始稳定性是假体长期稳定性的先决条件。对于生物型假体的初始稳定性依赖于压配设计,不充分的压配可能会导致假体松动,但过分的压配会破坏骨质和骨折。
4.因此,希望能提供一种体外可调式膝关节假体的微动检测装置,来检测不同屈曲位下假体-骨界面的微动量,为假体的设计以及作用机制提供数据,尤其是真实地模拟假体在临床上的实际受载情况,为假体临床上的长期稳定性验证提供更加充分的数据支持。
技术实现要素:
5.针对现有技术中的上述不足,本发明提供了一种膝关节假体微动检测装置。
6.为了达到上述发明目的,本发明采用的技术方案为:一种膝关节假体微动检测装置,所述膝关节假体微动检测装置用于检测植入到宿骨实体样本的胫骨段和股骨段上的膝关节假体与所述宿骨实体样本之间的微动量,包括膝关节运动模拟单元,所述膝关节运动模拟单元具体包括:机架;骨盆滑块,所述骨盆滑块以可被驱动沿竖直方向运动的方式通过滑块连接所述机架而模拟人骨盆竖直方向的运动;胫骨架,所述胫骨架以可被驱动相对所述机架转动的方式通过铰链连接所述机架而模拟人踝关节运动,所述胫骨架的上端能够通过夹具与所述宿骨实体样本的胫骨段相连接;股骨架,所述股骨架与所述骨盆滑块之间通过铰链自由连接而模拟人髋关节屈曲,所述股骨架的下端能够通过夹具与所述宿骨实体样本的股骨段相连接;非接触式检测单元,所述非接触式检测单元用于检测所述膝关节假体与宿骨实体样本之间的微动量,按照特定的膝关节运动参数实现所述膝关节运动模拟单元的运动过程,并在所述膝关节运动模拟单元响应于预定的运动指令的运动过程中按预定的时间间隔重复测量所述膝关节假体相对于所述宿骨实体样本的微动量。
7.进一步的,所述非接触式检测单元包括:图像采集模块,所述图像采集模块用于采集所述膝关节假体和所述宿骨实体样本的图像,其中,宿骨实体样本的图像中包括预先设置在所述膝关节假体和所述宿骨实体样本上的定位标记,所述定位标记以一一对应、一多对应、多一对应或多多对应的方式设置在所述膝关节假体和所述宿骨实体样本上;数据处理模块,所述数据处理模块用于处理所采集的图像,确定所述膝关节假体和所述宿骨实体样本上的各个对应定位标记之间的距离,并根据该距离的变化确定所述膝关节假体相对于所述宿骨实体样本的微动量。
8.进一步的,所述定位标记为在膝关节假体的若干待检测位置以及与所述待监测位置对应的宿骨位置设置的圆形定位点,所述数据处理模块通过椭圆拟合定位所述定位点的椭圆投影图像的中心位置坐标,所述宿骨实体样本上的定位点的位置与所述膝关节假体上的对应定位点的位置的距离在10mm以内。
9.进一步的,所述膝关节假体微动检测装置还包括第一驱动电机,所述第一驱动电机用于驱动所述胫骨架相对于所述机架的旋转;所述膝关节假体微动检测装置还包括第二驱动电机以及将所述第二驱动电机的旋转运动转换为所述骨盆滑块相对于所述机架沿竖直方向的运动的传动装置。
10.进一步的,所述膝关节假体微动检测装置还包括以下至少之一:第一动态扭矩传感器,所述第一动态扭矩传感器用于检测踝关节处的扭矩的动态扭矩传感器;第一编码器,所述第一编码器用于检测踝关节处的运动角度;静态扭矩传感器,所述静态扭矩传感器用于检测胫骨架轴线上的扭矩;第二编码器,所述第二编码器用于检测髋关节处的运动角度;第二动态扭矩传感器,所述第二动态扭矩传感器用于检测所述第二驱动电机扭矩以及计算所述骨盆滑块所受的沿竖直方向的力。
11.进一步的,所述膝关节假体微动检测装置的微动检测过程为:s1、在所述膝关节假体和所述宿骨实体样本上设置定位标记;s2、通过投射系统将光源发出的光栅条纹投射到所述膝关节假体和所述宿骨实体样本上;s3、通过双目相机采集由所述膝关节假体和所述宿骨实体样本的形面调制所述光栅条纹而成的测量条纹图像;s4、通过数据处理模块从所述测量条纹图像中提取所述定位标记的特征,并利用外极线约束准则和立体视觉技术确定所述定位标记的空间位置,进而确定所述膝关节假体和所述宿骨实体样本上的各个对应定位标记之间的距离;s5、在所述膝关节运动模拟单元的运动过程中重复上述步骤,并根据所述膝关节假体和所述宿骨实体样本上的各个对应定位标记之间的距离的变化确定所述膝关节假体相对于所述宿骨实体样本的微动量。
