一种基于激光投影的桥梁挠度测量系统及测量方法
本发明属于桥梁测量,具体涉及一种基于激光投影的桥梁挠度测量系统及测量方法。
背景技术:
1、桥梁在施工和运营过程中都会产生变形,这些变形在一定限度内是正常的,但如果超过了规定限度,就会影响正常使用并危及桥梁安全和生命安全,因此在施工和运营期间需要对桥梁参数进行测量,挠度是其中关键桥梁参数之一。
2、目前桥梁挠度测量主要应用的方法有水准高程法、机器人监测法、倾角仪法、连通管法,测量过程往往需要多人配合完成,且参数均为人工记录计算,测量过程繁琐,效率低下,测量精度与测量人员技术水平相关联,因此存在成本高昂、需要投入大量人力的弊端。
技术实现思路
1、本发明旨在解决桥梁挠度的高效测量问题,提出一种基于激光投影的桥梁挠度测量系统及测量方法。
2、为实现上述目的,本发明通过以下技术方案实现:
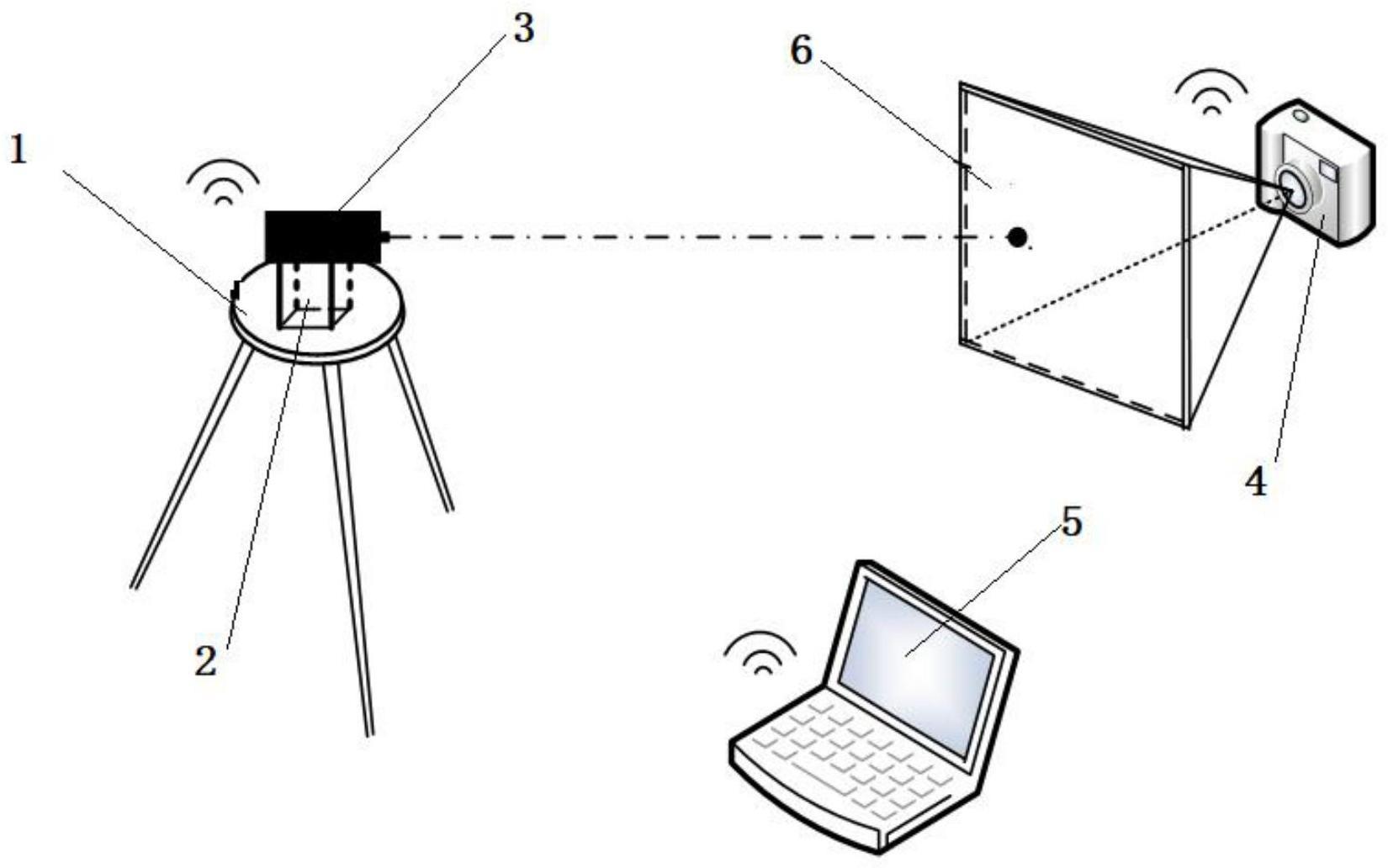
3、一种基于激光投影的桥梁挠度测量系统,包括角度倾斜台、步进电机、激光自动调平、追踪装置、激光光斑识别装置、上位机、激光靶标;
4、所述角度倾斜台连接步进电机,所述步进电机连接激光自动调平、追踪装置,所述激光自动调平、追踪装置发射的激光信号到激光靶标上,所述激光自动调平、追踪装置、激光光斑识别装置、上位机间通过无线信号进行数据传输。
5、进一步的,所述激光自动调平、追踪装置包括stm32f103zet6主控开发板、as32-ttl-1w无线传输模块、scl3300倾角传感器、测温探头、精密分度盘模块、继电器模块、步进电机模块、激光模块;
6、所述stm32f103zet6主控开发板通过scl通信连接scl3300倾角传感器;所述stm32f103zet6主控开发板通过串口连接as32-ttl-1w无线传输模块;所述stm32f103zet6主控开发板通过8路io口分别连接步进电机模块和精密分度盘模块;所述stm32f103zet6主控开发板通过1路io口与测温探头进行单总线数字通信;所述stm32f103zet6主控开发板通过1路io口连接继电器模块,所述继电器模块连接激光模块;所述激光自动调平、追踪装置采用5v直流进行供电;
7、所述步进电机模块为步进电机28byj4模块,精密分度盘模块为精密分度盘rts9060模块,所述测温探头为ds18b20温度传感器,所述继电器模块为单路继电器模块,用于控制激光模块的开关状态,所述继电器模块使用激光自动调平、追踪装置的5v直流电源供电。
8、进一步的,所述激光光斑识别装置包括stm32f103rct6开发板、oled液晶显示屏、拉线位移传感器、openmv模块、lora无线串口模块、uwb超宽带无线测距模块,所述stm32f103rct6开发板分别连接oled液晶显示屏、拉线位移传感器、openmv模块、lora无线串口模块、uwb超宽带无线测距模块,所述激光光斑识别装置采用5v直流进行供电;
