一种工业机器人末端位置精度的采集装置的制作方法
1.本实用新型涉及一种工业机器人末端位置精度的采集装置,属于检测技术领域。
背景技术:
2.机器人精度通常是通过激光跟踪仪进行校正机器人参数,提高重复定位精度等优点已经成功应用于各类的机器人厂家,但是针对特殊的位置,激光跟踪仪无法测量其精度,导致机器人的精度仅存在理论值中,在实际应用中无法体现某些特定位置的精度。
技术实现要素:
3.本实用新型的目的在于克服现有技术中存在的上述不足,而提供一种结构设计合理,解决了工业机器人在某一姿态的末端位置精度,让机器人的精度不仅仅只存在理论值中,还在实际打磨应用中体现出特定位置的实际精度的工业机器人末端位置精度的采集装置。
4.本实用新型解决上述问题所采用的技术方案是:该工业机器人末端位置精度的采集装置,包括底座、固定座、机器人和采集模块,所述固定座设置在底座上,所述机器人的法兰座设置在固定座上,所述采集模块设置在机器人的末端,其结构特点在于:所述底座上存在有打磨工位和上下料工位,所述打磨工位和上下料工位内分别设置有打磨支架和上下料支架,所述打磨支架和上下料支架上均设置有数显千分表,所述数显千分表与采集模块配合,所述底座和固定座上均设置有机械百分表,设置在底座上的机械百分表与固定座配合,设置在固定座上的机械百分表与机器人的法兰座配合。
5.进一步地,所述数显千分表包括一号数显千分表、二号数显千分表、三号数显千分表和四号数显千分表,所述一号数显千分表水平设置在打磨支架上,所述二号数显千分表倾斜设置在打磨支架上,所述三号数显千分表和四号数显千分表均水平设置在上下料支架上。一号数显千分表水平设置用于检测打磨过程中左、右位置的数据,二号数显千分表倾斜设置用于检测打磨过程中上、下、前、后位置的数据,三号数显千分表水平设置用于检测上下料过程中左、右位置的数据,四号数显千分表水平设置用于检测上下料过程中前、后位置的数据。
6.进一步地,所述采集模块上设置有数据采集a面和数据采集b面,所述数据采集a面与数据采集b面垂直设置,所述数据采集a面与一号数显千分表接触,所述数据采集b面与二号数显千分表接触。当数据采集a面与一号数显千分表接触时,可检测打磨过程中左、右位置的数据,当数据采集b面与二号数显千分表接触时,可检测打磨过程中上、下、前、后位置的数据。
7.进一步地,所述采集模块上设置有数据采集a面和数据采集b面,所述数据采集a面与数据采集b面垂直设置,所述数据采集a面与三号数显千分表接触,所述数据采集b面与四号数显千分表接触。当数据采集a面与三号数显千分表接触时,可检测上下料过程中左、右位置的数据,当数据采集b面与四号数显千分表接触时,可检测上下料过程中前、后位置的
数据。
8.进一步地,所述机械百分表包括一号机械百分表、二号机械百分表、三号机械百分表和四号机械百分表,所述一号机械百分表和二号机械百分表均设置在底座上,且一号机械百分表和二号机械百分表均与固定座接触,所述三号机械百分表和四号机械百分表均设置在固定座上,且三号机械百分表和四号机械百分表均与法兰座接触。通过一号机械百分表和二号机械百分表用于检测固定座与底座是否移动,通过三号机械百分表和四号机械百分表用于检测法兰座与固定座是否移动。
9.进一步地,所述固定座上设置有固定座a面和固定座b面,所述固定座a面与固定座b面垂直设置,所述固定座a面的端部和固定座b面的端部分别与一号机械百分表和二号机械百分表接触。当固定座a面的端部与一号机械百分表接触时,可检测出固定座是否沿着固定座b面方向移动,若将一号机械百分表设置于固定座a面的中部,则在固定座沿着固定座b面方向移动时,对一号机械百分表的影响较小,使得一号机械百分表的数据变化较小,不容易发现固定座相对于底座发生移动;当固定座b面的端部与二号机械百分表接触时,可检测出固定座是否沿着固定座a面方向移动,若将二号机械百分表设置于固定座b面的中部,则在固定座沿着固定座a面方向移动时,对二号机械百分表的影响较小,使得二号机械百分表的数据变化较小,不容易发现固定座相对于底座发生移动。
10.进一步地,所述法兰座上设置有法兰座a面和法兰座b面,所述法兰座a面与法兰座b面垂直设置,所述法兰座a面的端部和法兰座b面的端部分别与三号机械百分表和四号机械百分表接触。当法兰座a面的端部与三号机械百分表接触时,可检测出法兰座是否沿着法兰座b面方向移动,若将三号机械百分表设置于法兰座a面的中部,则在法兰座沿着法兰座b面方向移动时,对三号机械百分表的影响较小,使得三号机械百分表的数据变化较小,不容易发现法兰座相对于固定座发生移动;当法兰座b面的端部与四号机械百分表接触时,可检测出法兰座是否沿着法兰座a面方向移动,若将四号机械百分表设置于法兰座b面的中部,则在法兰座沿着法兰座a面方向移动时,对四号机械百分表的影响较小,使得四号机械百分表的数据变化较小,不容易发现法兰座相对于固定座发生移动。
