应用于半航空瞬变电磁探测的接收系统装置的制作方法
1.本实用新型涉及无人机瞬变电磁探测技术领域,特别是应用于半航空瞬变电磁探测的接收系统装置。
背景技术:
2.半航空瞬变电磁法是90年代提出的一种新的勘探方法,它采用地面发射、空中接收的工作模式,这种探测模式既充分发挥了地面瞬变电磁法的大功率发射的优势,又承接了航空瞬变电磁法的空中快速勘探的优势。与地面瞬变电磁法相比,半航空瞬变电磁法的工作效率更加高速,摆脱了地形环境的制约,可以大大减少人员成本;与航空瞬变电磁相比,半航空瞬变电磁系统的探测方式安全性更高,勘测成本更低,而且采集的信号信噪比更高;相比于传统的电法探测方式,半航空瞬变电磁探测系统的探测区域更加全面,系统能够采集到更加丰富的信息量,最终能够更加全面的反映地下地质体信息。尤其,在荒漠、山区等人员无法到达的地质勘察中,能够有效降低勘探风险,节约人员成本,提高勘察效率。
3.在瞬变电磁法探测中,根据法拉第电磁感应定律,增大线圈有效面积,能够增加感应电动势,而有效面积可以通过增加线圈直径或增加线圈匝数实现。但无论增加线圈直径还是增加线圈匝数都会使线圈自感增强。当增加线圈直径时,线圈有效面积以二阶速度增加,线圈电感增速则小于二阶;当增加线圈匝数时,线圈有效面积以一阶速度增加,而线圈电感以二阶速度增加。所以在实际中为了获得更大的有效面积,同时还不相对增大线圈电感,常常采用大直径接收线圈。然而,在半航空瞬变电磁探测中,受无人机搭载能力限制,多采用多匝小线圈,导致线圈固有过渡过程影响加剧,浅层探测效果受到严重干扰。若要避免多匝小线圈过渡过程影响,必然要采用大线圈,而大线圈在无人机搭载飞行过程中,易受空气阻力干扰,难以保持线圈空中形态的稳定性,进而导致线圈切割磁感线产生数据干扰。
4.目前无人机根据挂载方式主要分为三种技术:
5.硬架式结构:将接收机通过硬架和无人机相连。如果硬架较短,无人机噪声会通过硬架传递到接收机内;如果硬架太长,影响无人机平衡、起飞和降落,降低无人机的操作安全性。
6.内藏式结构:将接收机直接挂在无人机内部,电磁噪声较大,信噪比较低,但是需要修改无人机的气动布局,价格昂贵。
7.垂吊式结构:将接收机通过软线和无人机相连,无人机电磁噪声通过软线传递,可以达到低噪声。但存在线圈传感器随飞行姿态摆动,引入摆动噪声。
技术实现要素:
8.本实用新型的发明目的在于:针对现有技术存在无人机线圈固有过渡过程效应影响数据采集质量的问题,提供应用于半航空瞬变电磁探测的接收系统装置,能够避免小线圈过渡过程影响,同时保持大线圈在飞行过程中的姿态稳定,该装置具有隔绝无人机振动噪声、维持线圈空中姿态稳定的作用。
9.为了实现上述目的,本实用新型采用的技术方案为:
10.应用于半航空瞬变电磁探测的接收系统装置,其包括运载无人机、阻尼弹簧、搭载平台架、多级固定装置、接收线圈和绳索,运载无人机设有至少三个,阻尼弹簧的顶底两端分别连接运载无人机和搭载平台架,相邻绳索顶端之间的间距大于绳索底端之间的间距,绳索的顶底两端分别连接搭载平台架和接收线圈外缘,多级固定装置的外端连接至绳索中部。
11.通过多个运载无人机能够协同工作,确保接收线圈的所处状态,减少晃动幅度,通过阻尼弹簧为悬吊的搭载平台架、绳索和接收线圈提供缓冲,减少了振动,通过搭载平台架为绳索和接收线圈提供悬挂的结构,并扩大了挂载空间大小,通过绳索便于接收线圈的设置并保持接收线圈在飞行途中的位置,提高了接收线圈的稳定性,通过阻尼弹簧和绳索,能够维持接收线圈在飞行途中的稳定状态,通过多级固定装置方便多根绳索之间保持间距,维持稳定状态;该接收系统装置有利于提高半航空瞬变电磁原始数据采集质量,提高半航空瞬变电磁法探测范围和探测精度。
12.在实用新型较佳的实施方案中,上述搭载平台架为交叉的杆件结构,杆件结构的外端与阻尼弹簧连接;通过搭载平台架的杆件结构设置,能够在绳索之间形成刚性结构,提供绳索的悬挂位置。
13.在实用新型较佳的实施方案中,上述多级固定装置为交叉的杆件结构,杆件结构的端部与绳索中部连接;通过多级固定装置的杆件结构设置,能够保持各绳索之间的间距,保持绳索在飞行过程中不会任意变形,保持整体形状和结构。
