一种基于机器人的天线罩测试装置的制作方法
1.本实用新型属于电性能测试领域,特别涉及一种基于机器人的天线罩测试装置。
背景技术:
2.现有模拟装机状态的电性能测试是通过转台将天线和天线罩安装在滚环上,设计工装保障天线的转动中心与滚环的滚动中心重合,天线的方位轴、俯仰轴分别与转台的方位轴、俯仰轴同轴,实现天线与天线罩随动和不随动的运动状态,保障实现装机状态下天线罩电性能的测试。而现有的转台存在非标准化、笨重、控制不灵活等问题。
技术实现要素:
3.本实用新型提供一种基于机器人的天线罩测试装置,使用的两个机器人共有12个轴,可保障测试状态的灵活性。可驱动各轴将天线罩降低到指定的区域,实现在地面卸载或安装天线罩,可省去升降平台。本实用新型可实现转台、天线座测试天线罩的功能。
4.一种基于机器人的天线罩测试装置,包括:天线罩机器人、天线机器人、天线、滚环、天线罩、转接工装;
5.所述天线罩机器人安装在地面上,天线罩机器人的工作法兰盘上连接转接工装;
6.所述转接工装下方固定滚环,所述天线罩固定在滚环上,且所述滚环可带动天线罩转动;所述天线罩机器人通过转接工装带动天线罩旋转、俯仰运动;
7.所述天线机器人的腕摆动轴上固定天线,所述天线机器人带动天线旋转、俯仰运动从而调节天线姿态。
8.进一步,所述天线罩机器人和天线机器人均为六轴串联垂直机器人。
9.进一步,所述转接工装包括:矩形块和门型框架;所述矩形块固定在天线罩机器人工作法兰盘上,所述们型框架固定在矩形块下方,所述门型框架下方固定滚环。
10.进一步,所述装置还包括:垂直支杆和水平支杆;所述垂直支杆固定在地面上,所述水平支杆垂直固定在垂直支杆顶端,所述天线机器人固定在水平平支杆远离垂直支杆一侧。
11.进一步,所述天线机器人的腰回转轴固定在门型框架顶端。
12.进一步,所述天线机器人的腰回转轴与天线罩机器人的腰回转轴同轴。
13.进一步,天线的阵面中心位于天线机器人腰回转轴轴线上。
14.有益效果:本实用新型采用双机器人实现装机状态天线罩电性能测试状态,可代替转台和天线座实现一定重量天线、一定形状天线罩的电性能测试的功能。
附图说明
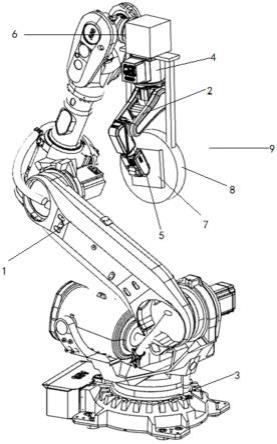
15.图1为天线机器人与天线罩机器人随动状态示意图;
16.图2为天线机器人与天线罩机器人分体单独运动状态示意图;
17.1天线罩机器人;2天线机器人;3天线罩机器人腰回转轴(方位轴);4天线机器人腰
回转轴(方位轴);5天线机器人腕摆动轴(俯仰轴);6天线罩机器人手回转轴(俯仰轴);7天线;8滚环;9天线罩;10垂直支杆;11水平支杆。
具体实施方式
18.如图1所示,本实用新型为将天线7和天线罩9分别安装在六轴垂直串联机器人1上,实现天线罩方向图、瞄准误差和传输效率的测试状态,实现转台、天线座测试天线罩的功能。
19.本实用新型首先实现天线7和天线罩9随动的状态。通过工装将控制天线的机器人2倒置悬挂在控制天线罩的机器人法兰盘上。通过驱动天线罩机器人1和工装保障可实现两机器人腰回转轴同轴,即实现天线、天线罩方位轴同轴。
20.可直接将天线7安装在法兰盘上,也可在天线法兰盘上先安装工装然后将天线7安装在此工装上。一种可滚动的滚环8通过工装安装在天线罩机器人1的法兰盘上,然后将天线罩9安装在滚环8上。驱动天线机器人2各轴使天线机器人2法兰盘中心位于天线7、天线罩8方位轴上。机器人默认的tcp点(tool control point)为法兰盘中心,示教器或离线编程软件可控制机器人围绕tcp点旋转,利用四点法可重新获取机器人的tcp点,四点法获取机器人tcp点为将要设置的点以不同的空间位置和姿态连续四次到达同一点获取数据,从而重新得到机器人的tcp点,可通过在机器人软件上实现。利用四点法设置天线罩机器人1和天线机器人2的tcp点在天线7阵面中心,可实现天线俯仰轴和天线罩俯仰轴同轴。
21.驱动天线机器人2各轴可实现天线阵面几何中心与滚环的滚动中心重合。
