一种用于扫描动车车顶的视觉检测方法及装置与流程
本发明涉及动车安全检测的,具体为一种用于扫描动车车顶的视觉检测方法,本发明还提供了视觉检测所对应的装置。
背景技术:
1、为保证高铁动车的行驶安全,根据动车检修流程和相关要求,每辆动车在48小时之内需要在检修库进行一次一级检修,对动车车底、车侧、车顶等部位进行检查维护。目前动车的库内检修一般以人工检修为主,也有采用检修机器人进行自动检修的方式,但现有的检修机器人均只能对车底进行检修,车顶目前尚无自动化检修手段。车顶检修一方面存在供电线上高压电的影响,人工检无法带电操作,影响检修效率;另一方面人工检存在遗落工具、遗落材料等人为操作失误的影响,为列车运营带来巨大安全隐患。因此,需要一种自动化的车顶检修方法,在库内人工检完成后,对车顶进行一次全方位的扫描检查,确保所有故障均已完成维护,且不存在工具、材料遗落等安全隐患。
技术实现思路
1、针对上述问题,本发明提供了一种用于扫描动车车顶的视觉检测方法,其利用机器视觉和人工智能的算法对动车车顶状态进行检测,提高检修效率。
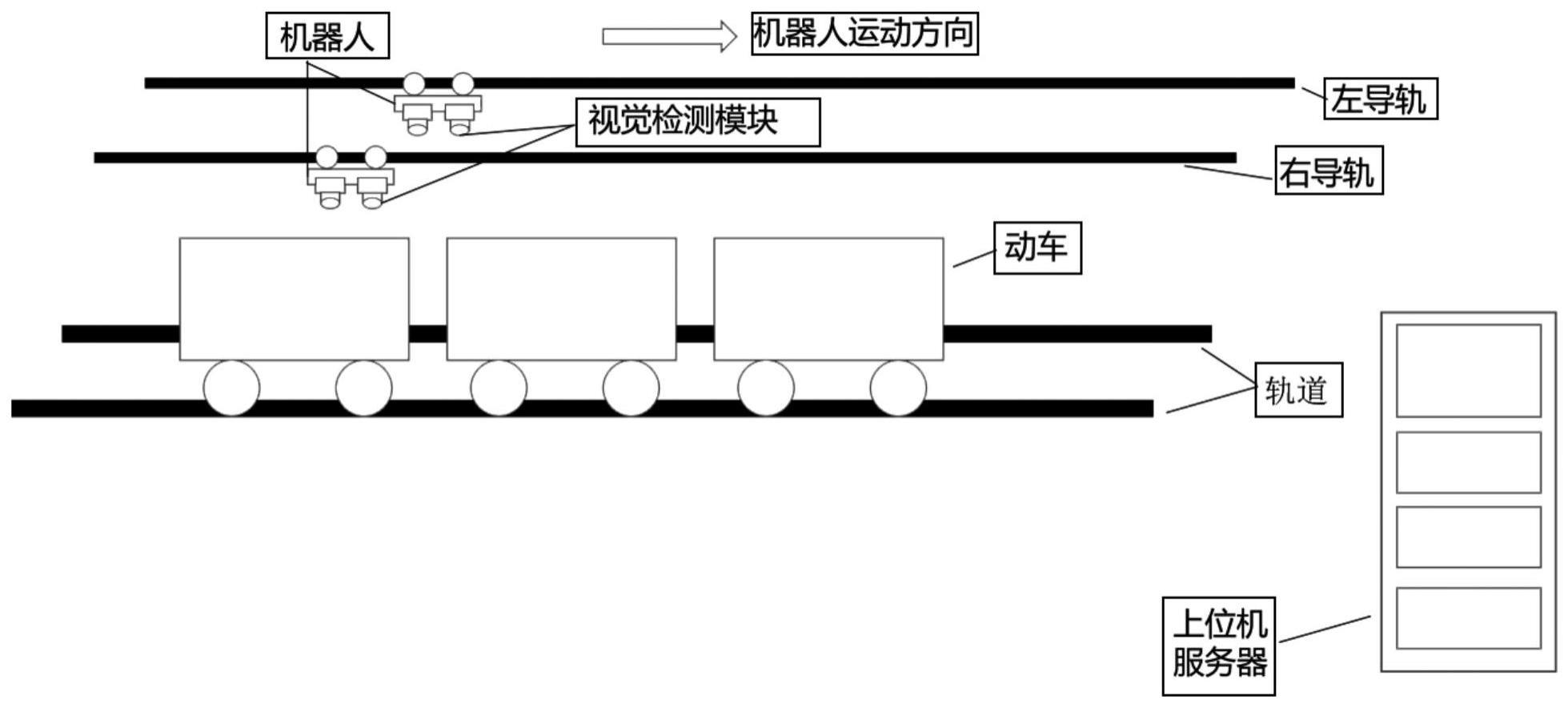
2、一种用于扫描动车车顶的视觉检测方法,其特征在于:在动车检修库车顶设置导轨,导轨平行于下方轨道安装,在导轨上部署带有视觉检测模块的机器人,机器人沿着导轨往复运动,机器人在运动过程中对动车车顶通过视觉模块进行扫描检测,分别获得动车车顶的三维点云和二维图像,利用机器视觉和人工智能算法对动车车顶状态进行检测;
3、上位机服务器与机器人进行通讯联系,当收到检测机器人的检测数据后,运行数据处理算法,通过机器视觉和深度学习算法对车顶三维点云数据和二维图像数据进行处理,识别并判断车顶故障状态以及操作工具、材料之类异物遗落情况,并将检测结果在显示器上进行显示。
4、其进一步特征在于:
5、当仅在车顶设置一列导轨时,每个机器人的视觉检测模块包含激光3d传感器以及工业相机,激光3d传感器用于测量车顶的三维点云,工业相机获取车顶的图像信息;
6、当在车顶设置两列导轨时,两列导轨间隔平行布置,每对机器人同步移动组合布置,每个机器人的视觉检测模块仅包括面阵工业相机,从而构成双目视觉测量系统。
7、其更进一步特征在于:
8、对检修库内的同一轨道区域,通过部署多组检测机器人的方式同步并行采集,从而提高一辆动车的车顶检测效率,缩短检测时间;
9、机器人通过内置电池独立供电、并基于wifi进行无线数据传输。
10、一种用于扫描动车车顶的视觉检测装置,其特征在于,其包括:
11、导轨,导轨设置于动车检修库车顶位置、且平行于轨道安装;
