一种微液滴空中姿态实时捕捉装置的制作方法
本技术涉及一种微液滴空中姿态实时捕捉装置。
背景技术:
1、在微滴喷射3d打印成型过程中,采用点滴按需喷射方式成型,产品表面质量受到液滴形态、液滴轨迹、液滴速度等多方面影响,对液滴空中姿态的捕捉与分析需求日益增加。目前在微滴喷射3d打印成型过程中,对微液滴成型材料空中形态捕捉多采用镜头自动对焦或手动对焦方式对焦,当捕捉透明溶剂液滴时,常出现液滴与背景边界不清晰,从而导致后续分析工作无法准确有效进行,相机快门控制采用高速相机电子快门实现感光元件快速开关,采集多张图像后筛选清晰可用图像,用于后续处理,该方式对相机响应速度、电子快门速度提出较高要求,且在图像筛选过程算法复杂,筛选出图像只能表示过去时段液滴形态,无法实时反应当前液滴姿态,因此难以作为可靠的参考依据,是微液滴观测的中存在的主要问题。
技术实现思路
1、为了解决现有的微液滴空中姿态捕捉方案对相机性能需求高,采集结果不具备实时性的技术问题,本实用新型提供了一种微液滴空中姿态实时捕捉及分析装置。
2、本实用新型的技术方案是:
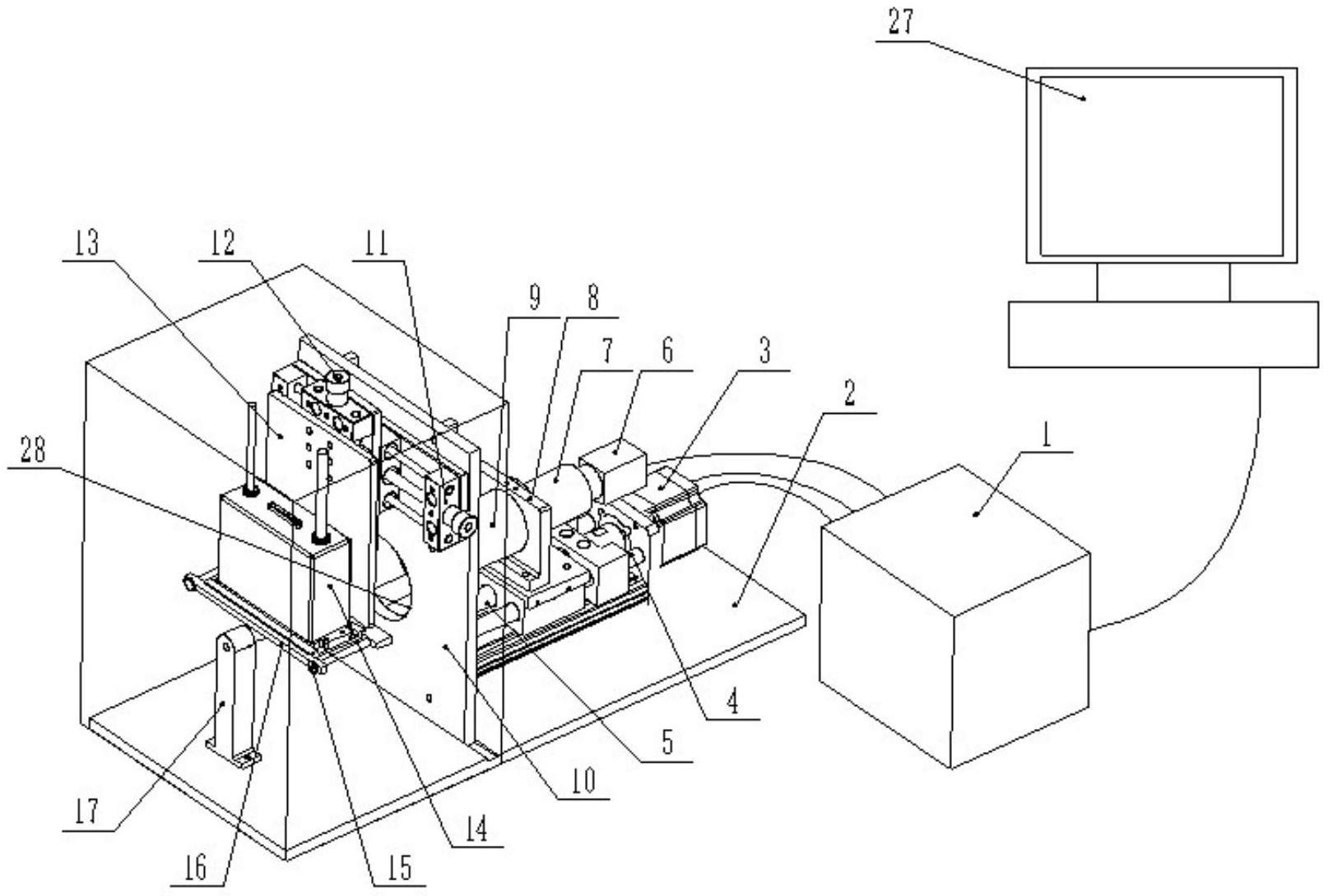
3、一种微液滴空中姿态实时捕捉装置,所述微液滴由微液滴发生器产生;其特殊之处在于:包括装置驱动控制系统、机械运动结构和成像系统;
4、装置驱动控制系统用于控制所述机械运动结构、成像系统、微液滴发生器运动及进行液滴图像采集;
5、机械运动结构用于实现微液滴发生器和成像系统的安装固定,以及微液滴发生器和成像系统位置调节;
6、成像系统安装在所述机械运动结构上方,包括微液滴捕捉光源、图像采集单元和至少一个光学成像镜头;微液滴捕捉光源用于模拟图像采集单元触发所需光源;图像采集单元用于实现图像采集;光学成像镜头用于对图像进行缩放。
7、进一步地,所述机械运动结构包括安装基板、对焦电机、导向机构、传动机构、运动平台、立板、水平微调机构、竖直微调机构、微液滴生成器夹持机构和遮光罩;
8、对焦电机设置在安装基板上方,用于调节成像系统与被观测的微液滴之间的物距以实现清晰成像;
9、导向机构沿电机轴方向设置在安装基板上方与安装基板机械连接,用于约束所述运动平台的自由度,使其仅具备沿导向机构轴线运动的单一自由度;
10、传动机构与对焦电机刚性连接,用于推动所述运动平台;
11、立板设置在安装基板上方并且位于导向机构一侧,在立板中部设有观测孔洞,所述成像系统通过该观测孔洞观测目标形态;
