拉线传感器及包括此种拉线传感器的移动机器的制作方法
1.本公开主要涉及拉线传感器。
背景技术:
2.拉线传感器通常被用于测量线性距离,主要用于跟踪对象的线性移动。拉线传感器通常包括绕在或配置成绕在卷轴、轴杆或轮轴上的导线或测量线。然后,拉线的延伸与线轴、轴杆或轮轴的旋转相对应。在现有技术中,线轴或轮轴通常耦合至电位计,该电位计允许测量指示电位计的旋转角度和导线延伸的电信号。拉线传感器通常应用于工业环境或要求高精度和可靠性的环境中。
3.然而,电位计通常价格昂贵,并且可能难以制造。通常,它们的测量精度和可靠性随时间劣化。特别地,对于非公路车辆和机械以及其他恶劣环境中的应用而言,寻求更便宜且更可靠的解决方案。
技术实现要素:
4.因此,目前提出的创新的目标是设计一种具有经改进的可靠性和鲁棒性、比传统传感器更便宜的拉线传感器。
5.该目标通过一种用于测量线性距离的拉线传感器来解决的,该拉线传感器包括:卷轴、轴杆或轮轴,卷绕在该卷轴、轴杆或轮轴上的导线,以及旋转传感器,其耦合至该卷轴、轴杆或轮轴并被配置成将该旋转传感器的旋转角度转换为电信号,其中该旋转传感器基于隧道磁阻效应。
6.在此提出的用于测量线性距离的拉线传感器包括:
7.卷轴、轴杆或轮轴,
8.卷绕在或配置为卷绕在卷轴、轴杆或轮轴上的导线或测量线,以及
9.旋转传感器,其耦合至卷轴、轴杆或轮轴并配置为将传感器的旋转角度转换为电信号,或者换句话说,配置为产生指示旋转传感器的旋转角度的电信号,其中旋转传感器基于隧道磁阻效应或配置为基于隧道磁阻效应来操作。
10.基于隧道磁阻效应(tmr)或配置为基于隧道磁阻效应(tmr)来操作的磁阻传感器正变得越来越有吸引力,并可用于多种目的。由于它们提供高信号振幅,因此无需额外电路系统,并且在许多情况下不需要前置放大器,就可与微控制器相结合。通常,这些传感器可以很容易地实现高阻抗,并且只需要非常少的空间。因此,tmr传感器通常适用于电池供电的应用。它们通常提供测量的长期稳定性和再现性。它们通常还提供高绝对准确度。基于隧道磁阻效应、具有模拟电信号输出的旋转传感器可以通过隧道磁阻元件和磁体来实现,其中这两个元件中的一者被配置为相对于另一者旋转,并且磁阻元件的电阻被测量。
11.旋转传感器可包括包含隧道磁阻元件的固定部件或固定部分,以及包含磁体的旋转部件或旋转部分。
12.固定部件可包括具有固定磁化方向的磁基准层和磁感测层。感测层的磁化通常遵
循外部场,该外部场可由外部可旋转磁体施加,该磁体可构成传感器的旋转部件的一部分。基准层和感测层之间的薄隔离屏障通常包括像mgo之类的金属氧化物,并且可以足够薄,以供电子通过隧穿穿过该隔离屏障。通常,这种隧道结的电阻严重依赖于基准层和感测层的磁化方向之间的角度。因此,电阻对应于或指示外部可旋转磁体相对于传感器的静止部件的旋转角度。
13.隔离屏障的厚度和面积可根据具体应用来选择。例如,隔离屏障的电阻范围可从欧姆到兆欧姆。因此,可以实现具有低功耗的传感器。磁阻元件的尺寸通常在微米的数量级。因此,这种传感器可能只需要有限的空间。在较长的工作时间期间,磨损通常是可忽略不计的,因为与传统的电位计相比,彼此相对移动的部件之间通常没有摩擦或几乎没有摩擦。此外,温度灵敏度通常较低,这可以是优于传统电位计器的另一优势。
14.旋转传感器的旋转部件可借助于齿轮耦合至卷轴、轴杆或轮轴。这样,它可以确保全可测延伸(即传感器被配置为测量的最大距离)对应于全旋转(即 360度旋转)的所需或预定部分。此外,通过选择由齿轮提供的适当平移或传动比,可以实现所需的测量分辨率。
15.例如,总可测距离和与总可测距离相对应的导线延伸可对应于旋转传感器的旋转部件旋转360度或更小。在特殊情况下,总可测距离也可对应于小于360 度的旋转,例如小于270度或小于180度。
16.旋转传感器可包括配置为保持导线的张力的弹簧。为此,拉线传感器可包括弹簧,诸如螺旋弹簧,该弹簧耦合至传感器的可旋转部件并偏置卷轴、轴杆或轮轴以在其沿卷绕拉线的方向上旋转。这样,拉线的张力可以始终保持。
17.旋转传感器的固定部件可被安装在印刷电路板上。通常,旋转传感器与用于测量磁阻元件的电阻的测量单元电耦合或耦合至测量单元。例如,传感器的静止部件可直接与测量单元耦合或耦合至测量单元。
18.因此,用于测量磁阻元件的电阻的测量单元通常可以经由印刷电路板上的导体与磁阻元件容易地接触,并且所有电连接可以实现为印刷电路板上的印刷或蚀刻导体。这样,测量电阻中涉及的所有电接触通常特别可靠和稳定。印刷电路板(pcb)可包括对于敏感电阻测量所需的所有电路系统。
