车辆通过噪声测量系统的制作方法
1.本实用新型涉及车辆通过噪声测量的技术领域,尤其涉及一种车辆通过噪声测量系统。
背景技术:
2.为控制车辆噪声排放,车辆制造商必须按照国家标准或标准化组织的规定来测量车外通过噪声,以确保其车辆噪声排放在规定的范围内。为此,需要测量车辆通过测试场地的车外通过噪声,还需要测量在该过程中的诸如车速、发动机转速、车辆位置之类的车辆状态参数,这就存在两者测量数据的同步的问题。
3.一种现有的解决方案是采用rtk设备和gps时钟同步设备来同步两者测量数据,但rtk设备和gps时钟同步设备价格高昂,因此该解决方案存在成本过高的问题。另一种现有的解决方案借助于测速雷达和无线lan(局域网)来实现两者测量数据的同步,但无线lan技术的实时性较差,通常50ms才进行一次数据同步,这对于测量时长仅持续数秒的测量过程而言太慢,因此该解决方案存在因无法及时同步测量数据而导致的测量精度过低的问题。
技术实现要素:
4.鉴于现有技术中的上述问题,本实用新型旨在提供一种车辆通过噪声测量系统,其能够以低成本和高精度实现车辆通过噪声测试。
5.根据本实用新型的一实施方式,提供了一种车辆通过噪声测量系统,其包括:第一触发开关,设置于车辆外部且设置于测量轨道的测量始端线处,构造成在车辆进入测量始端线时生成第一触发信号;第二触发开关,设置于车辆外部并设置于测量轨道的测量终端线处,构造成在车辆离开测量终端线时生成第二触发信号;第三触发开关,设置于车辆上,用于在第一触发信号被生成同时生成第一时间触发信号,并在第二触发信号被生成同时生成第二时间触发信号;噪声采集设备,设置于车辆外部并设备于所述测量始端线与所述测量终端线之间,构造成采集车辆通过噪声;测速仪,设置于车辆上,用于测量车速;第一控制设备,设置于车辆外部,与第一触发开关、第二触发开关和噪声采集设备分别通信连接,构造成记录来自噪声采集设备的、在对应于接收到第一触发信号与第二触发信号之间的时间段内的车辆通过噪声数据;以及第二控制设备,设置于车辆上,与所述车辆的诊断接口、测速仪和第三触发开关分别通信连接,构造成记录来自诊断接口和来自测速仪的、对应于在接收到第一时间触发信号与第二时间触发信号之间的时间段内的车辆状态数据。
6.在一实施方式中,所述第一控制设备与所述第二控制设备通信连接,并通过网络时钟服务器进行时间同步。
7.在一实施方式中,所述噪声采集设备包括一对或多对噪声采集单元,每对噪声采集单元中各噪声采集单元对称地布置于所述测量轨道的两侧。
8.在一实施方式中,每对噪声采集单元中各噪声采集单元与所述测量轨道的中心线之间的距离是预先设定的并且能够调节;和/或每对噪声采集单元中各噪声采集单元与所
述测量轨道的表面之间的高度是预先设定的并且能够调节。
9.在一实施方式中,所述车辆状态数据包括所述车辆的发动机转速、发动机扭矩、油门开度、车速、纵向车辆加速度和变速箱档位中的至少一项。
10.在一实施方式中,所述车辆通过噪声数据包含所述车辆通过噪声的分贝值、尖锐度、波动度、粗糙度和烦恼度中的至少一项。
11.在一实施方式中,所述第一触发开关包括第一光电传感器,所述第二触发开关包括第二光电传感器,并且第三触发开关包括第三光电传感器。
12.在一实施方式中,第一控制设备包括:单片机,具有与第一触发开关通信连接的第一接口、与第二触发开关通信连接的第二接口和与噪声采集设备通信连接的第三接口;以及计算设备,与噪声采集设备和第二控制设备分别通信连接。
13.在一实施方式中,所述第一控制设备包括树莓派,并且第二控制设备包括树莓派。
14.在一实施方式中,所述车辆通过噪声测量系统还包括用于显示测量结果的显示设备,所述显示设备包括设置于车辆内的、能够显示所述车速的显示设备。
附图说明
15.从结合附图的以下详细说明中,将会使本实用新型的方案更加清楚。可以理解的是,这些附图仅用于说明的目的,而并非意在对本实用新型的保护范围进行限制。
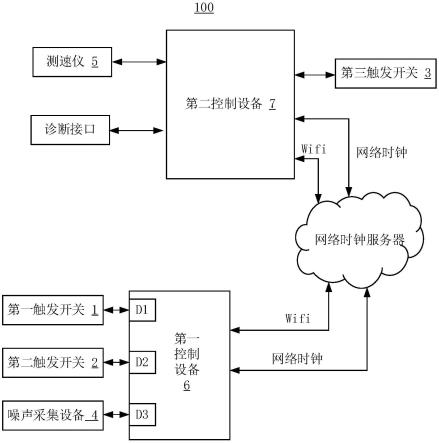
16.图1是根据本实用新型一实施方式的车辆通过噪声测量系统的示意性框图。
17.图2示出了图1中的车辆通过噪声测量系统的一实施例。
