一种用于声光联动监测定位的空气声呐阵列装置的制作方法
1.本技术属于声学与信号处理领域,涉及通讯原理,信号检测,被动声源定位,模拟电路等理论。
背景技术:
2.空气声呐,是一种利用声波在空气中的传播特性,通过电声转换和信息处理,完成空气中目标探测与通讯的电子设备。空气声呐一般由若干个声传感器按照一定的几何排布规则组成,被动的接收声音信号,属于被动工作方式,空气声呐可以对多接收的声音信号进行检测感知与定位。
3.现有技术中视频监控系统主要由摄像、传输、控制,3大部分组成。摄像机通常分为枪型摄像机与球形摄像机,其中球形摄像机通过可以通过协议指令,实现对相机云台的上、下、左、右的动作进行控制及对摄像机镜头进行调焦变倍的操作,以实现对视频监控区域0度至360度监控区域的全方位监控。现有的球形摄像机视频监控系统主要有两种工作模式,一种是预设位工作模式,即提前设置好不同时刻球形摄像机的旋转方位进行自动旋转,一种是手动工作模式,即工作人员根据监控需求在后端实现对球型摄像机旋转方位的调整。目前无论是哪种工作模式,都属于被动工作模式,仅能对区域光学信号进行检测,对监测区域的声音信号不会进行检测与定位。
技术实现要素:
4.为了克服现有技术的不足,本发明提供一种用于声光联动监测定位的空气声呐阵列装置。
5.本发明解决其技术问题所采用的技术方案是:一种用于声光联动监测定位的空气声呐阵列装置,由声呐舱体和下盖板组成;所述声呐舱体内部设置声传感器、采集单元、信号处理单元;所述声呐舱体侧壁设置多个通孔,多个通孔组成通孔阵列;通孔内安装微型麦克风孔;所述声呐舱体顶壁中心外部设置内螺纹连接器;所述声呐舱体顶部设置四个螺丝孔位;所述下盖板边缘处设置8个固定螺丝。
6.所述声呐舱体为环形。
7.所述声传感器,声传感器数目设置为4的倍数。
8.所述声呐舱体侧壁通孔阵列,使用环形设计。
9.所述声呐舱体侧壁设置通孔阵列采用200mm孔径。
10.所述微型麦克风孔贴有防水透声膜。
11.本发明的有益效果是:将空气声呐阵列安装在可以旋转的光学监测设备旁边后,空气声呐装置可以实现对环境声音信号的采集、检测与定位,当检测到用户所设定的异常声音信号后,可以对声音信号进行被动声源定位,同时通过开放式网络视频接口论坛协议控制光学监测设备旋转至声源方向,进行图像取证。该装置实现了声音检测、声源定位技术与光学监测手段的融合,实现对环境中异常声音信号的秒级响应检测与定位,弥补传统光
学监测设备缺乏声音维度感知能力的问题。该装置可广泛应用于智慧安防,警用机器人,边界封控等安防场景,该装置对于进一步提升360度全向光学监测能力,提升光学监测秒级响应能力,丰富安防监测感知信息流维度具有重大意义
附图说明
12.图1多通道环形阵空气声呐仰视图
13.图2多通道环形阵空气声呐侧视图
14.图3多通道环形阵空气声呐俯视图
15.图4总体工作流程框图
16.图5空气声呐阵列装置安装网络架构图
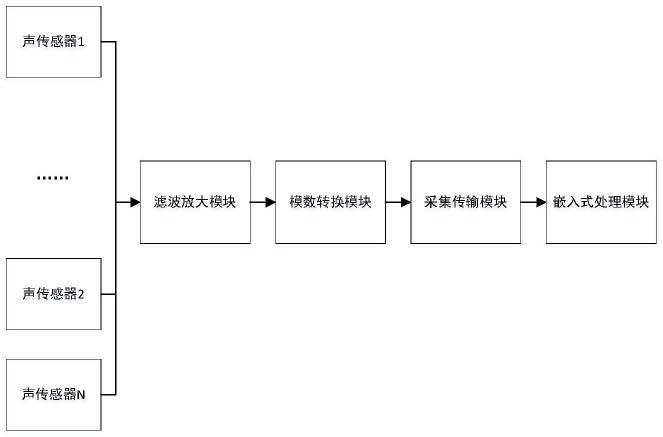
17.图6设备内部模块连接图
18.图1中1为多通道环形阵声呐下盖板;
19.图1中2为声呐下盖板的固定螺丝,共8个,起到固定下盖板作用;
20.图2中3为水密接头,安装于声呐环形舱体顶壁中心,作为设备网线与电源线出线端口;
21.图2中4为微型麦克风孔,贴有防水透声膜,用来采集环境中产生的噪声信号;
22.图2中5为声呐舱体侧壁的通孔阵列,构成声呐阵列;
23.图3中6为固定螺丝孔位,用来安装固定整个声呐;
24.图3中7为声呐环形舱体,内部固定有声传感器,采集单元、信号处理单元;
25.图3中8为声呐环形舱体顶壁中心外部设置内螺纹连接器,用于安装水密接头;
