一种手持式全向激光雷达三维扫描建模系统装置的制作方法
1.本实用新型涉及激光探测领域,具体包括一种手持式全向激光雷达三维扫描建模系统装置。
背景技术:
2.三维激光雷达具有测量范围大、测距精度高、抗干扰能力强等优点,由于其成本的逐年降低,激光雷达正广泛应用于机器人、自动驾驶以及地理测绘等领域。然而,现有三维激雷达全方位扫描用于定位建图还存在以下问题:
3.(1)激光雷达垂直方向的分辨率较低,使其不能满足特定场景下机器人导航和稠密建图等需求。通过增加激光雷达扫描线束来增大垂直分辨率,将导致激光雷达的制造成本急剧增加;
4.(2)激光雷达数据采样频率低,搭载在速度较快的设备上会存在一定的运动畸变,从而无法满足扫描需要;
5.(3)激光雷达结合惯性传感器可以在一定程度上解决运动畸变的问题,但忽略这两种传感器之间的时间同步,将会产生相互冲突的数据,这些数据很难被算法融合。
6.(4)将激光雷达固定在移动机器人进行扫描,无法覆盖扫描整个三维环境,从而无法建立稠密环境地图;同时,激光雷达固定,人为携带数据扫描采集十分不便;
7.(5)人为携带激光雷达进行数据扫描采集时,由于点云数据量较大,需要使用配置较好的处理器进行处理,同时配套数据存储器、电池等不便于携带。
技术实现要素:
8.针对现有技术中的上述不足,本实用新型提供的一种手持式全向激光雷达三维扫描建模系统装置解决了激光雷达不便携带、增加激光雷达线束来增大垂直分辨率成本较高、激光雷达结合惯性传感器时间不同步的问题。
9.为了达到上述发明目的,本实用新型采用的技术方案为:一种手持式全向激光雷达三维扫描建模系统装置,包括手持端和便携端;手持端和便携端相互连接;
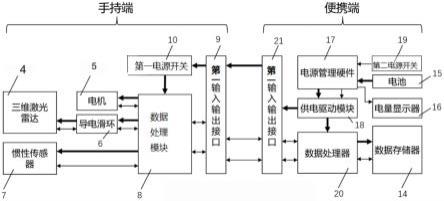
10.所述手持端包括手持端壳体、手持柄、固定支持件、三维激光雷达、空心轴带编码器电机、导电滑环、惯性传感器、数据处理模块、第一输入输出接口、第一电源开关;
11.空心轴带编码器电机、导电滑环、惯性传感器、数据处理模块安装在手持端壳体的腔体内部;手持柄安装在手持端壳体的中部;第一电源开关安装在手持端壳体的头部;三维激光雷达安装在固定支持件的头部;固定支持件的尾部安装在空心轴带编码器电机的转动轴上;第一输入输出接口安装在手持端壳体的尾部;
12.三维激光雷达通过导电滑环与数据处理模块电连接;数据处理模块分别和空心轴带编码器电机、惯性传感器、第一电源开关和第一输入输出接口电连接。
13.进一步地,所述三维激光雷达相对于空心轴带编码器电机倾斜15度。
14.进一步地,所述便携端包括便携端壳体、手提柄、存储器收纳结构、数据存储器、电
池、电量显示器、电源管理硬件、供电驱动模块、第二电源开关、数据处理器、第二输入输出接口;
15.数据处理器、电池、供电驱动模块和电源管理硬件安装在便携端壳体内部;手提柄安装在便携端壳体上部;第二输入输出接口设置在手提柄和存储器收纳结构之间;数据存储器安装在存储器收纳结构的腔体内部;第二电源开关安装在电量显示器和存储器收纳结构之间;
16.第二输入输出接口和供电驱动模块、数据处理器电连接;数据存储器和数据处理器电连接;供电驱动模块和电源管理硬件电连接;供电驱动模块和数据处理器电连接;电源管理硬件和电池、第二电源开关、电量显示器电连接;其中第二电源开关用于向电源管理硬件发送信号从电池取电。
17.进一步地,数据处理模块包括型号为stm32f103ret7的芯片u13、时间同步模块、隔离和时间同步模块;
18.隔离和时间同步模块包括型号为isow7841aqdweq1的芯片u9;芯片 u13的引脚51通过电阻r43和芯片u9的引脚5相连接;芯片u13的引脚52 通过电阻r44和芯片u9的引脚6相连接;芯片u13的引脚54通过电阻r42和芯片u9的引脚4相连接;芯片u9的引脚2连接电容c50的一端、电容c51的一端并接地;芯片u9的引脚1连接电容c50的另一端、c51的另一端和3.3v 的电压;芯片u9的引脚8接地;芯片u9的引脚9连接电容c58的一端、电容 c57的一端、电容c56的一端并接地;芯片u9的引脚11连接电容c58的另一端和电阻r32的一端;电阻r32的另一端和惯性传感器电源端的负极接口相连接;芯片u9的引脚12和电阻r31的一端相连接;电阻r31的另一端连接电容 c57的另一端及惯性传感器电源的正极接口相连接;芯片u9的引脚13和电阻 r30的一端相连接;电阻r30的另一端和电容c56的另一端及惯性传感器的时间同步接口相连接;芯片u9的引脚15连接电容c53的一端、电容c52的一端并接地;芯片u9的引脚16连接电容c53的另一端、电容c52的另一端和5v 的电压。