18.图3示意性示出了图1中的车辆通过噪声测量系统的工作原理。
具体实施方式
19.本实用新型的实施例涉及车辆通过噪声测量系统,其适用于根据相应标准规定的车辆通过噪声(车外噪声)的测量,还适用于用户定制化的车辆通过噪声的测量。根据本实用新型实施例的车辆通过噪声测量系统能够获得车辆通过噪声与车辆状态之间的准确映射关系,有助于分析车辆通过噪声的产生原因。
20.下面,结合附图描述本实用新型的实施方式。
21.图1示意性示出了根据本实用新型一实施方式的车辆通过噪声测量系统(以下简称为“测量系统”)100。该测量系统100包含两部分设备,一部分设置于车上,随车运动,用于采集车辆状态数据;另一部分设置于测量轨道上,用于采集车辆通过噪声。根据本实用新型实施例的技术方案,能够在整个测量过程中将车外的测量数据和车内的测量数据的同步在一起,从而不存在如现有方案那样因数据同步频率过慢而丢失大量测量数据的问题。
22.参见图1,测量设备100包括:第一触发开关1、第二触发开关2、第三触发开关3、噪声采集设备4、测速仪5、第一控制设备6和第二控制设备7。
23.第一触发开关1设置于车辆外部,并位于测量轨道上规定的测量始端线处。在车辆进入测量始端线时,第一触发开关1生成第一触发信号。在一实施例中,第一触发信号可以实现为上升沿触发或下降沿触发或电平触发。例如,在车辆没有进入测量始端线时,第一触发开关1的输出信号一直为低电平,在车辆进入测量始端线时,第一触发开关1的输出信号变为高电平。在该实施例中,也能够实现为:在车辆没有进入测量始端线时,第一触发开关1
的输出信号一直为高电平,在车辆进入测量始端线时,第一触发开关1的输出信号变为低电平。第一触发开关1可以实现为设置于距离轨道表面预定高度的光电传感器或铺设于轨道表面的压力传感器。
24.这里,“车辆进入测量始端线”可以以车头进入测量始端线为准,也可以以车尾进入测量始端线为准,还可以以车身的预定位置进入测量始端线为准。
25.第二触发开关2设置于测量轨道上规定的测量终端线处。在车辆离开测量终端线时,第二触发开关2生成第二触发信号。在一实施例中,第二触发信号可以实现为上升沿触发或下降沿触发或电平触发。例如,在车辆没有离开测量终线时,第二触发开关2的输出信号一直为低电平,在车辆离开测量终端线时,第二触发开关2的输出信号变为高电平。在该实施例中,也能够实现为:在车辆没有离开测量终端线时,第二触发开关2的输出信号一直为高电平,在车辆离开测量终端线时,第二触发开关2的输出信号变为低电平。第二触发开关2可以实现为设置于距离轨道表面预定高度的光电传感器或铺设于轨道表面的压力传感器。
26.这里,“车辆离开测量终端线”可以以车头离开测量终端线为准,也可以以车尾离开测量终端线为准,还可以以车身的预定位置离开测量终端线为准。在一实施例中,“车辆离开测量终端线”可以采用与“车辆进入测量始端线”相同的判断方式。
27.第三触发开关3设置于车辆上。第三触发开关3在第一触发开关1生成第一触发信号的同时生成第一时间触发信号(即,在车辆进入测量始端线的同时生成第一时间触发信号),并在第二触发开关2生成第二触发信号的同时生成第二时间触发信号(即,在车辆离开测量终端线的同时生成第二时间触发信号)。例如,第三触发开关3可以实现为设置于车门外侧面上的光电传感器。
28.类似地,第一时间触发信号和第二时间触发信号也可以通过上升沿触发或下降沿触发或电平触发来实现。
29.噪声采集设备4设置于车辆外部,并位于测量始端线与测量终端线之间,用于采集车辆通过测量轨道过程中的通过噪声。在一实施例中,噪声采集设备4包括一对或多对噪声采集单元。每对噪声采集单元中的各噪声采集单元对称地布置于测量轨道的两侧。在噪声采集设备4包括一对噪声采集单元的情况下,该对噪声采集单元布置于在测量始端线与测量终端线之间的中间线上(例如,参见图3,一对噪声采集单元41和42布置在测量始端线aa’与测量终端线bb’之间的中间线pp’上)。在噪声采集设备4包括多对噪声采集单元的情况下,该多对噪声采集单元等间距地布置于测量始端线与测量终端线之间(例如,多对噪声采集单元在测量始端线aa’与测量终端线bb’之间等间距地布置与测量轨道两侧)。