12.进一步的,在所述膝关节运动模拟单元的运动过程中,所述非接触式检测单元按预定的时间间隔重复测量所述膝关节假体相对于所述宿骨实体样本的微动量。
13.进一步的,所述膝关节运动模拟单元的运动过程模拟以下至少之一的预定运动指
令:步态行走、上下楼梯、下蹲。
14.进一步的,所述骨盆滑块或所述胫骨架能够被单独驱动或者一起都被驱动,以按照特定的膝关节运动参数实现所述膝关节运动模拟单元的运动过程。
15.本发明具有以下有益效果:1、膝关节运动模拟单元在电机控制下具有较高的控制精度,能够准确地复原人膝关节的运动状态。
16.2、膝关节假体微动检测装置具有检测数据重复性高、精度高以及简单、快捷等优点,能够准确和有效地评价出膝关节假体结构设计的有效性,并对临床效果有很好的指导意义。
附图说明
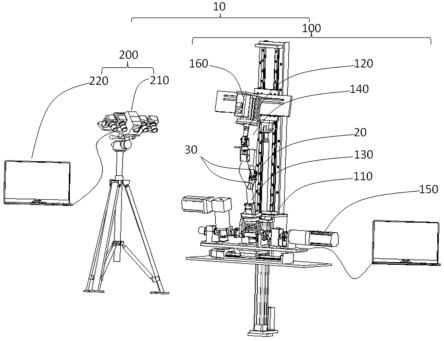
17.图1为本发明的膝关节假体微动检测装置的非接触式检测单元的检测过程;图2a和图2b为本发明实施例定位标记在不同视角测量下的空间坐标;图3为本发明实施例的膝关节假体微动检测装置。
18.附图标记说明:10、膝关节假体微动检测装置;20、膝关节假体;30、宿骨实体样本;100、膝关节运动模拟单元;110、机架;120、骨盆滑块;130、胫骨架;140、股骨架;150、第一驱动电机;160、第二驱动电机;200、非接触式检测单元;210、图像采集模块;220、数据处理模块。
具体实施方式
19.下面对本发明的具体实施方式进行描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
20.一种膝关节假体微动检测装置,所述膝关节假体微动检测装置用于检测植入到宿骨实体样本的胫骨段和股骨段上的膝关节假体与所述宿骨实体样本之间的微动量,包括膝关节运动模拟单元,所述膝关节运动模拟单元具体包括:机架;骨盆滑块,所述骨盆滑块以可被驱动沿竖直方向运动的方式通过滑块连接所述机架而模拟人骨盆竖直方向的运动;胫骨架,所述胫骨架以可被驱动相对所述机架转动的方式通过铰链连接所述机架而模拟人踝关节运动,所述胫骨架的上端能够通过夹具与所述宿骨实体样本的胫骨段相连接;股骨架,所述股骨架与所述骨盆滑块之间通过铰链自由连接而模拟人髋关节屈曲,所述股骨架的下端能够通过夹具与所述宿骨实体样本的股骨段相连接;非接触式检测单元,所述非接触式检测单元用于检测所述膝关节假体与宿骨实体样本之间的微动量,按照特定的膝关节运动参数实现所述膝关节运动模拟单元的运动过程,并在所述膝关节运动模拟单元响应于预定的运动指令的运动过程中按预定的时间间隔重复测量所述膝关节假体相对于所述宿骨实体样本的微动量。
21.膝关节假体植入在体外的宿骨实体样本的胫骨段和股骨段上,并进而分别与胫骨架的上端和股骨架的下端通过夹具相连。因而可以利用膝关节运动模拟单元在固定的机架上模拟人膝关节的运动。骨盆滑块被驱动相对机架沿竖直方向运动,胫骨架被驱动相对所述机架转动,转动可以按照多个自由度进行,两者共同配合能够分别模拟膝关节的屈曲/伸直、内外旋和内外翻运动。
22.具体而言,如图1所示的本发明膝关节假体微动检测装置10。该膝关节假体微动检测装置用于检测植入到宿骨实体样本30的胫骨段和股骨段上的膝关节假体20与所述宿骨实体样本30之间的微动量。该膝关节假体微动检测装置10包括:膝关节运动模拟单元100和非接触式检测单元200。