19.进一步地,时间同步模块包括型号为isow7841aqdweq1的芯片u7;芯片u13的引脚20通过电阻r41和芯片u7的引脚5相连接;芯片u13的引脚21通过电阻r40和芯片u7的引脚4相连接;芯片u7的引脚2连接电容c40 的一端、电容c41的一端并接地;芯片u7的引脚1连接电容c40的另一端、电容c41的另一端和3.3v的电压;芯片u7的引脚16连接电容c39的一端、电容c38的一端和5v的电压;芯片u7的引脚15连接电容c39的另一端、电容c38的另一端并接地;芯片u7的引脚13连接电阻r20的一端;电阻r20的另一端连接电容c42的一端及三维激光雷达相连接;芯片u7的引脚12连接电阻r21的一端;电阻r21的另一端连接电容c43的一端及三维激光雷达相连接;芯片u7的引脚9连接电容c42的另一端、电容c43的另一端并接地。
20.本实用新型的有益效果为:
21.(1)采用手持端和便携端分开的方式,将重量较重的数据处理器、数据存储器、电池等模块放到便携端方便携带,更好的减轻手持端重量,方便人为手持进行数据采集。
22.(2)采用倾斜安装三维激光雷达围绕额外轴旋转的方式,使得装置能够在整个空间进行均匀的全向扫描,更好的解决三维激光雷达垂直方向的分辨率较低,并降低了成本。
23.(3)利用高频惯性传感器,能更好在移动过程去除手持端三维激光雷达扫描产生的畸变,增加定位和建图的精度。
24.(4)增加惯性传感器、空心轴带编码器电机、三维激光雷达数据之间的时间同步数
据处理模块,能够将三者数据时间进行同步,从而更加容易融合两中传感器的数据,降低两种传感器时间不一致融合的误差,增加系统鲁棒性。
附图说明
25.图1为装置电气结构示意图;
26.图2为手持端结构示意图;
27.图3为便携端结构示意图;
28.图4为时间同步模块结构图;
29.图5为隔离和时间同步模块结构图;
30.图6为数据处理模块-第一输入输出接口电平转换电路图;
31.图7为电流控制电路图;
32.图8为电机-数据处理模块电平转换电路图的第一部分;
33.图9为电机-数据处理模块电平转换电路图的第二部分。
34.其中:1、手持端壳体;2、手持柄;3、固定支持件;4、三维激光雷达;5、空心轴带编码器电机;6、导电滑环;7、惯性传感器;8、数据处理模块;9、第一输入输出接口;10、第一电源开关;11、便携端壳体;12、手提柄;13、存储器收纳结构;14、数据存储器;15、电池;16、电量显示器;17、电源管理硬件;18、供电驱动模块;19、第二电源开关;20、数据处理器;21、第二输入输出接口。
具体实施方式
35.下面对本实用新型的具体实施方式进行描述,以便于本技术领域的技术人员理解本实用新型,但应该清楚,本实用新型不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本实用新型的精神和范围内,这些变化是显而易见的,一切利用本实用新型构思的发明创造均在保护之列。
36.如图1所示,一种手持式全向激光雷达三维扫描建模系统装置,包括手持端和便携端;手持端和便携端相互连接;
37.三维激光雷达4通过导电滑环6与数据处理模块8电连接;数据处理模块8 分别和空心轴带编码器电机5、惯性传感器7、第一电源开关10和第一输入输出接口9电连接;
38.第二输入输出接口21和供电驱动模块18、数据处理器20电连接;数据存储器14和数据处理器20电连接;供电驱动模块18和电源管理硬件17电连接;供电驱动模块18和数据处理器20电连接;电源管理硬件17和电池15、第二电源开关19、电量显示器16电连接;其中第二电源开关19用于向电源管理硬件 17发送信号从电池15取电。
39.如图2所示,所述手持端包括手持端壳体1、手持柄2、固定支持件3、三维激光雷达4、空心轴带编码器电机5、导电滑环6、惯性传感器7、数据处理模块8、第一输入输出接口9、第一电源开关10;
40.空心轴带编码器电机5、导电滑环6、惯性传感器7、数据处理模块8安装在手持端壳体1的腔体内部;手持柄2安装在手持端壳体1的中部;第一电源开关10安装在手持端壳体1的头部;三维激光雷达4安装在固定支持件3的头部;固定支持件3的尾部安装在空心轴带编码器电机5的转动轴上;第一输入输出接口9安装在手持端壳体1的尾部;三维激光雷达4相
对于空心轴带编码器电机5倾斜15度。
41.如图3所示,所述便携端包括便携端壳体11、手提柄12、存储器收纳结构 13、数据存储器14、电池15、电量显示器16、电源管理硬件17、供电驱动模块18、第二电源开关19、数据处理器20、第二输入输出接口21;
