一种车载式路面缺陷检测系统
1.本实用新型属于检测装置技术领域,具体为一种车载式路面缺陷检测系统。
背景技术:
2.随着我国经济和基建技术的发展,现已形成庞大的交通运输网络。交通量的激增使得路面产生横纵向、网状裂缝、车辙、凸起、坑洞等路面缺陷,极大程度上减少了道路的使用寿命,增加了交通事故的发生率。早期的路面缺陷检测主要采用传统的图像处理技术和人工手动检测,这些方法不仅费时费力,精度和速度都达不到要求,小波变换、直方图估计等基于传统图像处理的缺陷检测算法主要是在路面干净、无阴影和无大量干扰物的条件下进行的。随着路况复杂程度的加深(如阴影、油渍、杂物和井盖等干扰的出现),这些传统图像处理技术越来越难以满足实际检测要求。
3.实用新型专利cn213813372u公开了一种路面裂缝检测系统,包括定位模块、图像采集与显示模块,还包括与定位模块、图像采集与显示模块连接用于获取裂缝位置并识别裂缝情况的主控模块,与主控模块连接用于存储裂缝图像并对裂缝图像进行二次判断的远程服务模块。但是,该技术需要通过远程服务模块的神经网络对主控模块初次判断的图片进行二次识别,以确保检测的准确率,检测效率不高。
技术实现要素:
4.鉴于上述和/或现有路面缺陷检测技术中存在的问题,提出了本实用新型。
5.本实用新型的目的是提供一种车载式路面缺陷检测系统,该系统能够快速高效判别出路面缺陷的类型和位置信息。
6.本实用新型提供了如下技术方案:
7.一种车载式路面缺陷检测系统,包含:图像采集模块,定位模块,还包括与图像采集模块相连接用于提取路面缺陷并判别其缺陷类型的嵌入式ai计算模块,与定位模块和嵌入式ai计算模块相连接用于存储缺陷图像的工控机模块,以及显示路面缺陷信息的显示模块。
8.优选地,所述定位模块为skytra(斯卡特瑞克)公司的atk1218-bd,具有gps和北斗双模定位方式,满足在汽车行驶速度为60km/h下5m定位要求。
9.优选地,所述定位模块为topgnss(世导通电子科技有限公司)公司开发的zed-f9p蓝牙差分gps北斗模块,内置gnss模块,能够实现厘米级测量,同时满足车速120km/h 下5m定位精度要求。
10.优选地,所述图像采集模块选用大疆灵眸oaich高清运动相机,配置相机的帧率f 为60fps、分辨率为4096pixel
×
2160pixel。
11.优选地,所述嵌入式ai计算模块为英伟达发布的jetsonagxxavier,能够通过编程的方式向定位模块、图像采集模块发送指令,控制定位模块、图像采集模块进行同步信息采集,并对接收的信息进行数据处理。
12.优选地,所述工控机模块为东田工控开发的dtb-3049-h3110工控机,能够获取定位模块采集的路面的经纬度位置信息和日期/时间信息,通过编程软件生成路面缺陷分布地图,并将其接收的信息和处理后的结果发送到显示模块进行同步显示。
13.优选地,所述显示模块为斯波兰公司的便携式4k高清显示器,能够同步、同时显示目标检测结果、图像分割结果和路面缺陷分布地图。
14.优选地,所述车体后备箱中安装有一个用于容纳所述嵌入式ai计算模块、所述工控机模块的工作箱,所述工作箱内同时还放置有可为所述嵌入式ai计算模块和工控机模块供电的电源模块。
15.本实用新型与现有技术相比,具有如下有益效果:
16.1、嵌入式ai计算模块实现目标检测、图像分割神经网络检测路面缺陷,提高了路面缺陷的检测精度。
17.2、实时识别路面缺陷,无需上传服务器再进行处理,提高路面缺陷检测速率。
18.3、该系统能够在车速120km/h以下实时完成路面缺陷检测,定位精度在5m之内。
19.4、工控机模块接收定位模块采集的信息通过编程软件实时生成路面缺陷分布地图,便于工作人员后期道路养护和路面修复。
20.5、本系统核心检测模块小巧轻便,嵌入式ai计算模块、工控机模块和电源模块可组装置入长宽高尺寸为50cm
×
50cm
×
30cm的工作箱中,适于安装在车体内。
21.6、大疆灵眸oaich高清运动相机实时拍摄路面,保证了路面图像清晰度和拍摄范围的广度,可保障路面图像分割模型检测缺陷的效率和精度。
附图说明
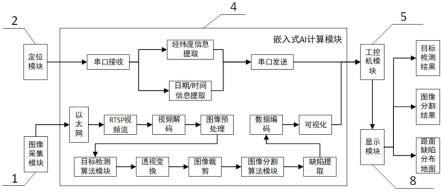
22.图1为本实用新型的系统结构框图及信息处理流程示意图;
23.图2为本实用新型的系统各模块车载安装结构示意图。
24.图中:图像采集模块1,定位模块2、箱体3、嵌入式ai计算模块4、工控机模块5、电源模块6、车体7、显示模块8。
具体实施方式
25.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型的实施方式作进一步地详细描述。
26.本实用新型提出了一种车载式路面缺陷检测系统。如图1所示,该系统包括图像采集模块1,定位模块2,与图像采集模块1相连接用于提取路面缺陷并判别其缺陷类型的嵌入式ai计算模块4,与定位模块2和嵌入式ai计算模块4相连接用于存储缺陷图像的工控机模块5,以及显示路面缺陷信息的显示模块8。