23.膝关节运动模拟单元包括:机架110;骨盆滑块120,所述骨盆滑块以可被驱动沿竖直方向运动的方式通过滑块连接所述机架110而模拟人骨盆竖直方向的运动;胫骨架130,所述胫骨架以可被驱动相对所述机架110转动的方式通过铰链连接所述机架110而模拟人踝关节运动,所述胫骨架130的上端能够通过夹具与所述宿骨实体样本30的胫骨段相连接;和股骨架140,所述股骨架与所述骨盆滑块120之间通过铰链自由连接而模拟人髋关节屈曲,所述股骨架140的下端能够通过夹具与所述宿骨实体样本30的股骨段相连接。
24.所述膝关节假体微动检测装置还包括第一驱动电机150,所述第一驱动电机150用于驱动所述胫骨架相对于所述机架的旋转;所述膝关节假体微动检测装置还包括第二驱动电机以及将所述第二驱动电机的旋转运动转换为所述骨盆滑块相对于所述机架沿竖直方向的运动的传动装置。
25.第一驱动电机150作为踝关节驱动电机驱动胫骨架130相对于机架110转动。第二驱动电机160通过传动装置驱动骨盆滑块120相对于机架110沿竖直方向运动。根据需要,膝关节假体微动检测装置还包括以下力或位移传感器中的至少之一:第一动态扭矩传感器,所述第一动态扭矩传感器用于检测踝关节处的扭矩的动态扭矩传感器;第一编码器,所述第一编码器用于检测踝关节处的运动角度;静态扭矩传感器,所述静态扭矩传感器用于检测胫骨架轴线上的扭矩;第二编码器,所述第二编码器用于检测髋关节处的运动角度;第二动态扭矩传感器,所述第二动态扭矩传感器用于检测所述第二驱动电机扭矩以及计算所述骨盆滑块所受的沿竖直方向的力。由此可以根据这些力或位移传感器返回的检测结果确定膝关节假体的状态和受力。优选的是,将所述第二驱动电机的旋转运动转换为所述骨盆滑块的沿竖直方向的运动的传动装置为以下至少之一:带传动、链传动、丝杠传动。
26.非接触式检测单元200用于检测所述膝关节假体20与宿骨实体样本30之间的微动量,包括:图像采集模块210和数据处理模块220,其中,图像采集模块210包括用于将光源发出的光栅条纹投射到所述膝关节假体和所述宿骨实体样本上的投射系统,以及用于采集由所述膝关节假体和所述宿骨实体样本的形面调制所述光栅条纹而成的测量条纹图像的双目相机;数据处理模块220被设计为适于从双目相机所采集的所述测量条纹图像中提取所述定位标记的特征,并利用外极线约束准则和立体视觉技术确定所述定位标记的空间位置。应当理解,其它的测量所述定位标记的空间位置的非接触式方法(例如超声波反射法等)也都是可行的。图像采集模块210用于采集所述膝关节假体20和所述宿骨实体样本30的图像,图像中包含事先对应地提供在所述膝关节假体20和所述宿骨实体样本30上的定位标记。视需要检测的微动量而定,可以是一个膝关节假体20上的定位标记对应于一个宿骨实
体样本30上的定位标记,也可以是多个膝关节假体20上的定位标记对应于一个宿骨实体样本30上的定位标记,或者可以是一个膝关节假体20上的定位标记对应于多个宿骨实体样本30上的定位标记,甚至可以是多个膝关节假体20上的定位标记对应于多个宿骨实体样本30上的定位标记。数据处理模块220用于处理所采集的图像,确定膝关节假体20和宿骨实体样本30上的各个对应定位标记之间的距离,并进而根据该距离的变化确定膝关节假体20相对于宿骨实体样本30的微动量。优选的是,所述定位标记是在膝关节假体的若干待检测位置以及与所述待检测位置对应的宿骨位置提供的特定的圆形定位点。定位标记为圆形定位点的有利之处在于,所述数据处理模块能够通过椭圆拟合定位所述圆形的定位点的椭圆投影图像的中心位置坐标。应当理解,定位标记也可以具有其它的形状,只要所述数据处理模块能够通过其它方法确定其空间位置坐标。