14.在实用新型较佳的实施方案中,上述搭载平台架所在面与多级固定装置所在面平行;通过搭载平台架和多级固定装置的设置,有助于维持绳索和接收线圈的平衡。
15.在实用新型较佳的实施方案中,上述阻尼弹簧设有至少两根,相邻阻尼弹簧的底端之间的间距大于相邻阻尼弹簧的顶端之间的间距;通过多根阻尼弹簧设置,能够提供较大的缓冲,减少一根阻尼弹簧的受力,提高了所悬挂结构的稳定性,通过相邻阻尼弹簧形成的分叉结构,在飞行过程中,能够在各个方向上吸收无人机运动扰动,减少所悬挂结构的冲击。
16.在实用新型较佳的实施方案中,上述搭载平台架在水平面上为轴对称和中心对称的结构;通过搭载平台架的对称结构设置,能够保持接收系统装置的平衡,使得搭载平台架及连接结构的均衡受力。
17.在实用新型较佳的实施方案中,上述多个运载无人机围绕在搭载平台架外周上方,且多个运载无人机关于搭载平台架的竖向中心呈轴对称和中心对称;通过多个运载无人机的设置,能够在飞行的前后左右各个方向保持驱动平衡,减少无人机飞行对接收线圈产生的影响。
18.在实用新型较佳的实施方案中,上述应用于半航空瞬变电磁探测的接收系统装置还包括接收机,接收机固定在搭载平台架上;通过接收机,能够接收线圈产生的瞬变电磁数据。
19.综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
20.本发明将无人机与搭载平台通过阻尼弹簧连接,确保无人机与搭载平台的稳定连接;通过搭载平台增加了线圈挂载空间,令挂载固定点距离大于线圈直径有利于维持线圈
空中姿态的稳定性;挂载平台为无人机提供了足够的工作空间,有利于扩充无人机,提升系统负载,以及进一步安装线圈固定装置,提高线圈稳定性,同时也为采用大直径线圈提供了条件。本发明有利于提高半航空瞬变电磁原始数据采集质量,以及提高半航空瞬变电磁法探测范围和探测精度。
附图说明
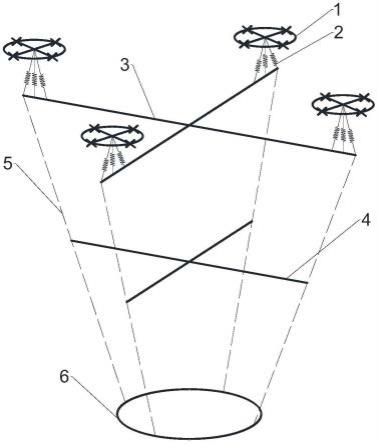
21.图1是本实用新型应用于半航空瞬变电磁探测的接收系统装置的结构示意图;
22.图2是本实用新型应用于半航空瞬变电磁探测的接收系统装置的侧视结构示意图;
23.图3是现有技术的挂载固定点距离大于线圈直径系统受力分析图;
24.图4是本实用新型的挂载固定点距离小于线圈直径系统受力分析图。
25.图中标记:1-运载无人机;2-阻尼弹簧;3-搭载平台架;4-多级固定装置;5-绳索;6-接收线圈。
具体实施方式
26.下面结合附图,对本实用新型作详细的说明。
27.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
28.实施例1
29.请参照图1和图2,本实施例提供应用于半航空瞬变电磁探测的接收系统装置,其包括运载无人机1、阻尼弹簧2、搭载平台架3、多级固定装置4、接收线圈6和绳索5,运载无人机1设于接收系统装置的顶部,阻尼弹簧2连接在运载无人机1的底端,搭载平台架3通过阻尼弹簧2进行连接,多级固定装置4将多根绳索5连接,接收线圈6通过绳索5连接至搭载平台架3,运载无人机1和阻尼弹簧2都为方位对称分布;该接收系统装置通过搭载平台架3为绳索5和线圈提供悬挂的结构并扩大了挂载空间大小,通过绳索5便于线圈的设置并保持线圈在飞行途中的位置,提高了线圈的稳定性,通过阻尼弹簧2和绳索5,能够维持线圈在飞行途中的稳定状态,通过多级固定装置4方便多根绳索5之间保持间距,维持稳定状态,有利于提高半航空瞬变电磁原始数据采集质量,提高半航空瞬变电磁法探测范围和探测精度。
30.本实施例中,运载无人机1设有四个,通过多个运载无人机1能够协同工作,确保线圈的所处状态,减少晃动幅度,四个运载无人机1围绕在搭载平台架3外周上方,且四个运载无人机1关于搭载平台架3的竖向中心呈轴对称和中心对称,这样四个运载无人机1均衡分布在接收系统装置上,这样能够在飞行的前后左右各个方向保持驱动平衡,减少无人机飞行对线圈产生的影响;运载无人机1采用现有的无人机,运载无人机1的底部中心位置设有连接环,用于连接一组阻尼弹簧2,每组阻尼弹簧2包括三根阻尼弹簧2,三根阻尼弹簧2的顶端共同连接在一起并焊接至运载无人机1底部的连接环,三根阻尼弹簧2呈分叉状设置,且三根阻尼弹簧2位置同一平面上,使得三根阻尼弹簧2的底端之间的间距大于相邻阻尼弹簧2的顶端之间的间距,阻尼弹簧2的底端连接至搭载平台架3,通过焊接的方式固定;通过多根阻尼弹簧2设置,能够提供较大的缓冲,减少一根阻尼弹簧2的受力,提高了所悬挂结构的