12、机器人,所述机器人带有视觉检测模块,所述视觉检测模块朝向下布置;
13、以及上位服务器;
14、所述视觉检测模块在机器人移动过程中获得动车车顶的三维点云和二维图像,所述机器人通过通讯模块传递检测数据至所述上位服务器,上位机服务器收到检测机器人的检测数据后,运行数据处理算法,通过机器视觉和深度学习算法对车顶三维点云数据和二维图像数据进行处理,识别并判断车顶故障状态以及操作工具、材料之类异物遗落情况,并将检测结果在显示器上进行显示。
15、其进一步特征在于:
16、当导轨为一根时,每个机器人的视觉检测模块包含激光3d传感器以及工业相机;
17、所述工业相机为线阵相机,通过扫描拼接方式获得整节车厢的车顶完整图像;
18、当导轨为两根时,两列导轨平行间隔布置,分列于不同轨道的相同位置的机器人组合形成一对机器人,每个机器人的视觉检测模块包括有一个面阵工业相机,两个面阵工业相机构成双目测量系统,通过机器人控制保证左右机器人运动同步和采集同步,使得运动中两个相机的相对位置关系保持恒定,且图像采集时间一致;
19、机器人采用电池独立供电和基于wifi的无线数据传输方式;
20、当机器人的视觉检测模块进行扫描检测时,视觉检测模块的检测数据预先存储于机器人内部存储空间,并记录数据时间戳,检测完成后将数据通过wifi传递至上位机处理系统进行处理运算。
21、采用本发明后,在导轨上部署带有视觉检测模块的机器人,机器人沿着导轨往复运动,机器人在运动过程中对动车车顶通过视觉模块进行扫描检测,分别获得动车车顶的三维点云和二维图像,利用机器视觉和人工智能算法对动车车顶状态进行检测;其可用于对动车车顶状态的自动识别判断,指导后续人工检修,提高检修准备效率,也可用于在人工检修之后,对车顶状态的进一步检查,确保所有故障已完成维护,同时没有操作工具和材料的遗落。
技术特征:
1.一种用于扫描动车车顶的视觉检测方法,其特征在于:在动车检修库车顶设置导轨,导轨平行于下方轨道安装,在导轨上部署带有视觉检测模块的机器人,机器人沿着导轨往复运动,机器人在运动过程中对动车车顶通过视觉模块进行扫描检测,分别获得动车车顶的三维点云和二维图像,利用机器视觉和人工智能算法对动车车顶状态进行检测;
2.如权利要求1所述的一种用于扫描动车车顶的视觉检测方法,其特征在于:当仅在车顶设置一列导轨时,每个机器人的视觉检测模块包含激光3d传感器以及工业相机,激光3d传感器用于测量车顶的三维点云,工业相机获取车顶的图像信息。