27.在一种实施方式中,车载式路面缺陷检测系统的图像采集模块1,选用高清运动相机采集公路路面图像信息,通过高清运动相机内的感光组件及控制组件对采集的图像信息进行实时处理,并将其转换成数字信号,借由实时流传输协议(real time streaming protocol, rtsp)通过以太网传输到嵌入式ai计算模块4中。高清运动相机通过电池供电,设置相机帧率f为60fps、分辨率为4096pixel
×
2160pixel,在完成摄像头的相关参数配置后即可正常工作。
28.在一种实施方式中,嵌入式ai计算模块选用nvidia开发的jetsonagxxavier,包含 8核cpu、32gb显存、深度学习加速器、千兆以太网口、通讯接口等,这些为车载式路面缺陷检测系统的运作和高效的检测提供了强有力的保障。嵌入式ai计算模块4的主要作用是接收指令、数据处理和发送指令,通过编程的方式向定位模块2、图像采集模块1 发送指令,控制定位模块2、图像采集模块1进行同步信息采集,再对接收的信息进行数据处理。
29.在一种实施方式中,定位模块2选用gps北斗定位模块,该模块采用skytra(斯卡特瑞克)公司的atk1218-bd北斗加gps双模定位模块,定位精度为2.5m,能够满足在汽车行驶速度为60km/h下5m定位要求。
30.在另一种实施方式中,定位模块2选用topgnss(世导通电子科技有限公司)公司开发的zed-f9p蓝牙差分gps北斗模块,内置gnss模块,无外部天线能够实现厘米级测量,同时满足车速120km/h下5m定位精度要求。
31.在一种实施方式中,工控机模块5选用东田工控开发的dtb-3049-h3110工控机,能够获取定位模块2采集的路面的经纬度位置信息和日期/时间信息,通过编程软件生成路面缺陷分布地图,并将工控机模块5接收的信息和处理后的结果发送到显示模块8进行同步显示。
32.在一种实施方式中,显示模块8选用斯波兰公司的便携式4k高清显示器,能够同步、同时显示目标检测结果、图像分割结果和路面缺陷分布地图。
33.如图1所示,在一种实施方式中,图像采集模块1中的大疆灵眸oaich高清运动相机采集到公路路面图像数据之后,通过以太网借由实时流传输协议(real time streamingprotocol,rtsp)传输到嵌入式ai计算模块4中,先经过视频解码、图像预处理后将数据发送至目标检测算法模块中检测路面缺陷,完成初步识别,获取到的检测结果通过透视变换还原真实图像信息,将原有拍摄的斜视图像矫正为垂直于路面拍摄的新视图像,将变换后的路面缺陷经过图像裁剪送入图像分割算法模块对各类路面缺陷实现像素级分类,最终将目标检测结果、图像分割结果经过工控机模块5发送至显示模块8进行显示。定位模块 2通过串口将采集到的缺陷路面的经纬度位置信息和日期/时间信息发送至工控机模块5,通过编程软件实时生成路面缺陷分布地图,并将其发送至显示模块8实时显示更新后的分布地图,即在地图上加载新检测出来的路面缺陷信息。
34.如图2所示,在一种实施方式中,在车体7后备箱上方固定大疆灵眸oaich高清运动摄像头,通过空心支架与摄像头相连接,摄像头的拍摄路面的角度可以通过空心支架上的角度调节旋钮进行角度调节。车体7内装有一个工作箱,箱体3放置于车体7后备箱内部,将定位模块2安装在车体7后备箱内部,天线置于车体7外,嵌入式ai计算模块4 和工控机模块5放置于箱体3内,箱体3内同时放置可为嵌入式ai计算模块4和工控机模块5供电的电源模块6。显示模块8位于箱体3外部,通过延长线安装在驾驶盘附近,副驾驶人员可以实时查看路面缺陷的检测结果,必要时,对相机镜头进行清理,显示模块 8也可由电源模块6供电或由车载电源直接供电,与其直接进行物理连接。定位模块2、工控机模块5与嵌入式ai计算模块4之间通过数据线进行物理连接,图像采集模块1与嵌入式ai计算模块4之间通过以太网连接,由嵌入式ai计算模块4处理图像采集模块1 采集的路面图像信息,工控机模块5处理嵌入式ai计算模块4传输的定位信息,通过人工编程的形式生成公路路面缺陷分布地图,最终的检测结果显示在显示模块8上。
35.本实用新型图像采集模块1采用大疆灵眸oaich高清运动相机采集路面缺陷图像,能够获取清晰度更高、拍摄范围更广的路面缺陷图像,有利于实现后期精准检测和效率检测;嵌入式ai计算模块4选用目标检测算法、图像分割算法检测路面缺陷,无需上传服务器进行二次识别,能够更快更准的检测路面缺陷;工控机模块5通过人工编程方式将定位模块2采集的位置信息、日期/时间信息和嵌入式ai计算模块4检测出的路面缺陷信息相结合,生成路面缺陷分布地图,能够直观展示每条车道路面的缺陷种类和位置详情,有利于后期路面养护、道路快速修复。
36.以上结合具体实施例描述了本实用新型实施例的技术原理。这些描述只是为了解释本实用新型实施例的原理,而不能以任何方式解释为对本实用新型实施例保护范围的限制。基于此处的解释,本领域的技术人员不需要付出创造性的劳动即可联想到本实用新型实施例的其它具体实施方式,这些方式都将落入本实用新型实施例的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1