11.进一步地,所述数显千分表与电脑端连接。
12.相比现有技术,本实用新型具有以下优点:在打磨工位通过设置的一号数显千分表可对机器人左、右位置的数据进行检测,在打磨工位通过设置的二号数显千分表可对机器人上、下、前、后的数据进行检测,在上下料工位通过设置的三号数显千分表可对机器人左、右位置的数据进行检测,在上下料工位通过设置的四号数显千分表可对机器人前、后位置的数据进行检测,同时在底座和固定座上各安装两个机械百分表可保证在数据采集时不会受到固定座和/或法兰座移动所产生的干扰。
附图说明
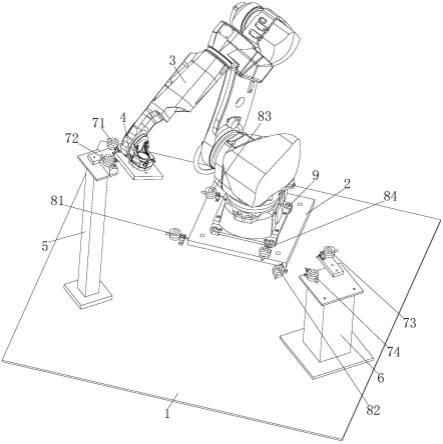
13.图1是本实用新型实施例的工业机器人末端位置精度的采集装置的立体结构示意图。
14.图2是本实用新型实施例的工业机器人末端位置精度的采集装置的立体结构示意图。
15.图3是本实用新型实施例的工业机器人末端位置精度的采集装置的主视结构示意
图。
16.图4是本实用新型实施例的工业机器人末端位置精度的采集装置的俯视结构示意图。
17.图中:底座1、固定座2、机器人3、采集模块4、打磨支架5、上下料支架6、法兰座9、
18.固定座a面21、固定座b面22、
19.数据采集a面41、数据采集b面42、
20.一号数显千分表71、二号数显千分表72、三号数显千分表73、四号数显千分表74、
21.一号机械百分表81、二号机械百分表82、三号机械百分表83、四号机械百分表84、
22.法兰座a面91、法兰座b面92。
具体实施方式
23.下面结合附图并通过实施例对本实用新型作进一步的详细说明,以下实施例是对本实用新型的解释而本实用新型并不局限于以下实施例。
24.实施例。
25.参见图1至图4所示,须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本实用新型可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本实用新型所能产生的功效及所能达成的目的下,均应仍落在本实用新型所揭示的技术内容能涵盖的范围内。同时,本说明书中若有引用如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本实用新型可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本实用新型可实施的范畴。
26.本实施例中的工业机器人末端位置精度的采集装置,包括底座1、固定座2、机器人3和采集模块4,所述固定座2设置在底座1上,所述机器人3的法兰座9设置在固定座2上,所述采集模块4设置在机器人3的末端,其中采集模块4的接收端型号为u-wave-r、发射端型号为u-wave-t。
27.本实施例中的所述底座1上存在有打磨工位和上下料工位,所述打磨工位和上下料工位内分别设置有打磨支架5和上下料支架6,所述打磨支架5和上下料支架6上均设置有数显千分表(数显千分表的型号为543-790b电子千分表),所述数显千分表与采集模块4配合,所述采集模块4上设置有数据采集a面41和数据采集b面42,所述数据采集a面41与数据采集b面42垂直设置。
28.本实施例中的数显千分表与电脑端连接,所述数显千分表包括一号数显千分表71、二号数显千分表72、三号数显千分表73和四号数显千分表74,一号数显千分表71水平设置用于检测打磨过程中左、右(如图3、4所示)位置的数据,二号数显千分表72倾斜设置用于检测打磨过程中上、下、前、后(如图3、4所示)位置的数据,三号数显千分表73水平设置用于检测上下料过程中左、右(如图3、4所示)位置的数据,四号数显千分表74水平设置用于检测上下料过程中前、后(如图3、4所示)位置的数据。
29.本实施例中的所述一号数显千分表71水平设置在打磨支架5上,所述二号数显千分表72倾斜设置在打磨支架5上,当采集模块4在打磨工位时,所述数据采集a面41与一号数
显千分表71接触,所述数据采集b面42与二号数显千分表72接触;当数据采集a面与一号数显千分表71接触时,可检测打磨过程中左、右位置的数据,当数据采集b面与二号数显千分表72接触时,可检测打磨过程中上、下、前、后(如图3、4所示)位置的数据。
30.本实施例中的所述三号数显千分表73和四号数显千分表74均水平设置在上下料支架6上,当采集模块4在上下料工位,所述数据采集a面41与三号数显千分表73接触,所述数据采集b面42与四号数显千分表74接触,当数据采集a面与三号数显千分表73接触时,可检测上下料过程中左、右(如图3、4所示)位置的数据,当数据采集b面与四号数显千分表74接触时,可检测上下料过程中前、后(如图3、4所示)位置的数据。