27.膝关节假体20植入宿骨实体样本30后,固定夹持在胫骨架130的上端和股骨架140的下端上。在膝关节假体20的前侧、后侧、内侧和外侧等的待测位置以及邻近的相应宿骨实体样本30上的位置处,对应地贴上特定的定位点。在进行后续的检测之前,首先通过接触式或非接触式的测量方法测量膝关节假体20和宿骨实体样本30上如上所述对应提供的定位点的距离。在此实施例中,设定膝关节假体20和宿骨实体样本30上的对应定位点之间的距离在10mm以内。后续的检测中,通过测量相应的对应定位点之间的距离变化,确定膝关节假体20相对于宿骨实体样本30的微动量。
28.开始检测时,首先通过经过投射系统将光源发出的光栅条纹投射到膝关节假体20和宿骨实体样本30上,光栅条纹经过膝关节假体20和宿骨实体样本30的形面调制后形成测量条纹。接着,通过双目相机采集测量条纹图像。然后,通过数据处理模块从测量条纹图像中提取定位点的特征,并利用外极线约束准则和立体视觉技术确定所述定位点的空间位置,进而确定所述膝关节假体和所述宿骨实体样本上的各个对应定位点之间的距离。将所测得的各个对应定位点之间的距离与预先测得的距离值相比较,提供修正量以标定非接触式检测单元200。
29.标定后即可利用非接触式检测单元200对任意姿态的静止或运动中的膝关节假体20和宿骨实体样本30上的定位点进行测量。测量对应定位点之间的距离或微动量的同时,非接触式检测单元200也通过根据需要布置的上述力或位移传感器返回对于膝关节假体20的当前状态及受力的测量结果。
30.根据本发明的上述实施例的一种变化形式,可以以膝关节运动模拟单元控制膝关节假体运动到特定的屈曲条件,例如:直立位、10
°
屈曲位置、90
°
屈曲位置或者130
°
以上的高屈曲等任意角度),然后测量该受载条件下的膝关节假体20与宿骨实体样本30上的对应定位点之间的距离,通过对前后数据的对比得出膝关节假体20相对于宿骨实体样本30的微动量数据。
31.根据本发明的上述实施例的另一种变化形式,可以给予膝关节运动模拟单元特定的运动指令使之重复运动(例如:步态行走、上下楼梯、下蹲等),此时按照预定的扫描时间间隔(例如1至30秒)不断扫描测量膝关节假体20与宿骨实体样本30上的对应定位点之间的距离,进而得出不同运动条件下的膝关节假体20相对于宿骨实体样本30的微动量数据曲线。优选的是,单独驱动或者一起驱动骨盆滑块和胫骨架,以按照特定的膝关节运动参数实现所述膝关节运动模拟单元的运动过程。上述特定的膝关节运动参数可以根据膝关节假体
磨损标准(例如国际标准iso14243-3)中的相应测试配置,或按照技术资料中披露的膝关节假体应当达到的运动状态来配置,还可以通过主动地驱动骨盆滑块或所述胫骨架中的至少一个来实现相应的运动参数,使膝关节运动模拟单元实现指定的运动。
32.给予膝关节运动模拟单元特定的运动指令时,可以参照外科植入物膝关节假体的磨损标准中的参数来设定膝关节运动模拟单元的相应的力和位移参数,也可以输入技术资料中披露的膝关节假体应当达到的运动参数状态对应的运动参数。当然,也可以通过主动地驱动骨盆滑块或所述胫骨架中的至少一个来实现相应的运动参数,使膝关节运动模拟单元实现指定的位移和旋转运动。
33.图3示意地示出了根据本发明的膝关节假体微动检测装置的非接触式检测单元的检测过程。以膝关节假体20上的定位点p为例,投射系统将光源发出的光栅条纹投射到膝关节假体20上,由于膝关节假体的形面调制而形成图中所示的测量条纹。双目相机拍摄该测量条纹得到测量条纹图像。数据处理模块220从所述测量条纹图像中提取定位点p的特征,并利用外极线约束准则和立体视觉技术确定所述定位标记的空间位置。图2a和图2b示意地示出了定位标记在不同视角测量下的空间坐标,其中的π
l
、πr为图像平面,o
cl
、o
cr
为左、右相机光心,且分别在被拍摄的膝关节假体上示出了两个视角下的点集。