22.可实现天线和天线罩随动的状态的,可实现天线罩方向图的电性能测试状态。
23.如图2所示,从天线罩机器人1上拆除天线机器人2,将天线机器人2倒置悬挂在水平支杆11上,实现天线机器人不随动与天线罩机器人,其他位置状态保持不变,设置天线机器人2和天线罩机器人的tcp点在天线阵面中心上,根据机器人重定向运动、线性运动、单轴运动的特点驱动两机器人运动,可实现两机器人的方位轴同轴、俯仰轴同轴、天线阵面几何中心与滚环的滚动中心重合,这样可实现天线与天线罩不随动的状态。
24.天线罩机器人1和天线机器人2都是六轴垂直串联机器人,天线机器人2倒置悬挂安装在天线罩机器人1上;
25.天线机器人2通过转接工装连接在天线罩机器人1的法兰盘上,调节天线罩机器人1的各轴和工装保障可实现天线罩机器人1的天线罩机器人腰回转轴3(方位轴)和天线机器人2的天线机器人腰回转轴4(方位轴)重合,天线罩机器人1可带动所有物体做方位运动,实现方向图测试的状态;
26.通过调节天线机器人2的各轴可使天线机器人2的法兰盘中心在天线罩机器人腰回转轴3、天线机器人腰回转轴4上,天线7通过工装连接在天线机器人2的法兰盘上;
27.机器人默认的tcp点(tool control point)为法兰盘中心,示教器或离线编程软件可控制机器人围绕tcp点旋转,利用四点法可重新获取机器人的tcp点,四点法为将要设置的点以不同的空间位置和姿态连续四次到达同一点获取数据,从而得到机器人的tcp点,可通过在abb的robot studio软件上实现。重新设置天线罩机器人1的tcp点与天线机器人2的tcp点均在天线机器人腕摆动轴5的阵面中心上,这样可实现天线罩机器人1和天线机器人2的俯仰轴重合;
28.安装角度编码器读取天线7、天线罩9俯仰时的角度。
技术特征:
1.一种基于机器人的天线罩测试装置,其特征在于:所述装置包括:天线罩机器人、天线机器人、天线、滚环、天线罩、转接工装;所述天线罩机器人设置在地面上,天线罩机器人的工作法兰盘上连接转接工装;所述转接工装下方固定滚环,所述天线罩固定在滚环上,且所述滚环可带动天线罩转动;所述天线罩机器人通过转接工装带动天线罩旋转、俯仰运动;所述天线机器人的腕摆动轴上固定天线,所述天线机器人带动天线旋转、俯仰运动从而调节天线姿态。2.根据权利要求1所述的装置,其特征在于:所述天线罩机器人和天线机器人均为六轴串联垂直机器人。3.根据权利要求2所述的装置,其特征在于:所述转接工装包括:矩形块和门型框架;所述矩形块固定在天线罩机器人工作法兰盘上,所述门型框架固定在矩形块下方,所述门型框架下方固定滚环。4.根据权利要求1所述的装置,其特征在于:所述装置还包括:垂直支杆和水平支杆;所述垂直支杆固定在地面上,所述水平支杆垂直固定在垂直支杆顶端,所述天线机器人固定在水平平支杆远离垂直支杆一侧。5.根据权利要求3所述的装置,其特征在于:所述天线机器人的腰回转轴固定在门型框架顶端。6.根据权利要求5所述的装置,其特征在于:所述天线机器人的腰回转轴与天线罩机器人的腰回转轴同轴。7.根据权利要求6所述的装置,其特征在于:天线的阵面中心位于天线机器人腰回转轴轴线上。
技术总结
本实用新型属于天线罩电性能试验领域,公开了一种基于机器人的天线罩测试装置,包括:天线罩机器人、天线机器人、天线、滚环、天线罩、转接工装;所述天线罩机器人安装在地面上,天线罩机器人的工作法兰盘上连接转接工装;所述转接工装下方固定滚环,所述天线罩固定在滚环上,且所述滚环可带动天线罩转动;所述天线罩机器人通过转接工装带动天线罩旋转、俯仰运动;所述天线机器人的腕摆动轴上固定天线,所述天线机器人带动天线旋转、俯仰运动从而调节天线姿态。天线姿态。天线姿态。
技术研发人员:蒋小杰 李传兰 薛洪明
受保护的技术使用者:中国航空工业集团公司济南特种结构研究所
技术研发日:2022.07.20
技术公布日:2023/1/12
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1