地图构建优化方法、装置、电子设备及可读存储介质与流程
本技术涉及数据处理,尤其涉及一种地图构建优化方法、装置、电子设备及可读存储介质。
背景技术:
1、目前,通常通过激光雷达数据和预设建图算法,以构建地图,具体地,根据激光数据构建至少两个单位图,根据雷达数据和各单位图对应的位姿,构建目标地图。由于激光雷达数据可能存在不稳定,且分辨率较低,构建得到的目标地图可能存在毛刺边缘直线、重影或者不笔直的线的情况,从而导致地图构建不准确。
技术实现思路
1、本技术的主要目的在于提供一种地图构建优化方法、装置、电子设备及可读存储介质,旨在解决现有技术中地图构建不准确的技术问题。
2、为实现上述目的,本技术提供一种地图构建优化方法,所述地图构建优化方法包括:
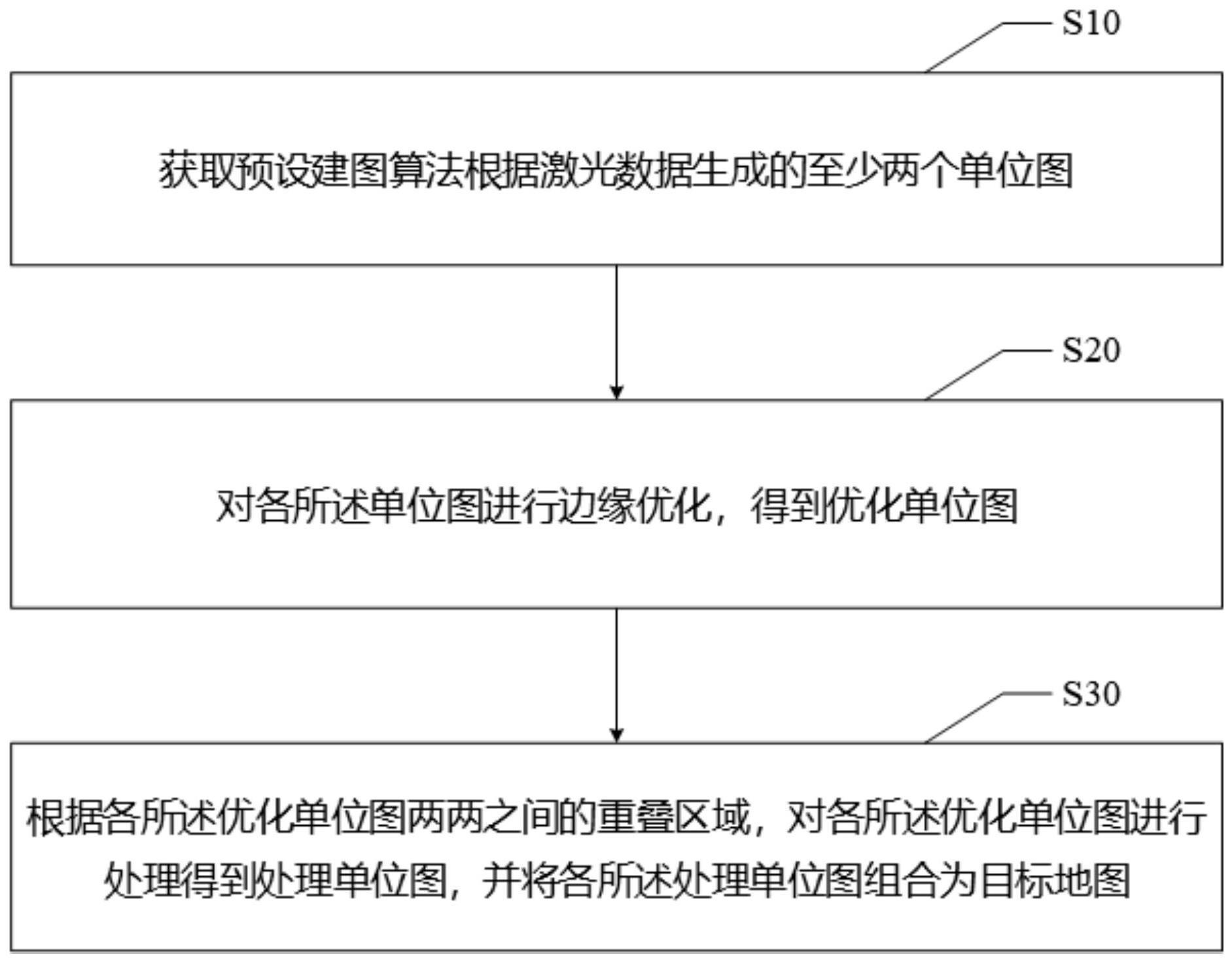
3、获取预设建图算法根据激光数据生成的至少两个单位图;
4、对各所述单位图进行边缘优化,得到优化单位图;
5、根据各所述优化单位图两两之间的重叠区域,对各所述优化单位图进行处理得到处理单位图,并将各所述处理单位图组合为目标地图。
6、可选地,在所述获取预设建图算法根据激光数据生成的至少两个单位图的步骤之前,还包括:
7、对所述激光数据进行噪点去除,得到处理激光数据;
8、对所述处理激光数据进行直线拟合处理,得到拟合直线点;
9、根据所述拟合直线点对应的坐标,对所述处理激光数据进行替换,得到目标激光数据,以供所述预设建图算法根据所述目标激光数据生成至少两个单位图。
10、可选地,所述对各所述单位图进行边缘优化,得到优化单位图的步骤包括:
11、将各所述单位图以预设倍数放大,得到放大单位图;
12、获取激光原点,在各所述放大单位图中将所述激光原点与各所述拟合直线点相连,得到连线区域;
13、清除处于所述连线区域中的激光数据,以对各所述放大单位图进行边缘优化,将各所述放大单位图以所述预设倍数缩小,得到所述优化单位图。
14、可选地,所述根据各所述优化单位图两两之间的重叠区域,对各所述优化单位图进行处理得到处理单位图的步骤包括:
15、在各所述优化单元图中筛选第一单位图组;
16、根据所述第一单位图组中各优化单位图两两之间的重叠区域,对所述第一单位图组进行处理,得到第一处理单位图组;
17、在各所述优化单位图中选取与所述第一处理单位图组相邻的第二单位图;
18、根据所述第一处理单位图组,对所述第二单位图进行处理,得到第二处理单位图,并将所述第二处理单位图加入所述第一处理单位图组;
19、返回执行所述在各所述优化单位图中选取与所述第一处理单位图组相邻的第二单位图的步骤以及后续步骤,直至各所述优化单位图均选取完毕。
20、可选地,所述在各所述优化单元图中筛选第一单位图组的步骤包括:
21、获取各所述优化单元图在所述预设建图算法构建得到的全局地图的相对位置信息;
22、在各所述优化单元图中选取所述相对位置信息满足预设相对位置条件的第一单位图组。