9、所述uwb超宽带无线测距模块的个数为3个,其中2个作为基站进行位置确定,1个用于激光光斑识别装置作为标签识别。
10、进一步的,所述激光靶标通过直线导轨进行固定和滑动。
11、一种基于激光投影的桥梁挠度测量方法,依托于所述的一种基于激光投影的桥梁挠度测量系统实现,包括如下步骤:
12、s1、设置基站:首先根据的桥梁的桥面宽度确定2个基站端和基准点的位置,将2个uwb超宽带无线测距模块作为基站分别置于2个基站端,以1个基站端为坐标原点,以2个基站端的连线为x轴建立坐标系,采集基站端和基准点的坐标信息,完成2个基站的设置;
13、s2、设置激光自动调平、追踪装置:根据待测点和标准点的相对位置设置激光自动调平、追踪装置,确保激光自动调平、追踪装置的激光光束照射到激光靶标上,并且通过激光光斑识别装置的uwb超宽带无线测距模块测量激光自动调平、追踪装置的坐标,记为(x0,y0);
14、s3、设置激光光斑识别装置:将激光光斑识别装置设置在待测点,激光自动调平、追踪装置进行激光自动追踪和激光光束的自动调平;
15、s4、激光光斑识别装置进行测量,计算激光光斑在激光靶标的相对高度h;
16、s5、对步骤s4测量的激光光斑在激光靶标的相对高度h进行误差补偿,得到基于激光投影的桥梁挠度的测量结果;
17、s6、将步骤s5得到的基于激光投影的桥梁挠度的测量结果发送到上位机,进行显示并存储测量结果。
18、进一步的,步骤s1的两个基站的摆放位置与桥面的横向切面保持平行,且处在基准点两侧,设置两个基站到基准点的距离相同。
19、进一步的,步骤s3的具体实现方法包括如下步骤:
20、s3.1、将激光光斑识别装置设置在待测点,激光光斑识别装置中的uwb无线测距模块作为标签测量与基站的距离,计算激光光斑识别装置的二维坐标信息(x,y),计算公式为:
21、
22、
23、其中,l1和l2分别为标签与2个基站的距离,i为2个基站间的距离;
24、s3.2、计算激光光束与激光光斑识别装置的夹角θ,计算公式为:
25、
26、s3.3、控制激光自动调平、追踪装置的精密分度盘模块转动θ度,使得激光光斑投影在激光靶标上,完成激光自动调平、追踪装置的激光自动追踪;
27、s3.4、控制激光自动调平、追踪装置向scl3300倾角传感器发送指令,采集激光模块所在平面的x轴的倾角值ζx,y轴的倾角值ζy,并根据ζy计算步进电机转动的步数n,计算公式为:
28、
29、通过控制角度倾斜台使得激光模块所在平面完成初级调平,将ζx,ζy通过无线模块发送给激光光斑识别装置。
30、进一步的,步骤s4的具体实现方法包括如下步骤:
31、s4.1、激光光斑识别装置的stm32f103rct6开发板通过串口向openmv模块发出指令,进行图像的获取、处理激光光斑的识别,根据openmv模块中集成的find_blobs()函数,识别激光光斑及激光光斑中心坐标(xc,yc);
