一种基于微透镜阵列的多光谱高分辨成像系统及方法
本发明属于多光谱高分辨成像领域,具体涉及一种基于微透镜阵列的多光谱高分辨成像系统及方法。
背景技术:
1、多光谱技术是能同时获取目标不同波长处空间图像信息的一种成像探测技术,其将成像技术和光谱技术结合,通过分光器件分光,结合狭缝,采用摆扫或推扫的形式,通过多次的扫描,在多个谱段获得目标完整的图像信息。与一般的成像技术相比,光谱信息的引入可以更加精确和细致地识别和探测目标,已经广泛地应用于农业、地质勘测、遥感等领域。
2、傅里叶叠层成像技术是近年来一种发展迅速的新型计算成像技术,它将合成孔径技术与相位恢复技术相结合,通过将成像系统的光瞳移动到不同位置,根据傅里叶频移原理,使得原本被光瞳阻挡的频率信息成功地被探测器所接收,之后将探测器采集到的低分辨率强度信息数据集通过叠层恢复算法得到目标的高分辨率图像。但是目前傅里叶叠层成像技术在远距离成像场景下的应用依然很少,而目前在遥感勘测等领域所采用的多光谱成像技术,通过采集到的不同波段的光谱信息来识别不同的目标,但是由于衍射效应的存在,在不考虑几何像差影响的情况下,理想的物点也不可能在像面得到理想的像点,所以无法实现高分辨率成像。
3、目前,国内外将傅里叶叠层成像技术应用于远距离成像场景的例子屈指可数。dong等人用单个平面波照射样品,搭建了第一个光瞳扫描型傅里叶叠层成像系统;holloway等人将漫反射物体作为成像目标,搭建了一台远距离傅里叶叠层反射成像系统,这是首次将傅里叶叠层成像技术应用于粗糙样本,也是首次提出的真正的远距离傅里叶叠层成像技术的应用。
4、然而,这些技术都是针对远距离目标的重建技术,尚未发现能够实现远距离目标的多光谱成像的技术方案。现有的远距离成像技术,多是通过成像技术与光谱技术的融合,并且系统整体结构多使用高数值孔径成像镜头,视场较小,且由于衍射效应,使得成像分辨率收到系统光瞳尺寸的制约,成像分辨率较低。并且在现有技术下若要提高图像分辨率,需要复杂的光机扫描系统,这不仅会使得成像系统的结构更加复杂,而且在扫描过程中会引入不可忽略的位移误差,从而影响最终的成像分辨率。
技术实现思路
1、为了解决现有技术中存在的上述问题,本发明提供了一种基于微透镜阵列的多光谱高分辨成像系统及方法。本发明要解决的技术问题通过以下技术方案实现:
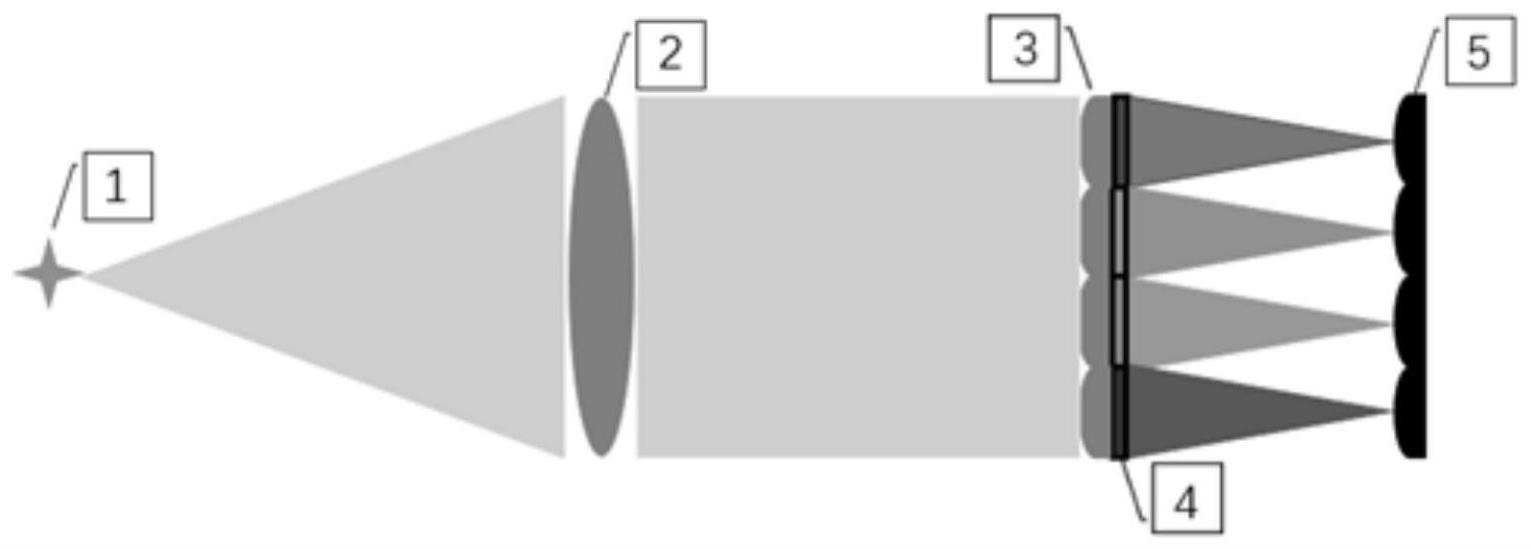
2、本发明提供了一种基于微透镜阵列的多光谱高分辨成像系统,包括:主透镜、微透镜阵列、成像探测器阵列和驱动装置;其中,
3、所述微透镜阵列设置在所述主透镜与所述成像探测器阵列之间;
4、所述微透镜阵列包括多个微透镜,多个微透镜形成圆形阵列,
5、所述微透镜阵列靠近所述成像探测器阵列一侧的端面上设置有滤光片阵列;所述滤光片阵列包括多个不同谱段的滤光片;
6、所述驱动装置与所述微透镜阵列连接,用于调整所述微透镜阵列在垂直于光轴的平面内旋转。
7、本发明提供了一种基于微透镜阵列的多光谱高分辨成像方法,所述多光谱高分辨成像方法应用于多光谱高分辨成像系统,所述多光谱高分辨成像系统,包括:主透镜、微透镜阵列、成像探测器阵列和驱动装置;其中,所述微透镜阵列设置在所述主透镜与所述成像探测器阵列之间;所述微透镜阵列包括多个微透镜,多个微透镜形成圆形阵列,所述微透镜阵列靠近所述成像探测器阵列一侧的端面上设置有滤光片阵列;所述滤光片阵列包括多个不同谱段的滤光片;所述驱动装置与所述微透镜阵列连接,用于调整所述微透镜阵列在垂直于光轴的平面内旋转;
