一种沉管管节间三向变形监测装置及监测方法与流程
本发明涉及沉管隧道施工监测领域,尤其涉及一种沉管管节间三向变形监测装置及监测方法。
背景技术:
1、沉管管节间变形高精度测量手段难以测得管节间三向变形规律,但管节间高精度测量是管节长期稳定分析的重要数据支撑,现阶段较为准确的三向变形监测分别为前后管节全站仪棱镜观测和三向位移计监测。其中全站仪观测精度最大约为0.3mm,难以提升精度,且其测量频率难以达到分钟级,测量较为繁琐;使用三向位移计进行监测,当某一方向发生大的变形,会导致其余方向测值产生小倍数变化,不适用于大变形及长期监测。
技术实现思路
1、本发明为解决上述问题提供了一种沉管管节间三向变形监测装置及监测方法。
2、本发明所采取的技术方案:
3、一种沉管管节间三向变形监测装置,包括接触式测量结构或非接触式测量结构。
4、所述的接触式测量结构包括两个支架、转角仪、倾角仪和位移计,两个支架分别固定在拟固定管节和拟移动管节相对的侧壁上,两个支架的端头处重叠,与拟移动管节连接的支架上设置转角仪,位移计的一端连接在转角仪上,位移计的另一端通过万向节连接在与拟固定管节连接的支架上,位移计上安装倾角仪。
5、所述的非接触式测量结构包括两个支架、三向激光测距仪、三向测距靶面和磁铁,两个支架分别固定在拟固定管节和拟移动管节相对的侧壁上,三向激光测距仪的顶部通过万向球铰接在与拟移动管节连接的支架上,磁铁设置在三向激光测距仪上,磁铁与万向球位于同一水平面上,与拟固定管节连接的支架上设置三向测距靶面,三向测距靶面分别与拟移动管节局部坐标系方向一致,三向测距靶面朝向拟固定管节的一侧面为带磁面,磁铁与带磁面配合确定y轴方向。
6、所述的倾角仪安装时°指向拟移动管节y轴方向。
7、所述的倾角仪与转角仪的轴线相互平行。
8、所述的位移计拉伸变化量端布设在拟移动端管节端。
9、所述的三向激光测距仪距三向测距靶面的距离为测量量程中间位置。
10、一种利用沉管管节间三向变形监测装置进行变形监测的方法,利用接触式测量结构进行变形监测的步骤为:
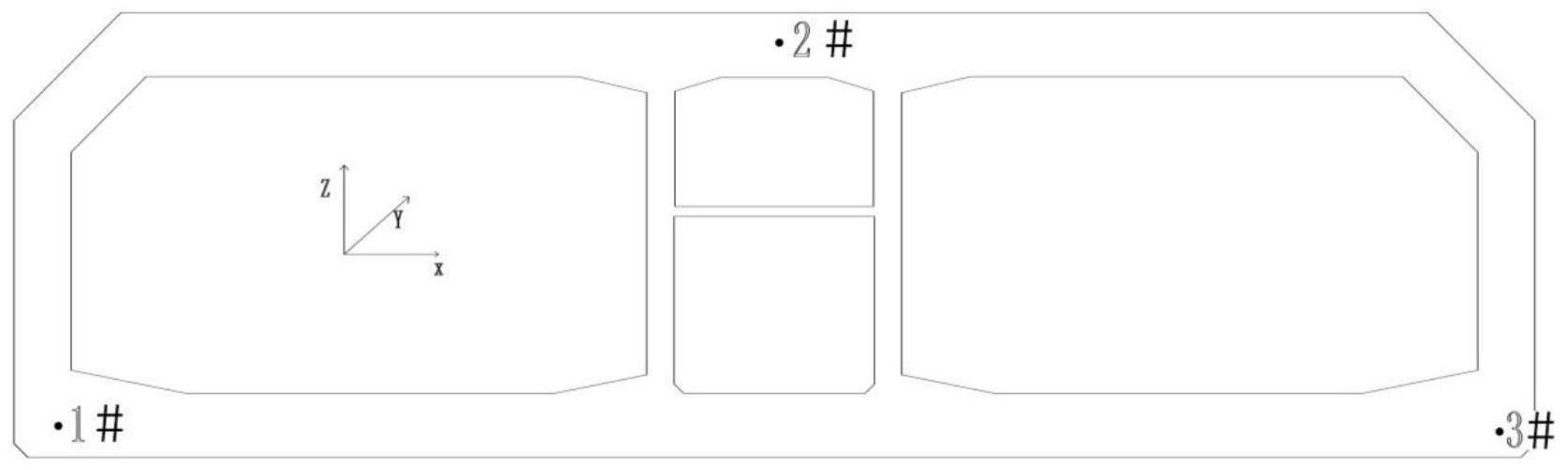
11、s1.安装点位标定:在拟移动管节结合面初步选择底部两侧及上部各一个点,以1#点坐标为(0,0,0),3#点为x向点,测得2#点坐标(x2’,y2’,z2’)、3#点坐标(x3’,0,z3’),同时在此局部坐标系下测得后期需要得到的其他特征点坐标(xa,ya,za);
12、s2.支架点标定:将拟移动管节连接的支架原位贴合,测得1#、2#、3#点位支架节点坐标分别为(x1,y1,z1)、(x2,y2,z2)、(x3,y3,z3);
13、s3.接触式监测结构初始设置:拟移动管节安装完成后,先安装拟移动管节连接的支架及相应的转角仪、倾角仪和位移计,然后安装拟固定管节连接的支架及万向节,通过万向节与位移计连接,待安装完成后检测安装结构,使得安装后效果满足结构设计要求;
14、s4.接触式单点三维变形测量并计算:
15、a.安装前后传感器已知测值确定:位移计安装前为拉伸或压缩状态下游标卡尺测量位移计两头距离,1#点位位移计传感器长l1,同时测得位移计测值为l10,安装完成后测得位移计测值为l100;安装完成后测得转角值为θ转10,并确定转动正方向,转动正方向为顺时针方向,即y轴绕z轴转到x轴方向为正;安装完成后测得倾角值为θ倾10,并确定倾角正方向,倾角正方向为移动端远离固定端倾角方向为正;
16、b.安装完成后,拟移动管节连接的支架相对拟固定管节连接的支架孔的空间几何关系为