30.测速仪5设置在车辆上,随车运动,用于测量车速。在本实用新型实施例中,采用的是车辆行驶方向上的车速(纵向车速)。测速仪5可以实现为gps测速仪、雷达测速仪或激光测速仪。测速仪5可以通过车辆总线以有线的方式与第二控制设备7通信连接,也可以通过wifi或4g或5g以无线的方式与第二控制设备7通信连接,从而以有线和/或无线方式将测得的车速传输给第二控制设备7。可以理解的是,虽然测速仪5在物理位置上设置于车辆上,但为相对于车辆的外置测速设备。如此外置的测速仪5相对于车辆自身的测速传感器而言,能够以比车辆自身的测速传感器更高精度地测得车辆行驶速度,具有测量准确度高的优点。
31.第一控制设备6设置于车辆外部,具有与第一触发开关1通信连接的第一接口d1、
与第二触发开关2通信连接的第二接口d2和与噪声采集设备4通信连接的第三接口d3。第一控制设备6在接收来自第一触发开关1的第一触发信号同时控制噪声采集设备4开始采集车外噪声,并且在接收到来自第二触发开关2的第二触发信号同时控制噪声采集设备4结束采集车外噪声,从而获得车辆通过测量始端线与测量终端线过程中的车辆通过噪声数据。通过对该车辆通过噪声数据进行分析和处理,可以得到该通过噪声数据的分贝值、尖锐度、波动度、粗糙度和烦恼度中的一项或多项。
32.在一实施例中,第一控制设备6可以借助于树莓派来实现。采用树莓派的实现方式具有易于开发,易于扩展接口的优点。
33.在一实施例中,噪声采集设备4可以在车辆进入测量始端线之前开始采集噪声,并在车辆离开测量终端线之后继续采集噪声,第一控制设备6在接收到来自第一触发开关1的第一触发信号时和接收来自第二触发开关2的第二触发信号时分别记录时间戳,并截取在两次时间戳之间噪声数据,从而获得车辆通过测量始端线与测量终端线过程中的车辆通过噪声数据。换言之,在该实施例中,通过根据记录的时间戳来截取车辆通过测量始端线与测量终端线过程中的噪声数据。在车辆进入测量始端线之前测得的噪声和在车辆离开测量终端线之后测得的噪声可以作为背景噪声,在分析和处理噪声数据时使用。
34.第二控制设备7设置在车辆上,具有与车辆总线通信连接一个或多个接口以及与第三触发开关3通信连接的接口。第二控制设备7在接收到来自第三触发开关3的第一时间触发信号时记录第一时刻,并在接收到来自第三触发开关3的第二时间触发信号时记录第二时刻。第二控制设备7经由测速仪获得作为车辆状态参数的车速并经由车辆的诊断接口获得除车速以外的其他车辆状态参数,并且记录在第一时刻与第二时刻之间的时间段内的车辆状态参数,作为车辆状态数据。该车辆状态数据包括发动机转速、发动机扭矩、油门开度、纵向车速、纵向车辆加速度和变速箱档位中的一项或多项。车辆总线包括多种类型,例如,控制器区域网络(can总线)、局域互联网络(lin总线)、flexray网络(flexray consortium)和以太网(ethernet)中的一项或多项。在一实施例中,第二控制设备7可以借助于树莓派来实现。
35.第一控制设备6与第二控制设备7无线通信连接,(例如,通过wifi或蓝牙),以将车内和车外的测量数据合并起来。测量数据可以合并于第一控制设备6中并在第一控制设备6中进行数据分析和处理。替代地或附加地,可以合并于第二控制设备7中并在第二控制设备7中进行数据分析和处理。而且,网络时钟服务器将其时钟同步到第一控制设备6和第二控制设备7。网络时钟服务器从gps卫星获得标准的时间信号,因此采用网络时钟服务器,实现了整个系统的标准时间同步。
36.在一实施例中,测量系统100还包括显示设备(未示出),与第一控制设备6和/或第二控制设备7通信连接,用于显示测量结果。该测量结果在显示设备上以文字、图形和表格中的至少一种方式来呈现。该显示设备可以包括设置于车辆内供车辆驾驶员查看测量结果的显示设备。例如,车内显示设备能够显示驾驶员需要时刻关注的车速。该显示设备还可以包括设置于车辆外部供测量系统100的操作者查看测量结果的显示设备。
37.图2示出了图1中的测量系统100的一实施例。