3.如权利要求1所述的一种用于扫描动车车顶的视觉检测方法,其特征在于:当在车顶设置两列导轨时,两列导轨间隔平行布置,每对机器人同步移动组合布置,每个机器人的视觉检测模块仅包括面阵工业相机,从而构成双目视觉测量系统。
4.如权利要求1所述的一种用于扫描动车车顶的视觉检测方法,其特征在于:对检修库内的同一轨道区域,通过部署多组检测机器人的方式同步并行采集,从而提高一辆动车的车顶检测效率,缩短检测时间。
5.如权利要求1所述的一种用于扫描动车车顶的视觉检测方法,其特征在于:机器人通过内置电池独立供电、并基于wifi进行无线数据传输。
6.一种用于扫描动车车顶的视觉检测装置,其特征在于,其包括:
7.如权利要求6所述的一种用于扫描动车车顶的视觉检测装置,其特征在于:当导轨为一根时,每个机器人的视觉检测模块包含激光3d传感器以及工业相机。
8.如权利要求7所述的一种用于扫描动车车顶的视觉检测装置,其特征在于:所述工业相机为线阵相机,通过扫描拼接方式获得整节车厢的车顶完整图像。
9.如权利要求6所述的一种用于扫描动车车顶的视觉检测装置,其特征在于:当导轨为两根时,两列导轨平行间隔布置,分列于不同轨道的相同位置的机器人组合形成一对机器人,每个机器人的视觉检测模块包括有一个面阵工业相机,两个面阵工业相机构成双目测量系统,通过机器人控制保证左右机器人运动同步和采集同步,使得运动中两个相机的相对位置关系保持恒定,且图像采集时间一致。
10.如权利要求6所述的一种用于扫描动车车顶的视觉检测装置,其特征在于:当机器人的视觉检测模块进行扫描检测时,视觉检测模块的检测数据预先存储于机器人内部存储空间,并记录数据时间戳,检测完成后将数据通过wifi传递至上位机处理系统进行处理运算。
技术总结
本发明提供了一种用于扫描动车车顶的视觉检测方法,其利用机器视觉和人工智能的算法对动车车顶状态进行检测。在动车检修库车顶设置导轨,导轨平行于下方轨道安装,在导轨上部署带有视觉检测模块的机器人,机器人沿着导轨往复运动,机器人在运动过程中对动车车顶通过视觉模块进行扫描检测,分别获得动车车顶的三维点云和二维图像,利用机器视觉和人工智能算法对动车车顶状态进行检测;上位机服务器与机器人进行通讯联系,当收到检测机器人的检测数据后,运行数据处理算法,通过机器视觉和深度学习算法对车顶三维点云数据和二维图像数据进行处理,识别并判断车顶故障状态以及操作工具、材料之类异物遗落情况,并将检测结果在显示器上进行显示。
技术研发人员:王欢,李苏祺,王满意,孙亚平,黄磊
受保护的技术使用者:江苏集萃智能光电系统研究所有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!