32、s4.2、将激光光斑中心坐标信息通过串口发送给stm32f103rct6开发板,并计算出激光光斑在激光靶标的相对高度h,计算公式为:
33、h=yc*300/800。
34、进一步的,步骤s5的具体实现方法包括如下步骤:
35、s5.1、设置激光模块与scl3300倾角传感器所在平面的夹角为α,激光模块垂直投影在该平面的投影线与scl3300倾角传感器y轴的夹角为β;
36、s5.2、步骤s3中采集激光模块所在平面的x轴的倾角值ζx,y轴的倾角值ζy,计算倾角传感器所在的平面与水平面的夹角δ1,计算公式为:
37、cosδ12=cosζx2+cosζy2-1
38、s5.3、设scl3300倾角传感器所在平面与水平面相交与直线l,设垂直于直线l且存在于倾角传感器所在平面内的直线为p,倾角传感器的y轴与直线p所形成的夹角为γ,则计算公式为:
39、
40、s5.4、由于存在安装误差,激光模块所在直线与scl3300倾角传感器所在平面存在夹角,设过交线l与激光光束所在线段的平面为s,且平面s与倾角传感器所在平面形成的夹角为δ2;
41、若ζx为正值,则计算公式为:
42、
43、设存在于平面s内且垂直于直线l的直线为k,激光模块所在直线与直线k所形成的夹角为θ,则计算公式为:
44、sinθ=cosα*sin(γ+β)
45、若ζx为负值,则计算公式为:
46、
47、sinθ=cosα*sin(γ-β);
48、s5.5、设平面s与水平面的夹角为δ,则计算公式为:
49、δ=δ2-δ1
50、设激光模块所在直线与水平面的夹角λ,则计算公式为:
51、cosλ2=cosα2+sinθ2*(1-cosδ2);
52、s5.6、设置激光与靶标的距离为e,则安装误差为u,则计算公式为:
53、u=e*tanλ;
54、则得到所述的一种基于激光投影的桥梁挠度挠度值为h+u,完成测量。
55、本发明的有益效果:
56、本发明所述的一种基于激光投影的桥梁挠度测量系统,激光自动调平、追踪装置会发射水平的激光光束并投影到激光光斑识别装置中的靶标上,光斑识别装置跟随待测点进行移动,并通过摄像头进行光斑识别,随着待测点挠度的不同,投影在激光靶标上的激光光斑相对位置会发生变化。因此,可以通过测量标准点与各待测点的光斑在靶标上的相对位置的变化来测量挠度值,并通过激光自动调平、追踪装置实现激光光束对激光靶标的自动追踪和激光光束的自动调平,实现了通过智能自动化系统,测量过程只需要单人携带激光靶标移动到各个测点即可自动测出挠度值。在保证测量精度的前提下,可以实现自动测量并实时的将测量结果上传至云端或移动设备端,实现了节省人力物力的同时大大的提高了测量的效率。
- 还没有人留言评论。精彩留言会获得点赞!