38.在图2的实施例中,第一触发开关1实现为第一光电传感器,设置于车外并位于测量始终端线的一侧。在测量始端线的另一侧布置有第一反光板。第一光电传感器基于由第
一光电传感器发射的光信号被反射的光信号,生成第一触发信号。例如,在车辆进入测量始端线之前,第一光电传感器发射的光被第一反光板反射,在车辆进入测量始端线时,第一光电传感器发射的光被车辆遮挡,由此第一光电传感器的输出信号产生变化,从而生成第一触发信号。在此描述的第一光电传感器包括光发射器(例如,发光二极管(led)、激光等光源)和用于光信号转换为电信号的光电探测器(例如,光电二极管)。此外,文中出现的第二光电传感器和第三光电传感器也具有相同或类似的构造,下文不再赘述。
39.类似地,第二触发开关2实现为第二光电传感器,设置于车外并位于测量终端线的一侧。在测量终端线的另一侧布置有第二反光板。在车辆未离开测量终端线之前,第二光电传感器发射的光(例如,led或激光)被第二反光板反射,在车辆离开测量终端线时,第二光电传感器发射的光被车辆遮挡,由此第二光电传感器的输出信号发生变化,从而生成第二触发信号。
40.第三触发开关3实现为第三光电传感器,设置于车上,例如设置于车身外侧。在地面上的测量始端线处布置有第一地面反光带,并且在地面上的测量终端线处布置有第二地面反光带。在车辆进入测量始端线之前,第三光电传感器发射的光(例如,led或激光)被地面反射,在车辆进入测量始端线时,第三光电传感器发射的光被第一地面反光带反射。第三光电传感器发射的光被地面反射和被反光带反射的输出信号不同,由此生成第一时间触发信号。在车辆离开测量终端线之前,第三光电传感器发射的光(例如,led或激光)被地面反射,在车辆离开测量终端线时,第三光电传感器发射的光被第二地面反光带反射。第三光电传感器发射的光被地面反射和被地面反光带反射的输出信号不同,由此生成第二时间触发信号。
41.第一控制设备6包括单片机61和计算设备62。单片机61可以采用多种型号的单片机来实现,满足本实用新型实施例的需求即可。计算设备62可以采用具备计算能力的多种计算设备,例如,笔记本计算机,台式机,平板。单片机61具有与第一触发开关1通信连接的第一接口d1、与第二触发开关2通信连接的第二接口d2和与噪声采集设备4通信连接的第三接口d3。单片机61在接收到来自第一触发开关1的第一触发信号时,生成用于触发噪声采集设备4开始采集噪声的输出信号。单片机61采用中断处理来生成该输出信号,以便确保实时性。类似地,单片机61在接收到来自第二触发开关2的第二触发信号时,生成用于触发噪声采集设备4结束采集噪声的输出信号。单片机61采用中断处理来生成该输出信号,以便确保实时性。噪声采集设备4将采集的噪声信号传输给计算设备62,以便在计算设备62中进行数据分析和处理。
42.在一实施例中,与上述描述类似地,噪声采集设备4可以在第一触发开关1被触发之前开始采集噪声,并在第二触发开关2被触发之后继续采集噪声。单片机61通过记录与接收到第一触发信号和接收第二触发信号分别相应的时间戳,从而获取在接收到第一触发信号与接收第二触发信号的时间段内的噪声信号。
43.第二控制设备7包括树莓派72和与树莓派72连接的接口扩展板71。接口扩展板71包括与车辆总线连接的一个或多个接口,分别经由车辆总线与测速仪5和车辆的诊断端口通信连接。一个或多个接口例如包括与can总线连接的多个can总线接口(can1、can2),以便经由车辆总线获得车辆状态数据。车辆诊断端口例如是obd2端口,即,ⅱ型车载诊断系统的端口。树莓派72具有与第二显示设备9通信连接的视频接口(例如,hdmi)和与第三触发开关
3通信连接的接口(例如,gpio:通用输入输出)
44.第一显示设备8与计算设备72通信连接。第一显示设备8设置于车辆之外,例如供测量系统100的用户(操作者)查看测量结果。
45.第二显示设备9与树莓派72通信连接。第二显示设备9设置于车内,例如,实现为车辆的中控屏,供车辆驾驶员查看测量结果,尤其是驾驶员需要时刻关注的车速。
