一种钩舌智能检测设备的制作方法
1.本实用新型属于钩舌磨损检测技术领域,尤其涉及一种钩舌智能检测设备。
背景技术:
2.钩舌作为列车车钩中的重要部件,在列车安全运行中有着重要影响。当列车运行过程中,钩舌将频繁受到牵引力、压缩力以及冲击力作用,致使钩舌时常产生裂纹、磨耗等故障,直接影响到车辆的运行安全。列车运行过程中如果钩舌失效,容易造成列车分离、迫使车辆发生紧急制动、造成轮对擦伤等,严重时会造成车辆脱轨颠覆的重大事故。
3.如图6所示,然钩舌的外轮廓尺寸是钩舌的最基本指标,但钩舌的曲面结构复杂,测量难度高,现有测量技术为人工样板比对测量或三坐标测量机测量,人工样板检测效率低,尺寸检测精度不易控制,三坐标检测精度高,但不能满足现场的检测要求;且现场对于钩舌孔径的检测通常采用通用量规,检测不便,精度差,本领域技术人员亟待解决上述技术问题。
技术实现要素:
4.针对现有技术所存在的上述不足,本实用新型提供一种钩舌智能检测设备。
5.为实现上述目的,本实用新型提供了如下技术方案:
6.一种钩舌智能检测设备,包括检测平台、控制系统,所述检测平台上设置有钩舌定位机构、旋转机构、机器人、激光扫描仪、主控计算机,所述旋转机构安装在所述检测平台上,所述钩舌定位机构固定于旋转机构上,所述钩舌定位机构可沿旋转机构做匀速旋转运动,所述机器人安装在钩舌定位机构的一侧,所述激光扫描仪固定于所述机器人上,所述主控计算机远离机器人安装在钩舌定位机构的一侧,所述检测平台下方连接有检测工程车,所述控制系统通过电缆与旋转机构、机器人、激光扫描仪、主控计算机电性连接;
7.所述钩舌定位机构包括底板、支撑板、支撑柱,所述底板、支撑板之间通过支撑柱固连,所述支撑柱设置若干,且突出所述支撑板设置,钩舌蹲放在所述支撑板上。
8.进一步的,所述旋转机构设置为测量转台,所述测量转台包括台面、转台本体、转台控制器,所述转台本体连接有转台控制器,所述转台本体、转台控制器固定在检测平台下方检测工程车内,所述转台本体上安装有带若干螺纹孔的台面。
9.进一步的,所述底板上设置有若干沉头孔,所述底板与所述台面采用螺栓连接。
10.进一步的,所述机器人设置为六自由度协作机器人,所述机器人的工作范围为886.5mm。
11.进一步的,所述激光扫描仪为手持式纯蓝光激光3d扫描仪,所述激光扫描仪设置有两个ccd及激光发射器。
12.进一步的,所述主控计算机放置在托板上,所述托板下端连接有旋转支架,所述旋转支架远离托板的一端固定在所述检测平台上。
13.进一步的,所述钩舌定位机构采用钢结构框架组装而成,所述钢结构框架经抛丸
予处理。
14.进一步的,所述检测平台上设置有外部输入按钮。
15.有益效果:本实用新型操作员将工件吊装至扫描工装上,机械臂携带扫描仪自动化扫描,测量转台配合转动,自动化扫描完成,与数模对齐后,进行3d色差对比,直接显示余量及磨损量,形位公差检测展示距离、直径、同轴度、平行度等,数据自动导入测量软件进行处理并出具检测报告。
16.本实用新型能够实现铁路货车钩舌安全、稳定、高效的工业自动化现场检测和信息化管理,并为铁路货车钩舌的进一步维修创造必要条件。该检测设备的可靠性设计能够适应工业现场的恶劣环境,减轻工人的工作强度,降低误检率,提高安全性、稳定性和工作效率,为列车钩舌提供可靠高效的检测手段。
附图说明
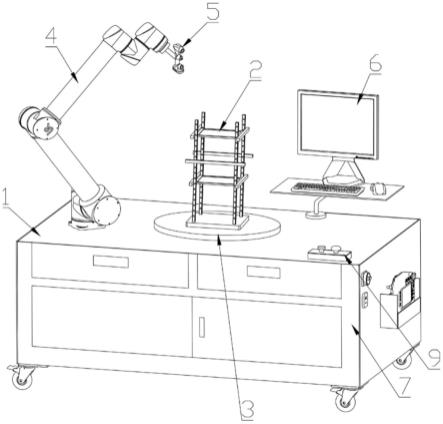
17.图1为本实用新型提供的一种钩舌智能检测设备的结构示意图;
18.图2为本实用新型所述钩舌定位机构的结构示意图;
19.图3为本实用新型所述旋转机构的结构示意图;
20.图4为本实用新型所述激光扫描仪的结构示意图;
21.图5为本实用新型所述旋转支架的结构示意图;
22.图6为本实用新型所述钩舌的主视图。