具体实施方式
26.本发明提出一种用于声光联动监测定位的空气声呐阵列装置,可以广泛应用于智慧安防,警用机器人,边界封控等安防场景。
27.本发明采用的技术方案是:一种用于声光联动监测定位的空气声呐阵列装置,由声呐舱体和下盖板组成;所述声呐舱体内部设置声传感器、采集单元、信号处理单元;所述声呐舱体侧壁设置多个通孔,多个通孔组成通孔阵列;通孔内安装微型麦克风孔,用来采集环境中产生的噪声信号;所述声呐舱体顶壁中心外部设置内螺纹连接器,用于安装水密接头,作为设备网线与电源线出线端口;所述声呐舱体顶部设置四个螺丝孔位,用来安装固定整个声呐;所述下盖板边缘处设置8个固定螺丝,起到固定下盖板作用。
28.所述声呐舱体为环形。
29.所述声传感器,声传感器数目设置为4的倍数。
30.所述声呐舱体侧壁的通孔阵列,采用环形阵设计。
31.所述声呐环形舱体侧壁设置通孔阵列采用200mm孔径。
32.所述微型麦克风孔贴有防水透声膜。
33.本发明装置的总体结构如附图所示。
34.图1中1为多通道环形阵声呐下盖板;
35.图1中2声呐下盖板的固定螺丝,共8个,起到固定下盖板作用;
36.图2中3为水密接头,安装于声呐环形舱体顶壁中心,作为设备网线与电源线出线
端口;
37.图2中4为微型麦克风孔,贴有防水透声膜,用来采集环境中产生的噪声信号;
38.图2中5为声呐舱体侧壁的通孔阵列,构成声呐阵列;
39.图3中6为固定螺丝孔位,用来安装固定整个声呐;
40.图3中7为声呐环形舱体,内部固定有声传感器,采集单元、信号处理单元;
41.图3中8为声呐环形舱体顶壁中心外部设置内螺纹连接器,用于安装水密接头;
42.本装置的总体工作流程框图如图4所示。
43.本装置的安装网络架构图如图5所示。
44.本装置设备内部模块连接如图6所示。
45.空气声呐具有多通道声传感器,实际传感器数目可以选择4的倍数,阵列采用环形阵设计,200mm阵列孔径,工作时需要根据光学监测设备的安装位置来确定声呐阵列的安装方式,具体实施步骤如下:
46.1、声呐布置
47.在现有的可旋转光学监测设备附近安装结构支架来安装空气声呐装置,安装孔为m6的螺丝。安装过程中需要尽可能保证声呐装置竖直方向的坐标轴尽可能与摄像机竖直方向坐标轴平行,以降低后期的校准误差。
48.2、方向校准
49.调整旋转声呐与光学监测设备的位置,分别将声呐装置平面极角的0度、90度、180度、270度、方向与可旋转的光学监测设备的0度、90度、180度、270度的方向进行校准。
50.3、物理网络接入
51.分别将空气声呐设备与光学监测设备的输出网线接入同一个局域网络内部,并配置设备的ip在同一网络字段。
52.4、网络视频接口论坛协议接入
53.在空气声呐的配置页面输入光学监测设备的网络视频接口论坛协议用户名与密码,实现网络视频接口论坛协议接入。
54.5、声音门限校准
55.采集10秒长度的环境声音信号,计算声音能量门限,修改空气声呐内部检测门限阈值以完成声音门限校准。
56.6、检测异常声音
57.声呐系统开始工作之后,系统会不断开始采集长度1秒的声音信号,并在设备前端实现对环境声音信号的实时处理与分析,一旦检测到信号异常则会实时预警。
58.7、光学设备联动
59.声呐前端处理器在监测到异常声音后,会立即计算出异常声音的声源位置后,经过适当变换,将位置坐标转换为经过校准后的球机的角度坐标。通过网络视频接口论坛协议,声呐控制光学监测设备转动向指定的角度坐标,进一步查看。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1