稳定性,通过相邻阻尼弹簧2形成的分叉结构,在飞行过程中,能够在各个方向上,吸收无人机运动扰动,减少所悬挂结构的冲击,为悬吊的搭载平台架3、绳索5和线圈提供缓冲,减少了振动,保持搭载平台架3的稳定性。
31.本实施例中,搭载平台架3和多级固定装置4分别设为交叉的杆件结构,搭载平台架3和多级固定装置4可采用轻质、坚硬的材料,并且根据流体力学进行设计,减少空气阻力,减轻无人机负载;搭载平台架3和多级固定装置4分别呈十字架形,使得搭载平台架3在水平面上为轴对称和中心对称的结构,该对称结构能够保持接收系统装置的平衡,使得搭载平台架3及连接结构的均衡受力,搭载平台架3由两根杆件搭设形成,为一体成型结构,在搭载平台架3上还安装有接收机,接收机固定在搭载平台架3的两根杆件的交叉中部位置,通过接收机,能够接收线圈6产生的瞬变电磁数据;搭载平台架3的杆件的外端分别与每组阻尼弹簧2连接,每组三根阻尼弹簧2的底端分别与搭载平台架3的外端部焊接固定,通过搭载平台架3的杆件结构设置,能够在绳索5之间形成刚性结构,提供绳索5的悬挂位置;多级固定装置4同样由两根杆件搭设形成,为一体成型结构,多级固定装置4的杆件的外端分别设有绳索5孔,绳索5穿过该孔与多级固定装置4过盈配合,使得多级固定装置4连接在四根绳索5的中部,并与绳索5的相对位置保持固定,通过多级固定装置4的杆件结构设置,能够保持各绳索5之间的间距,保持绳索5在飞行过程中不会任意变形,保持整体形状和结构,当运载无人机1负载充裕时,可增加次级固定装置,形成两级固定装置,两个固定装置上下间隔且平行设置,可进一步稳固线圈形态;搭载平台架3与多级固定装置4平行设置,使得搭载平台架3所在面与多级固定装置4所在面平行,具体为搭载平台架3的两根杆件分别与多级固定装置4的两根杆件平行,通过搭载平台架3和多级固定装置4的设置,有助于维持绳索5和线圈的平衡。
32.本实施例中,共设置有四根绳索5,四根绳索5的顶端分别绑扎至搭载平台架3的杆件外端位置,四根绳索5的底端分别绑扎至接收线圈6的外缘处,保持每根绳索5相对于搭载平台架3的倾斜角度一致,而相邻绳索5顶端之间的间距大于绳索5底端之间的间距,即搭载平台架3的长度大于接收线圈6的直径,即搭载固定点之间的距离大于接收线圈6的直径,该设置有助于接收线圈6保持稳定状态;下面通过分析线圈模型受力情况进行说明:
33.请参照图3,若采用搭载固定点距离小于线圈直径的模型,当接收系统装置处于稳定状态时,接收线圈6受重力和两侧绳索5的拉力保持平衡,若接收线圈6随运载无人机1飞行过程中受到风力或惯性力作用,由于左右方向的对称性,我们仅分析力向右侧作用的情况。风力或惯性力将打破力平衡状态,此时接收线圈6将绕固定点a做圆周运动,具有斜向下的切向加速度,合力力的方向与加速度方向一致,由于风力或惯性力水平分量和竖直分量与绳索5拉力的水平分量和重力的方向一致。显然,风力或惯性力想要打破力平衡状态较为容易,极端情况下,搭载固定点距离为零,此时接收系统装置变为阻尼单摆系统,在风力或惯性力作用下将作阻尼单摆运动。
34.请参照图4,若采用本实施例的接收系统装置,搭载固定点距离大于线圈直径的模型。当接收系统装置处于稳定状态时,接收线圈6受重力和两侧绳索5的拉力保持平衡,若接收线圈6随无人机飞行过程中受到风力或惯性力作用,由于左右方向的对称性,我们仅分析力向右侧作用的情况。风力或惯性力将打破力平衡状态,此时接收线圈6将绕固定点a做圆周运动,具有斜向上的切向加速度,由于合力的方向与加速度方向一致,因此风力或惯性力
需要克服左侧绳索5水平向左分量的拉力和竖直向下的重力。显然,由于拉力和重力的作用,风力或惯性力想要打破力平衡状态并不容易,并且在打破力平衡后会快速重新恢复到力平衡状态。
35.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1