12、水平微调机构设置在立板上,竖直微调机构设置在水平微调机构上,微液滴夹持架构设置在竖直微调机构上,三者共同实现微液滴生成器的位置调节;
13、遮光罩用于隔绝外部环境光以满足成像系统所需暗室要求。
14、进一步地,所述成像系统包括图像采集单元、第一光学成像镜头、第二光学成像镜头和微液滴捕捉光源;
15、图像采集单元设置在运动平台上并与所述观测孔洞同轴,用于将采集的图像转换为所述装置驱动控制系统可识别处理的信息格式;
16、第二光学成像镜头用于光学缩放微液滴成像尺寸;
17、第一光学成像镜头用于二次缩放图像尺寸,调节光学图像投影至图像采集单元的成像距离;
18、微液滴捕捉光源设置在安装基板上方且与所述观测孔洞同轴,用于模拟图像采集单元触发所需光源。
19、进一步地,所述安装基板下方安装有地脚或阻尼隔振固定器。
20、进一步地,所述机械运动结构还包括锁紧装置,用于锁紧所述微液滴发生器。
21、进一步地,所述锁紧装置为具有外螺纹结构的长杆结构;
22、所述微液滴生成器夹持机构底端两侧设有螺纹安装孔,锁紧装置与该螺纹安装孔配合连接,通过旋转实现锁放。
23、进一步地,所述装置驱动控制系统包括装置驱动控制器和计算机;装置驱动控制器与机械运动结构、成像系统以及微液滴发生器电性连接;计算机与装置驱动控制器电性连接,并通过装置驱动控制器控制机械运动结构、成像系统、微液滴发生器运动及进行液滴图像采集。
24、一种微液滴空中姿态实时捕捉及分析装置,其特征在于:包括图像处理单元和上述的微液滴空中姿态实时捕捉装置;所述图像处理单元用于对微液滴空中姿态实时捕捉装置所捕捉到的微液滴图像进行处理,获取微液滴的飞行轨迹,预测出液滴落点。
25、与现有技术相比,本实用新型具有如下有益效果:
26、1.本实用新型通过对微液滴捕捉光源的微秒级精确控制,实现了普通相机即可完成液滴形态捕捉的功能,降低了对相机性能的要求。
27、2.本实用新型可实时观察微液滴姿态,通过滞后时间误差小于1微秒的精确控制,实现单一微液滴控制定位捕捉观测。
28、3.本实用新型通过微液滴捕捉光源滞后时间动态连续调节,可获取多时段液滴图像,基于获取的多时段液滴图像,采用现有方法对图像像素计算便能够获取液滴直径、体积、飞行轨迹曲线、飞行速度变化曲线等参数,实现实现微液滴尺寸在线测量,姿态实时捕捉。
29、4.本实用新型的捕捉装置获取的实时微液滴图像是通过对微液滴捕捉光源微秒级精确调控得到的,具有直观的位移与时间之间的联系,因而基于本实用新型捕捉到的微液滴图像进行微液滴飞行轨迹获取,可简化所需的滞后补偿算法,提高运算效率,从而有效提高对液滴速度、加速度、运动轨迹等相关运动学参数计算精度。