31.本实施例中的所述底座1和固定座2上均设置有机械百分表(机械百分表的型号为107-dx),设置在底座1上的机械百分表与固定座2配合,设置在固定座2上的机械百分表与机器人3的法兰座9配合。
32.本实施例中的所述机械百分表包括一号机械百分表81、二号机械百分表82、三号机械百分表83和四号机械百分表84,通过一号机械百分表81和二号机械百分表82用于检测固定座2与底座1是否移动,通过三号机械百分表83和四号机械百分表84用于检测法兰座9与固定座2是否移动。
33.本实施例中的所述一号机械百分表81和二号机械百分表82均设置在底座1上,且一号机械百分表81和二号机械百分表82均与固定座2接触,所述固定座2上设置有固定座a面21和固定座b面22,所述固定座a面21与固定座b面22垂直设置,所述固定座a面21的端部和固定座b面22的端部分别与一号机械百分表81和二号机械百分表82接触。
34.当固定座a面的端部与一号机械百分表接触时,可检测出固定座是否沿着固定座b面方向移动,若将一号机械百分表设置于固定座a面的中部,则在固定座沿着固定座b面方向移动时,对一号机械百分表的影响较小,使得一号机械百分表的数据变化较小,不容易发现固定座相对于底座发生移动。
35.当固定座b面的端部与二号机械百分表接触时,可检测出固定座是否沿着固定座a面方向移动,若将二号机械百分表设置于固定座b面的中部,则在固定座沿着固定座a面方向移动时,对二号机械百分表的影响较小,使得二号机械百分表的数据变化较小,不容易发现固定座相对于底座发生移动。
36.本实施例中的所述三号机械百分表83和四号机械百分表84均设置在固定座2上,且三号机械百分表83和四号机械百分表84均与法兰座9接触,所述法兰座9上设置有法兰座a面91和法兰座b面92,所述法兰座a面91与法兰座b面92垂直设置,所述法兰座a面91的端部和法兰座b面92的端部分别与三号机械百分表83和四号机械百分表84接触。
37.当法兰座a面的端部与三号机械百分表接触时,可检测出法兰座是否沿着法兰座b面方向移动,若将三号机械百分表设置于法兰座a面的中部,则在法兰座沿着法兰座b面方向移动时,对三号机械百分表的影响较小,使得三号机械百分表的数据变化较小,不容易发现法兰座相对于固定座发生移动。
38.当法兰座b面的端部与四号机械百分表接触时,可检测出法兰座是否沿着法兰座a面方向移动,若将四号机械百分表设置于法兰座b面的中部,则在法兰座沿着法兰座a面方向移动时,对四号机械百分表的影响较小,使得四号机械百分表的数据变化较小,不容易发现法兰座相对于固定座发生移动。
39.具体的说,该工业机器人末端位置精度的采集装置,将数显千分表固定在机器人3需要到达的姿态位置,如打磨工位和上下料工位,当机器人3到达位置后通过数显千分表记录本次数据,并通过采集模块4传输至电脑端(采集模块4为现有技术),从而能够较准确的反映机器人3在本位置的精度值。
40.为了消除底座1与固定座2、以及固定座2与法兰座9之间的位移而使整体的精度受到干扰,特此在底座1和固定座2上分别安装2个机械百分表,当机械百分表读数发生变化后,本次采集的数据无效,当机械百分表读数没有变化,才正常采集本次数据。
41.该工业机器人末端位置精度的采集装置的安装过程如下:第一步将机器人3通过法兰座9安装于固定座2上,将固定座2安装在底座1上;第二步在机器人3的末端安装采集模块4,采集模块4作为定位的参照物;第三步在底座1上根据图中位置安装打磨支架5和上下料支架6;第四步在打磨支架5和上下料支架6上分别安装2件数显千分表;第五步在打磨支架5上的一号数显千分表71和二号数显千分表72负责采集机器人3在打磨时的姿态数据;第六步在上下料支架6上的三号数显千分表73和四号数显千分表74负责采集机器人3在上下料时的姿态数据;第七步在底座1和固定座2上分别安装两个机械百分表,至此整套工装就安装完毕。
42.此外,需要说明的是,本说明书中所描述的具体实施例,其零、部件的形状、所取名称等可以不同,本说明书中所描述的以上内容仅仅是对本实用新型结构所作的举例说明。凡依据本实用新型专利构思所述的构造、特征及原理所做的等效变化或者简单变化,均包括于本实用新型专利的保护范围内。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离本实用新型的结构或者超越本权利要求书所定义的范围,均应属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1