一种仿真力矩传感系统的制作方法
1.本实用新型涉及力矩传感器,尤其是涉及一种仿真力矩传感系统及其力矩采集方法。
背景技术:
2.随着社会经济的发展以及广大人民生活水平的提高,机动载具的数量逐年增加,非机动载具逐步被替代,区别与因非机动载具偏向低速行驶,所以在替代过程中以助力机动载具的形式呈现,助力机动载具的核心动力源为助力电机,而提高助力电机其所提供的助力是否平稳,响应是否及时、有效,如何提升助力电机性能与前端力矩采集密不可分。常规力矩传感器数据采集手段单一,采集的数据不具备线性,呈断崖式峰值、峰谷数值无法控制电机有效平稳的输出,限制了载具的安全性,也降低了驾驶、乘坐的体验感。
技术实现要素:
3.为了解决背景技术中存在的问题,本实用新型提供一种仿真力矩传感系统。
4.本实用新型采用如下的技术方案:一种仿真力矩传感系统包括:传动座、摆杆、信号发生器、信号接收器、微处理器的电控单元;所述传动座与摆杆相连,摆杆一端设有信号发生器,信号发生器水平方向设有信号接收器,信号接收器将接收到的信号频率和强弱信息通讯给微处理器的电控单元。传动座与非机动载具的飞轮相连接,飞轮在受到外力驱使带动传动座转动,传动座与摆杆一端相连接,随着传动座转动带动摆杆进行杠杆运动,使设置在摆杆另一端上的信号发生器无限趋近水平方向相对静止设置的信号接收器,通过改变两者间的距离来改变信号的强弱,以此模拟当前传动座的受力大小。同时由于信号发生器随着传动轮转动,经过相对静止设置的信号接收器的频率即可得出当前的相对速度。
5.进一步,所述传动座与摆杆之间设有弹性体,所述弹性体与传动座相互抵接,弹性体随着传动座转动受到挤压变形同时施放斥力限制传动座的挤压,使得当前传动座受力越大,摆杆上的信号发生器越接近信号接收器,一旦减小受力能即刻反弹拉两者开接收距离,使传感范围的尾端量程的模拟信号更细腻,更符合仿真人工力学。
6.进一步,所述摆杆设有活动支点、受力臂和阻力臂,受力臂随传动座转动受力。通过改变活动支点在摆杆上的位置,来调整受力臂和阻力臂的长短比例,进一步控制力矩变化。
7.进一步,所述信号发生器与信号接收器相对水平方向设置,信号接收器呈环状静止分布在摆杆旋转所经范围的外围。按1~12点钟位置设置静止的12个信号接收器,覆盖360
°
,当信号发生器依次经过各个信号接收器,(1~12个信号接收器依次收到1次信号)即表示旋转一周。旋转过程中,信号发生器与各个信号接收器间的相对距离变化,反应当前传动座所受力变化,越接近表示压力越大,压力越大表示当前所需输出功率越高。
8.进一步,错位设置多个所述信号发生器可实现差分计算力矩。错位设置多个信号发生器,在传动轴旋转一周的同时可获得多组数据,例如正/负15
°
设置2个信号发生器,在
旋转一周后可由原来的12个信号增加至24个信号,依次类推,通过设置多个信号发生器并采用差分计算能进一步提高采样精度,实现在有限空间内增强信号精度的效果。
9.一种仿真力矩传感系统的力矩采集方法,通过以下步骤来实现:
10.步骤1:在待测电机的传动轴上安装仿真力矩传感系统。包括在传动轴上设置传动座,传动座与非机动载具的飞轮联动,传动座通过弹性材料与摆杆一端抵接,摆杆另一端设置信号发生器,在信号发生器水平位置环状设置信号接收器,环状设置的信号接收器与电机定子固定,保证在转动时静止,信号接收器与微处理器的电控单元相连接;
11.步骤2:飞轮带动传动座,获得当前传动轴转动压力信息。传动座受飞轮带动,受到弹性体的限制推动摆杆受力臂,摆杆通过杠杆运动抬动阻力臂一端上的信号发生器,改变信号发生器与信号接收器之间的距离,通过距离远近模拟当前传动轴转动压力情况,压力越大表示当前所需输出功率越高,。