23、可选地,所述第一单位图组包括第一单位子图和第二单位子图,所述第一处理单位图组包括第一处理单位子图和第二处理单位子图,
24、所述根据所述第一单位图组中各优化单位图两两之间的重叠区域,对所述第一单位图组进行处理,得到第一处理单位图组的步骤包括:
25、将所述第一单位子图转换为第一点云数据,以及将所述第二单位子图转换为第二点云数据;
26、获取所述第一单位子图和所述第二单位子图之间的重叠区域内的所述第一单位子图对应的第三点云数据以及所述第二单位子图对应的第四点云数据;
27、根据所述第三点云数据和所述第四点云数据之间的第一转换关系以及所述第一单位子图与所述预设建图算法构建得到的全局地图之间的第二转换关系,确定所述第二单位子图与所述全局地图之间的第三转换关系;
28、根据所述第二转换关系,将所述第一点云数据转换为第五点云数据,得到第一处理单位子图,以及,根据所述第三转换关系,将所述第二点云数据转换为第六点云数据,得到第二处理单位子图。
29、可选地,所述将各所述处理单位图组合为目标地图的步骤包括:
30、将各所述处理单位图进行聚类组合,得到聚类地图;
31、对所述聚类地图进行二维化处理,得到目标地图。
32、为实现上述目的,本技术还提供一种地图构建优化装置,所述地图构建优化装置包括:
33、获取模块,用于获取预设建图算法根据激光数据生成的至少两个单位图;
34、优化模块,用于对各所述单位图进行边缘优化,得到优化单位图;
35、处理模块,用于根据各所述优化单位图两两之间的重叠区域,对各所述优化单位图进行处理得到处理单位图,并将各所述处理单位图组合为目标地图。
36、可选地,在所述获取预设建图算法根据激光数据生成的至少两个单位图的步骤之前,所述地图构建优化装置还用于:
37、对所述激光数据进行噪点去除,得到处理激光数据;
38、对所述处理激光数据进行直线拟合处理,得到拟合直线点;
39、根据所述拟合直线点对应的坐标,对所述处理激光数据进行替换,得到目标激光数据,以供所述预设建图算法根据所述目标激光数据生成至少两个单位图。
40、可选地,所述优化模块还用于:
41、将各所述单位图以预设倍数放大,得到放大单位图;
42、获取激光原点,在各所述放大单位图中将所述激光原点与各所述拟合直线点相连,得到连线区域;
43、清除处于所述连线区域中的激光数据,以对各所述放大单位图进行边缘优化,将各所述放大单位图以所述预设倍数缩小,得到所述优化单位图。
44、可选地,所述处理模块还用于:
45、在各所述优化单元图中筛选第一单位图组;
46、根据所述第一单位图组中各优化单位图两两之间的重叠区域,对所述第一单位图组进行处理,得到第一处理单位图组;
47、在各所述优化单位图中选取与所述第一处理单位图组相邻的第二单位图;
48、根据所述第一处理单位图组,对所述第二单位图进行处理,得到第二处理单位图,并将所述第二处理单位图加入所述第一处理单位图组;