34.当定位标记p为圆形定位点时,定位标记投射在测量条纹图像上成为椭圆形图像。此时进行标志识别,提取出符合一定要求的椭圆形边缘。通过圆度判断对象接近圆的程度。圆度的定义如下:式中为圆形的面积,为圆的周长。为圆度,,当二维图像为圆时,。椭圆形状随拍摄角度变化而变化,例如,对圆形定位标记摄影角度达到70度时,值为0.66左右。如果所选择的候选区域的形状因子不符合这个取决于拍摄角度的设定值,则该边缘被从考虑范围中剔除掉。
35.根据图像中提取出的椭圆形边缘拟合椭圆的方法可以参考a hn s j, rauh w. circular coded target for automation of optical 3d-measurement and camera calibration [j], inernational journal of pattern recognition and a rtif icial inerlligence, 2001,vol.15(6):905-919.,利用定位标记图像的椭圆形圆周边缘上的点集坐标,通过最小二乘拟合方法可以求出椭圆的5个参数(长半轴、短半轴、椭圆中心坐标、长半轴与图像坐标系中轴的夹角),然后根据这些椭圆参数计算出椭圆中心坐标。从而相当于对定位标记图像中心坐标进行定位。
[0036]
平面椭圆的解析表达式为。当边缘点很多时,可利用最小二乘椭圆拟合求得椭圆方程的系数a、b、c、d和e,根据椭圆方程系数可以计算出椭圆的上述5个参数,公式如下:
上式中为拟合椭圆中心坐标,为长半轴与图像坐标系轴夹角。根据上式进行变换得:根据上式得到的参数可以求得椭圆的长、短半轴、如下:为了抑制图像噪声的影响,提高定位精度,可对椭圆边缘进行多次拟合。即第一次拟合后,将每个边界点代入上述椭圆方程,计算残差。将残差较大的一部分点剔除,再对剩余的点进行二次拟合。重复若干次,直到均方差小于某一阈值为止。
[0037]
经过椭圆拟合得到图2a和图2b中所示点集中每个圆投影所得的椭圆的5个参数,对于中央标志点用表示,对于外围编码点用表示。按照参数读入的顺序对所有椭圆进行编号。从参数列表中提取到每个椭圆的长半轴和短半轴值,根据椭圆面积计算公式,计算所有椭圆的面积,通过比较找到面积最大的椭圆,即中心标志点,进而利用该中心标记点的空间位置坐标计算出假体和骨上的对应定位标记之间的距离和距离变化。
[0038]
下面以根据本发明的膝关节假体微动检测装置对不同结构的胫骨平台假体进行假体-骨界面微动测量为例进行说明。
[0039]
对于一种大翼结构的胫骨平台假体和一种具有大翼结构及刺入爪的胫骨平台假体,植入胫骨后分别在站立位条件下对胫骨平台假体的前侧、后侧、外侧和内侧共四个部位
的微动量进行实时测量,分别得到两种胫骨平台假体在不同位置的微动及其平均值和标准差如下:表1:不同结构平台与人胫骨不同位置的微动表2:不同结构平台与人胫骨不同位置的微动平均值及标准差由此可以得出的检测结论包括:(1)对于两种胫骨平台假体,不同部位的微动量不同,但都符合:内侧《前侧《后侧《外侧;(2)具有刺入爪结构的胫骨平台假体具有明显更好的抗微动性能,因此植入人体后具有更好的初始稳定性,有利于骨长入。
[0040]
本发明中应用了具体实施例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
[0041]
本领域的普通技术人员将会意识到,这里所述的实施例是为了帮助读者理解本发明的原理,应被理解为本发明的保护范围并不局限于这样的特别陈述和实施例。本领域的普通技术人员可以根据本发明公开的这些技术启示做出各种不脱离本发明实质的其它各种具体变形和组合,这些变形和组合仍然在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1