12.步骤3:飞轮带动传动座转动,获得当前传动轴转速信息。传动座通过摆杆带动摆杆上的信号发生器轴方向旋转,通过相对静止环状设置的信号接收器接收信号发生器经过时的信号,捕获当前传动轴的转速信息
13.步骤4:微处理器的电控单元接收步骤2、3所获信息,模拟当前状态,计算力矩值控制电机调整输出功率。电机转速越高,同一单位时间内,信号发生器经过的信号接收器越多,采集的信号越多,所生成的数据越线性。
14.本实用新型提供一种仿真力矩传感系统及其力矩信息采集方法,所述力矩传感系统通过所述传动座受外力产生转矩,所述产生的转矩作用在摆杆上,采用摆杆摆动来改变信号发生器、信号接收器的传感距离,根据距离的变化来模拟当前的力矩变化,在传动座与摆杆之间增加了弹性介质有效延展了采样区间,模拟真实性,达到仿真的目的。同时在信号采集端采用多点错位设置采集,利用差分计算的方式提高采样数据的精度。为后续驱动电机提供了数据保障,提高电机驱动载具的安全性,舒适性。
附图说明
15.图1为本实用新型示意图;
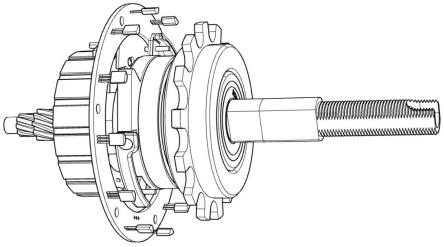
16.图2为本实用新型部件爆炸示意图;
17.图3为本实用新型传动座与弹性体的位置示意图;
18.图4为本实用新型带电机定子示意图;
19.图5为本实用新型没有弹性体下的信号采集曲线图;
20.图6为本实用新型增加弹性体下的信号采集曲线图;
21.图7为本实用新型增加弹性体且高转速下的信号采集曲线图。
22.图中所标注的序号依次表示为:1-飞轮;2-传动座;3-摆杆;4-信号发生器;5-信号接收器;6-微处理器的电控单元;7-弹性体;8-电机转子;9电机定子。
具体实施方式
23.下面结合附图1-4和具体实施方式对本实用新型作进一步详细说明。
24.以电机为例,在待测电机的传动轴上安装仿真力矩传感系统。包括在传动轴上设置传动座2,传动座2与非机动载具的飞轮1联动,传动座2通过弹性体7与摆杆3一端抵接,摆
杆3另一端设置信号发生器4,在信号发生器4水平位置环状设置信号接收器5,环状设置的信号接收器5与电机定子9固定,保证在转动时静止,信号接收器5与微处理器的电控单元6相连接;
25.飞轮1带动传动座2,获得当前传动轴转动压力信息。传动座2受飞轮1带动,受到弹性体7的限制推动摆杆3受力臂,摆杆3通过杠杆运动抬动阻力臂一端上的信号发生器4,改变信号发生器4与信号接收器5之间的距离,通过距离远近模拟当前传动轴转动压力情况,压力越大表示当前所需输出功率越高,。
26.飞轮1带动传动座2转动,获得当前传动轴转速信息。传动座2通过摆杆3带动摆杆3上的信号发生器4轴方向旋转,通过相对静止环状设置的信号接收器5接收信号发生器4经过时的信号,捕获当前传动轴的转速信息
27.微处理器的电控单元6接收步骤2、3所获信息,模拟当前状态,计算力矩值控制电机调整输出功率。电机转速越高,同一单位时间内,信号发生器经过的信号接收器越多,采集的信号越多,所生成的数据越线性。
28.通过图5-7可知不同条件下传感器采样的情况,假设传感器取值电压为0~5v,当前转速为圈数/秒,在没有弹性体7的缓冲下,单凭摆杆3的摆动所采集到的信号斜率陡,接近开关信号;在有弹性体7缓冲下所采集的信号斜率明显小于没有弹性体7的斜率,可保障系统的线性平缓的输出;当前转速越高所得到的斜率越小,输出越线性。
29.上述具体实施方式用来解释说明本实用新型,仅为本实用新型的优选实施例而已,而不是对本实用新型进行限制,在本实用新型的精神和权利要求的保护范围内,对本实用新型作出的任何修改、等同替换、改进等,都落入本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1