49、返回执行所述在各所述优化单位图中选取与所述第一处理单位图组相邻的第二单位图的步骤以及后续步骤,直至各所述优化单位图均选取完毕。
50、可选地,所述处理模块还用于:
51、获取各所述优化单元图在所述预设建图算法构建得到的全局地图的相对位置信息;
52、在各所述优化单元图中选取所述相对位置信息满足预设相对位置条件的第一单位图组。
53、可选地,所述第一单位图组包括第一单位子图和第二单位子图,所述第一处理单位图组包括第一处理单位子图和第二处理单位子图,所述处理模块还用于:
54、将所述第一单位子图转换为第一点云数据,以及将所述第二单位子图转换为第二点云数据;
55、获取所述第一单位子图和所述第二单位子图之间的重叠区域内的所述第一单位子图对应的第三点云数据以及所述第二单位子图对应的第四点云数据;
56、根据所述第三点云数据和所述第四点云数据之间的第一转换关系以及所述第一单位子图与所述预设建图算法构建得到的全局地图之间的第二转换关系,确定所述第二单位子图与所述全局地图之间的第三转换关系;
57、根据所述第二转换关系,将所述第一点云数据转换为第五点云数据,得到第一处理单位子图,以及,根据所述第三转换关系,将所述第二点云数据转换为第六点云数据,得到第二处理单位子图。
58、可选地,所述处理模块还用于:
59、将各所述处理单位图进行聚类组合,得到聚类地图;
60、对所述聚类地图进行二维化处理,得到目标地图。
61、本技术还提供一种电子设备,所述电子设备包括:存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的所述地图构建优化方法的程序,所述地图构建优化方法的程序被处理器执行时可实现如上述的地图构建优化方法的步骤。
62、本技术还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有实现地图构建优化方法的程序,所述地图构建优化方法的程序被处理器执行时实现如上述的地图构建优化方法的步骤。
63、本技术还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述的地图构建优化方法的步骤。
64、本技术提供了一种地图构建优化方法、装置、电子设备及可读存储介质,相比于通过激光雷达数据和预设建图算法,以构建地图,本技术通过获取预设建图算法根据激光数据生成的至少两个单位图;对各所述单位图进行边缘优化,得到优化单位图;根据各所述优化单位图两两之间的重叠区域,对各所述优化单位图进行处理得到处理单位图,并将各所述处理单位图组合为目标地图,通过对单位图进行边缘优化以及各优化单位图两两之间重叠处理,可实现对单位图的双重优化,避免了由于激光雷达数据可能存在不稳定,且分辨率较低,构建得到的目标地图可能存在毛刺边缘直线、重影或者不笔直的线情况的技术缺陷,从而提高了地图构建的准确性。
- 还没有人留言评论。精彩留言会获得点赞!