17、c.安装完成后1#点位第n次测量值:位移计测值l1n,转角值为θ转1n,倾角值为θ倾1n。此时拟移动管节连接的支架相对拟固定管节连接的支架孔的空间几何关系为
18、d.1#点拟移动管节(1)上的支架孔三向变形值为
19、e.同理计算得到2#和3#三向变形值。
20、一种利用沉管管节间三向变形监测装置进行变形监测的方法,利用非接触式测量结构进行变形监测的步骤为:
21、p1.安装点位标定:在拟移动管节结合面初步选择底部两侧及上部各一个点,以1#点坐标为(0,0,0),3#点为x向点,测得2#点坐标(x2’,y2’,z2’)、3#点坐标(x3’,0,z3’),同时在此局部坐标系下测得后期需要得到的其他特征点坐标(xa,ya,za);
22、p2.支架点标定:将拟移动管节连接的支架原位贴合,测得1#、2#、3#点位支架节点坐标分别为(x1,y1,z1)、(x2,y2,z2)、(x3,y3,z3);
23、p3.非接触式监测结构初始设置:拟移动管节(1)安装完成后,先安装拟移动管节连接的支架及相应的三向激光测距仪、磁铁,然后安装拟固定管节连接的支架及三向测距靶面,待安装完成后检测安装结构,使得安装后效果满足结构设计要求;
24、p4.非接触式单点三维变形测量并计算:
25、a.1#测点传感器安装完成后,初次测得测点与标靶距,得相对空间关系为(δx10,δy10,δz10),正式测量时,测得测点与标靶距,得相对空间关系为(δx1n,δy1n,δz1n);
26、b.1#三向测距仪三向变形值为
27、c.同理计算得到2#和3#三向变形值;
28、p5.整体面计算三维变形:
29、a.以拟移动管节为刚性,假定1#点位为转动中心,移动坐标原点建立一个新的局部坐标系,利用2#和3#三向变形计算得到三向转角值;
30、b.假定1#点(x1,y1,z1)位为转动中心,刚体三向移动变形为(δx1n,δy1n,δz1n),2#测点在局部坐标系坐标下初始和正常测量坐标分别为(χ2-χ1,y2-y1,z2-z1)和(x2-x1+δx2n-δχ1n,y2-y1+δy2n-δy1n,z2-z1+δz2n-δz1n),3#测点在局部坐标系坐标下初始和正常测量坐标分别为(x31x1,y3-y1,z3-z1)和(x3-x1+δx3n-δx1n,y3-y1+δy3n-δy1n,z3-z1+δz3n-δz1n);
31、c.转角方向以右手法则为正方向求欧拉角:由1#、3#测点计算绕z轴转角θxy,由几何对应关系进而求得绕z轴转角同理,由1#、3#测点计算绕y轴转角同理,由1#,2#测点计算绕x轴转角
32、d.计算特征点:己知特征点标定坐标为(xa,ya,za),由c步骤反计算该坐标点三维变形值,a点在局部坐标系坐标下初始和正常测量坐标分别为(xa-x1,ya-y1,za-z1)和(xa-x1+δxa,ya-y1+ya,za-z1+za),即获得(δxa,δya,δza),其中绕某一轴转动,另外两个坐标均会发生变化,由θxy产生的x方向变形由θzx产生的x方向变形同理可计算得到其余两向受转角变化值;
33、e.a点三向变形值为:
34、
35、本发明的有益效果:本发明的变形监测装置结构简单、实用,通过三点确定沉管整体变形,使用精度高,装置制作造价低,监测方法灵活易操作,为管节长期稳定分析提供重要的数据支持,监测装置适用范围广,不仅适用于沉管隧道管节间,还适用于一般结构间的变形监测。
- 还没有人留言评论。精彩留言会获得点赞!