技术特征:
1.一种微液滴空中姿态实时捕捉装置,所述微液滴由微液滴发生器产生;其特征在于:包括装置驱动控制系统、机械运动结构和成像系统;
2.根据权利要求1所述的微液滴空中姿态实时捕捉装置,其特征在于:所述机械运动结构包括安装基板、对焦电机、导向机构、传动机构、运动平台、立板、水平微调机构、竖直微调机构、微液滴生成器夹持机构和遮光罩;
3.根据权利要求2所述的微液滴空中姿态实时捕捉装置,其特征在于:所述成像系统包括图像采集单元、第一光学成像镜头、第二光学成像镜头和微液滴捕捉光源;
4.根据权利要求2-3任一所述的微液滴空中姿态实时捕捉装置,其特征在于:所述安装基板下方安装有地脚或阻尼隔振固定器。
5.根据权利要求4所述的微液滴空中姿态实时捕捉装置,其特征在于:所述机械运动结构还包括锁紧装置,用于锁紧所述微液滴发生器。
6.根据权利要求5所述的微液滴空中姿态实时捕捉装置,其特征在于:所述锁紧装置为具有外螺纹结构的长杆结构;
7.根据权利要求6所述的微液滴空中姿态实时捕捉装置,其特征在于:所述装置驱动控制系统包括装置驱动控制器和计算机;装置驱动控制器与机械运动结构、成像系统以及微液滴发生器电性连接;计算机与装置驱动控制器电性连接,并通过装置驱动控制器控制机械运动结构、成像系统、微液滴发生器运动及进行液滴图像采集。
技术总结
为解决现有微液滴空中姿态捕捉方案对相机性能需求高,采集结果不具备实时性的问题,本技术提供了一种微液滴空中姿态实时捕捉及分析装置。实时捕捉装置包括装置驱动控制系统、机械运动结构和成像系统;装置驱动控制系统用于控制机械运动结构、成像系统、微液滴发生器运动;机械运动结构用于实现微液滴发生器和成像系统的安装固定,以及微液滴发生器和成像系统位置调节;成像系统包括微液滴捕捉光源、图像采集单元和至少一个光学成像镜头;微液滴捕捉光源用于模拟图像采集单元触发所需光源;图像采集单元用于实现图像采集;光学成像镜头用于对图像进行缩放。通过对微液滴捕捉光源的微秒级精确控制,实现了普通相机即可完成液滴形态捕捉的功能。
技术研发人员:朱晨辉,赵云贵,李超,尹恩怀,刘秀利,苑博,袁学礼,卓龙超
受保护的技术使用者:西安瑞特三维科技有限公司
技术研发日:20220516
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!