23.图中:1检测平台,2钩舌定位机构,201底板,202支撑板,203支撑柱,3旋转机构,301台面,302转台本体,303转台控制器,4机器人,5激光扫描仪,6主控计算机,7检测工程车,8旋转支架,9外部输入按钮。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.如图1-2所示,本实用新型提供一种钩舌智能检测设备,包括检测平台1、控制系统,所述检测平台1上设置有钩舌定位机构2、旋转机构3、机器人4、激光扫描仪5、主控计算机6,所述旋转机构3安装在所述检测平台1上,所述钩舌定位机构2固定于旋转机构3上,所述钩舌定位机构2可沿旋转机构3做匀速旋转运动,所述机器人4安装在钩舌定位机构2的一侧,所述激光扫描仪5固定于所述机器人4上,所述主控计算机6远离机器人4安装在钩舌定位机构2的一侧,所述检测平台1下方连接有检测工程车7,所述控制系统通过电缆与旋转机构3、机器人4、激光扫描仪5、主控计算机6电性连接;
26.所述钩舌定位机构2包括底板201、支撑板202、支撑柱203,所述底板201、支撑板202之间通过支撑柱203固连,构成钩舌定位机构2的框架结构,所述支撑柱203设置若干,且突出所述支撑板202设置,钩舌蹲放在所述支撑板202上。
27.在上述实施例的基础上,如图3所示,所述旋转机构3设置为测量转台,所述测量转台包括台面301、转台本体302、转台控制器303,所述转台本体302连接有转台控制器303,所
述转台本体302、转台控制器303固定在检测平台1下方检测工程车7内,所述转台本体302上安装有带若干螺纹孔的台面301。
28.在上述实施例的基础上,所述底板201上设置有若干沉头孔,所述底板201与所述台面301采用螺栓连接。
29.在上述实施例的基础上,所述机器人4设置为六自由度协作机器人,所述机器人4的工作范围为886.5mm。
30.在上述实施例的基础上,如图4所示,所述激光扫描仪5为手持式纯蓝光激光3d扫描仪,所述激光扫描仪5设置有两个ccd及激光发射器,扫描更清晰和精确,激光线全部采用蓝色激光,单条激光线具有深槽、孔的补扫功能,5条激光线用于超高精细扫描。
31.在上述实施例的基础上,如图5所示,所述主控计算机6放置在托板上,所述托板下端连接有旋转支架8,所述旋转支架8远离托板的一端固定在所述检测平台1上,操作员可通过旋转支架8任意调节主控计算机6的位置,方便查看检测数据。
32.在上述实施例的基础上,所述钩舌定位机构2采用钢结构框架组装而成,所述钢结构框架经抛丸予处理,达到sa2.5级标准。
33.在上述实施例的基础上,所述检测平台1上设置有外部输入按钮9,系统之间的位置确定好后,调试好扫描姿态和路径轨迹,所述外部输入按钮9一键开始对工件进行外部数据的扫描。
34.工作原理:
35.人工将钩舌工件吊装至支撑板202上,按下检测平台1上的外部输入按钮9,转台控制器303驱动台面301旋转带动钩舌定位机构2至检测位,六自由度协作机器人携带激光扫描仪5对钩舌工件进行面部及孔位扫描,旋转机构3配合激光扫描仪5对钩舌工件进行多面的扫描,主控计算机6对数据进行后处理,计算目标数据并与参考值比较生成检测报告,人工通过吊装上下料。
36.以上显示和描述了本实用新型的基本原理、主要特征及优点,文中使用的前、后、左、右非特指,主要为了更直观说明技术方案,不起限定作用。本行业的技术人员应该了解,上述实施方式只为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本实用新型的内容并加以实施,并不能以此限制本实用新型的保护范围,凡根据本实用新型精神实质所作的等效变化或修饰,都应涵盖在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1