46.由此可见,根据本实用新型的实施例,采用车上的触发开关与车外的触发开关相配合,使用网络时钟同步,能够大幅度降低成本,还能够将整个测量过程中的测量数据同步到一起,提高了测量精度,降低了成本。在得到高精度测量结果的基础上,有利于研究车外噪声与车速、发动机转速等车辆状态之间的关系,从而能够分析车外噪声的产生原因。
47.图3示出了布置在测量轨道的测量系统100的实施例。下面,参照图3来描述测量系统100的工作原理,并验证采用该测量系统100测量车辆通过噪声的效果。
48.车辆进入测量始端线aa’时
49.当车辆进入测量始端线aa’时,设置于车外的第一触发开关1和设置于车上的第三触发开关3同时被触发。这时,第一控制设备6控制控制噪声采集设备4的一对噪声采集单元41和42开始采集车外噪声。同时,第二控制设备7记录第一时刻,并开始采集车辆状态参数(例如,车速、发动机转速和油门踏板位置)。
50.车辆离开测量终端线bb’时
51.当车辆离开测量终端线bb’时,设置于车外的第二触发开关2和设置于车上的第三触发开关3同时被触发。这时,第一控制设备6控制控制噪声采集设备4的一对噪声采集单元41和42停止采集车外噪声。同时,第二控制设备7记录第二时刻,并停止采集车辆状态参数(例如,车速、发动机转速和油门踏板位置)。
52.在测量始端线aa’与测量终端线bb’之间
53.噪声采集设备4的一对噪声采集单元41和42持续采集车外噪声。第二控制设备7持续记录数据以及各数据的时间戳。
54.通过pp’时
55.在一实施例中,在pp’位置处设置反光板和地面反光带。这样,能够关注到车辆通过pp’时的车速和噪声等数据。可以理解的是,通过pp’位置时的数据,也能够通过计算得到。在pp’位置处增设反光板和地面反光带是为了增加准确度,并起到与计算结果交叉验证的作用。
56.车内测量数据和车外测量数据的整合
57.由于车内测量设备和车外测量设备被同时触发,根据测量开始时刻和测量结束时刻,截取从aa’到bb’的噪声数据,得到下表1中的数据;并截取从aa’到bb’的车辆状态数据,得到下表2中的数据。将表1和表2中的数据按照时间排序,得到表3中的数据。由于间隔时间极短,车辆通过过程可视为匀加速或匀减速,从而补齐空白处的数据。将速度和时间积分,可得出车辆在每个时刻与aa’之间的距离(aa’位置的距离为0),从而得到下表4中的数据。
[0058][0059]
表3
[0060]
时间(ms)噪声(db)发动机转速(rpm)车速(km/h)油门踏板(%)056.0200048.01001056.0
ꢀꢀꢀ
11 200249.01002057.0
ꢀꢀꢀ
23 200450.010029 200651.01003058.0
ꢀꢀꢀ
4059.0
ꢀꢀꢀ
41 200852.01005060.0
ꢀꢀꢀ
53 201053.0100
[0061]
表4
[0062]
时间(ms)噪声(db)发动机转速(rpm)车速(km/h)油门踏板(%)距离(m)056.0200048.01000.01056.0200248.91000.1333333331156.1200249.01000.1469191922057.0200449.81000.2694191922357.3200450.01000.3108775252957.9200651.01000.3942108593058.0200651.01000.4083775254059.0200851.91000.5500441924159.1200852.01000.5644608595060.0244963.41000.694460859
[0063]
经过多次测量,以车速50km/h计算,车内车外数据时间戳的误差在3ms以内,距离误差在4cm以内。
[0064]
本实用新型的主旨是对车辆通过噪声测量系统的硬件的改进,测量系统的软件基本上可以使用现有的软件(当然不排除针对硬件改进需要对软件做出适应性修改)。
[0065]
虽然前面描述了一些实施方式,这些实施方式仅以示例的方式给出,而不意于限制本实用新型的范围。所附的权利要求及其等同替换意在涵盖本实用新型范围和主旨内做出的所有修改、替代和改变。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1