42.数据处理器20、电池15、供电驱动模块18和电源管理硬件17安装在便携端壳体11内部;手提柄12安装在便携端壳体11上部;第二输入输出接口21 设置在手提柄12和存储器收纳结构13之间;数据存储器14安装在存储器收纳结构13的腔体内部;第二电源开关19安装在电量显示器16和存储器收纳结构 13之间。
43.如图4所示,时间同步模块包括型号为isow7841aqdweq1的芯片u7;芯片u13的引脚20通过电阻r41和芯片u7的引脚5相连接;芯片u13的引脚 21通过电阻r40和芯片u7的引脚4相连接;芯片u7的引脚2连接电容c40 的一端、电容c41的一端并接地;芯片u7的引脚1连接电容c40的另一端、电容c41的另一端和3.3v的电压;芯片u7的引脚16连接电容c39的一端、电容c38的一端和5v的电压;芯片u7的引脚15连接电容c39的另一端、电容c38的另一端并接地;芯片u7的引脚13连接电阻r20的一端;电阻r20的另一端连接电容c42的一端及三维激光雷达4相连接;芯片u7的引脚12连接电阻r21的一端;电阻r21的另一端连接电容c43的一端及三维激光雷达4相连接;芯片u7的引脚9连接电容c42的另一端、电容c43的另一端并接地。
44.如图5所示,隔离和时间同步模块包括型号为isow7841aqdweq1的芯片u9;芯片u13的引脚51通过电阻r43和芯片u9的引脚5相连接;芯片u13 的引脚52通过电阻r44和芯片u9的引脚6相连接;芯片u13的引脚54通过电阻r42和芯片u9的引脚4相连接;芯片u9的引脚2连接电容c50的一端、电容c51的一端并接地;芯片u9的引脚1连接电容c50的另一端、c51的另一端和3.3v的电压;芯片u9的引脚8接地;芯片u9的引脚9连接电容c58 的一端、电容c57的一端、电容c56的一端并接地;芯片u9的引脚11连接电容c58的另一端和电阻r32的一端;电阻r32的另一端和惯性传感器7电源端的负极接口相连接;芯片u9的引脚12和电阻r31的一端相连接;电阻r31的另一端连接电容c57的另一端及惯性传感器7电源的正极接口相连接;芯片u9 的引脚13和电阻r30的一端相连接;电阻r30的另一端和电容c56的另一端及惯性传感器7的时间同步接口相连接;芯片u9的引脚15连接电容c53的一端、电容c52的一端并接地;芯片u9的引脚16连接电容c53的另一端、电容c52的另一端和5v的电压。
45.如图6所示,电平转换电路将ttl电平转换为rs485电平,并和第一输入输出接口相连接。
46.如图7所示,电路采用隔离芯片u12控制电流大小,在空心轴带编码器电机5和芯片u13中起到控制电流,防止烧坏芯片的作用。
47.如图8和图9所示,在数据处理模块8和空心轴带编码器电机5之间将ttl 电平转换为rs485电平。
48.在本实用新型的一个实施例中,三维激光雷达4采用pandarxt 16线激光雷达,用于采集三维环境数据;导电滑环6采用m006a-12导电滑环,用于为旋转端的三维激光雷达与固定端之间的电气连接;惯性传感器7采用um7传感器;数据处理器20为intel-i7 11代处理器,上面搭载相应的数据通信模块和wifi6 模块,能更好的获取数据、处理数据和传输可显示数据,和图7类似,与第二输入输出接口21连接时,将ttl电平转换为rs485电平;数据处理器20与数据存储器14之间采用usb通信;电源管理硬件17用于管理整个系统的电源,并接收
第二电源开关19指令来判断是否驱动供电驱动模块18为整个系统供电,并驱动电量显示器16显示电量;
49.手持端与便携端通过有线连接,便携端的处理器控制便携端电机旋转带动激光雷达对环境数据进行扫描采集,并将处理的数据保存在数据存储器中,后续人为将其数据进行处理。
50.本实用新型采用手持端和便携端分开的方式,将重量较重的数据处理器20、数据存储器14、电池15等模块放到便携端方便携带,更好的减轻手持端重量,方便人为手持进行数据采集;采用倾斜安装三维激光雷达围绕额外轴旋转的方式,使得装置能够在整个空间进行均匀的全向扫描,更好的解决三维激光雷达垂直方向的分辨率较低,并降低了成本;利用高频惯性传感器7,能更好在移动过程去除手持端三维激光雷达4扫描产生的畸变,增加定位和建图的精度;增加惯性传感器7、空心轴带编码器电机5、三维激光雷达4数据之间的时间同步数据处理模块8,能够将三者数据时间进行同步,从而更加容易融合三种传感器的数据,降低三种传感器时间不一致融合的误差,增加系统鲁棒性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1