8、所述多光谱高分辨成像方法包括:
9、步骤1:调整所述微透镜阵列在垂直于光轴的平面内旋转,每旋转一次所述成像探测器阵列获取到目标对应的低分辨率多光谱图像,得到低分辨率多光谱图像集;
10、步骤2:利用计算机处理所述低分辨率多光谱图像集,实现多光谱高分辨成像。
11、在本发明的一个实施例中,在所述步骤1中,旋转前后获取的两个低分辨率多光谱图像数据的重叠率不低于38%。
12、在本发明的一个实施例中,所述步骤2包括:
13、步骤2.1:根据目标的目标物函数,得到目标物函数的高分辨率频谱,将其作为待更新频谱;
14、步骤2.2:根据所述待更新频谱,计算得到估计光场;
15、步骤2.3:根据所述低分辨率多光谱图像,对所述估计光场的振幅进行替换,得到替换后的估计光场;
16、步骤2.4:根据所述替换后的估计光场,更新所述待更新频谱;
17、步骤2.5:将更新后的频谱作为新的待更新频谱,重复步骤2.2至步骤2.4,利用每一个低分辨率多光谱图像进行频谱更新,直至优化函数达到预设阈值;
18、步骤2.6:根据最终的更新后的频谱,得到重建的高分辨率多光谱图像。
19、在本发明的一个实施例中,所述目标物函数的高分辨率频谱表示为:
20、o(kx,ky)=f{o(x,y)};
21、式中,o(x,y)表示目标物函数,(x,y)表示目标在物空间的坐标,f表示二维傅里叶变换,(kx,ky)表示目标对应的频域坐标。
22、在本发明的一个实施例中,经过微透镜阵列中第i个微透镜的光在成像探测器阵列对应的低分辨率估计光场表示为:
23、
24、式中,f-1表示二维反傅里叶变换,(kxi,kyi)表示第i个微透镜的物空间中心坐标(x'i,y'i)对应的频域中心坐标,p表示多光谱高分辨成像系统的光瞳函数。
25、在本发明的一个实施例中,所述步骤2.3包括,利用实际采集到的低分辨率多光谱图像的振幅对所述估计光场的振幅进行替换,并保持相位信息不变;
26、其中,第i个微透镜对应的替换后的估计光场表示为:
27、
28、式中,ii(x,y)表示在第i个微透镜的位置处实际采集到的低分辨率多光谱图像的振幅。
29、在本发明的一个实施例中,所述步骤2.4包括,将所述替换后的估计光变换至频域,对所述待更新频谱中相应的子区域进行更新,其他区域保持不变;
30、其中,更新函数表示为:
31、
32、在本发明的一个实施例中,所述优化函数表示为:
33、
34、其中,e表示振幅误差矩阵。
35、与现有技术相比,本发明的有益效果在于:
36、1.本发明的基于微透镜阵列的多光谱高分辨成像系统及方法,提出的基于微透镜阵列的多光谱成像模型,可以突破传统多光谱成像系统中光学衍射极限,提高光学分辨率,实现对远距离目标的高分辨率图像重建,可以从低分辨率图像数据集重建出高分辨率图像;
37、2.本发明的基于微透镜阵列的多光谱高分辨成像系统及方法,提出的基于微透镜阵列的多光谱成像结构,可以通过滤光片阵列分离出多个波段的光,并经过多个成像探测器处理得到同一目标的不同波段的光谱图像,经过计算机处理后可得到目标物的多光谱图像。
38、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!