19.此外,在一些情况下,测量单元可以包括测量桥,例如惠斯通电桥。通过使用这种测量技术,可以以高精度和再现性进行差分电阻测量。惠斯通电桥的功能是众所周知的,并且因此将不再详细解释。
20.由于磁阻元件并且尤其是其隔离金属氧化物屏障可实现在许多千欧姆或兆欧姆的范围中的高电阻,因此电阻的连续测量的电功耗通常很低,并且测量单元可由小型电池供电,或者至少应急电源可以很容易地由电池提供。
21.可以设想,在此提出的拉线传感器包括上述类型的又一旋转tmr传感器。在这种情况下,两个旋转tmr传感器可平行地耦合至卷轴、轴杆或轮轴,以便创建冗余测量系统。
22.在此提出的创新不限于如上所述的拉线传感器,还可涉及移动机器,尤其是包括如上所述的拉线传感器的车辆或起重机。在崎岖不平的应用中也必须可靠工作的机械可受益于使用基于隧道磁阻传感器来工作的拉线传感器。
附图说明
23.以下详细描述中描述了在此提出的拉线传感器和在此提出的移动机器的实施例,并且它们在附图中描绘。在附图中,
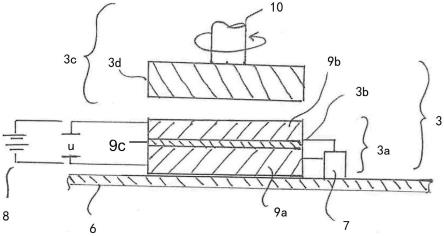
24.图1是示意性地示出磁阻传感器及其工作原理的示图,
25.图2是示意性地示出耦合至拉线卷绕其上的线轴的磁阻传感器的3d视图,
26.图3是示意性地示出pcb上带有传感器的外壳的示图,
27.图4是示意性地示出具有拉线传感器的潜在应用的车辆的示图,以及
28.图5是示意性地示出具有拉线传感器的潜在应用的车辆的另一视图。
具体实施方式
29.图1示意性地示出了磁阻传感器3的结构。传感器3包括固定部件或固定部分3a。这里,固定部件3a被固定到印刷电路板或pcb 6。固定部件3a包括磁阻元件3b,该磁阻元件3b包括基准元件9a、感测元件9b和设置在基准元件9a和感测元件9b之间的隔离屏障9c。隔离屏障9c的电阻严重依赖于基准元件9a和感测元件9b的磁场方向的对准。感测元件9b的磁场方向受外部可旋转磁体3d的磁场方向影响。因此,传感器3的电阻反映或指示可旋转磁体 3d的旋转角度。因此,可以通过测量传感器3的电阻来测量可旋转磁体3d的旋转角度。
30.如可在图2中所见,可旋转磁体3d被固定到轴杆10,该轴10耦合至卷轴、轴杆或轮轴2。在这里和下面的所有附图中,不同附图中示出的重复特征用相同的附图标记指定。拉线1缠绕在轴杆/轮轴2上,并且拉线1的任何延伸可以通过磁阻传感器3的电阻变化来测量。轴杆2借助于齿轮4与轴杆10机械耦合,齿轮4仅在图2中示意性地表示并且未详细示出。例如,齿轮4可以包括多个齿轮。
31.应理解,在这里未描绘的替代实施例中,旋转传感器3的一部分可直接安装或固定在轴杆或轮轴2上。例如,在这样的替换实施例中,磁体3d或磁阻元件3b中的任一者可被安装或固定在轴杆或轮轴2上。
32.返回到附图中描绘的实施例,提供了在轴杆2上保持扭矩的螺旋弹簧5。以此方式,螺旋弹簧5保持拉线1上的纵向张力。在图2中,可旋转磁体3d 在第一位置中以粗体显示,而在第二位置中以虚线显示,其中第二位置相对于第一位置绕轴杆10的旋转轴旋转几度。箭头11示出了在拉线1由螺旋弹簧5 延伸或拉回的情况下,拉线1的移动方向。
33.图3示出了具有印刷电路板6的拉线传感器的外壳12、拉线1缠绕或可能缠绕在其上的轴杆2、以及形成传感器的旋转部件3c的一部分的轴杆10。在图3中,传感器的旋转部件或旋转部分3c位于印刷电路板下方。固定部件 3a、测量单元7(见图1)以及被配置为执行电阻测量的可能其它电路系统被定位在印刷电路板6上。
34.拉线传感器还可包括用于为旋转传感器供电的电源。例如,电源可以包括电池8。
35.可任选地,拉线传感器可包括第二tmr传感器(未示出),该传感器机械耦合至或可机械耦合至轴杆2,以便创建冗余测量系统。
36.图4示出了带有可伸缩动臂(extendable boom)13的卡车15。双向箭头 14示出了拉线传感器可以在动臂延伸或缩回时测量线性移动的方向。
37.图5示出了卡车15的俯视图,该俯视图具有例如在卡车15的静止操作期间用于稳定卡车的可延伸支撑臂16、17、18、19。单个支撑臂可延伸一定距离,该距离可通过在此提出
类型的拉线传感器在由双箭头20、21、22、23指示的方向上测量。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1