一种柔性触觉传感器电极及柔性脉搏检测传感器电极的制作方法
1.本实用新型涉及传感器技术领域,尤其涉及一种柔性触觉传感器电极及柔性脉搏检测传感器电极。
背景技术:
2.机器人是自动控制机器(robot)的俗称,自动控制机器包括一切模拟人类行为或思想与模拟其他生物的机械(如机器狗,机器猫等)。在人形机器人中,由于需要模拟人手的各种操作,机械手的手指端会设置压力传感器,以便获知手指的实时压力。但这种的压力传感器都过于粗放,不能模拟人的触觉。在中医诊断中,号脉是重要的手段之一,中医都是通过人手来感知脉搏的情况,不能直观的展示出来,而且,通过人手来感知脉搏的情况很容易因为每个中医的个体不同而存在差异,容易出现不一样的诊断结论,准确度不足。
3.因此,现有技术存在缺陷,需要改进。
技术实现要素:
4.本实用新型要解决的技术问题是:提供一种柔性触觉传感器电极,能够应用到机器人的手指端,实现模拟人的触觉,为进一步提升机器人的整体功能提供基础。提供一种柔性脉搏检测传感器电极,检测脉搏的情况,方便对脉搏进行准确的检测,给诊断提供准确的信息。
5.本实用新型的技术方案如下:提供一种柔性触觉传感器电极,包括:柔性基材,附着在所述柔性基材上的子电极;所述子电极的数量不少于4个,所述子电极包括:第一导线、第二导线,分别与所述第一导线、第二导线连接的受力电阻图形,所述受力电阻图形为阵列排布;所述受力电阻图形的材料为直立石墨烯。所述受力电阻图形优选为涡旋形。所述第一导线、第二导线与所述受力电阻图形的材质相同。涡旋形的结构,能够包含更多的电阻图形,因此能够更容易受到力,以便准确获知受力情况。第一导线、第二导线与受力电阻图形的材质相同,方便第一导线、第二导线与受力电阻图形一同成型,减少工艺流程,节约成本。
6.将本方案产品贴在机器人的手指表面,然后将第一导线、第二导线接入电压。以3*3阵列为例,传感器上有3*3阵列的9个受力电阻图形(也即力学传感位点),每个力学传感位点都可以独立感知传感器的力学变化。机器人的手指触摸时,每个位点的受力是不同的,因此每个受力电阻图形产生的电阻也不同,流过受力电阻图形的电流也不同,根据9个力学传感位点流过的电流的不同,可以反推出在机器人手指表面哪个位置、受到了多大的力。由此延伸,也可以制作4*4、5*5、n*n阵列的传感器,阵列位点越多感应越精确。因此本方案能够精准的模拟人的触觉,能够进一步提升机器人的整体功能提供基础。
7.在本方案中,子电极的图形可以在附着有直立石墨烯膜层的柔性基材上通过激光雕刻、机械雕刻、化学蚀刻、等离子体蚀刻、光刻等技术将多余的直立石墨烯去掉,剩下的部分形成子电极。
8.进一步地,所述子电极还包括:与所述第一导线连接的第一接线盘、与所述第二导
线连接的第二接线盘,所述第一接线盘、第二接线盘设置在所述阵列排布的受力电阻图形的外侧。所述接线盘可以方便连接线缆,以便电压的接入。
9.进一步地,所述第一接线盘从第一导线的侧面延伸,所述第二接线盘从第二导线的侧面延伸。从侧面延伸,能够有效减少空间占用,方便容纳更多的子电极。
10.进一步地,当第一导线、第二导线设置在同一侧时,所述第一接线盘、第二接线盘相对。
11.进一步地,所述柔性基材的材质为pvdf、ps、pe、pdms中的任意一种。
12.本实用新型还提供一种柔性脉搏检测传感器电极,包括:柔性基材,附着在所述柔性基材上的子电极;所述子电极包括:第一导线、第二导线,分别与所述第一导线、第二导线连接的受力电阻图形;所述受力电阻图形的材料为直立石墨烯。所述受力电阻图形为涡旋形,所述第一导线、第二导线与所述受力电阻图形的材质相同。所述第一导线、第二导线设置在柔性基材不同的两端。应用时,将柔性基材贴在手腕处,将受力电阻图形紧贴脉搏处,电压接入第一导线、第二导线,由于脉搏的跳动会挤压受力电阻图形,从而造成受力电阻图形才行形变,而形变会导致受力电阻图形的电阻的改变,通过获知流过受力电阻图形上的电流的改变,从而获知其电阻的改变,继而可以获知脉搏跳动的情况。
13.采用上述方案,本实用新型提供一种柔性触觉传感器电极,将其贴在机器人的手指表面,然后将第一导线、第二导线接入电压。以3*3阵列为例,传感器上有3*3阵列的9个受力电阻图形(也即力学传感位点),每个力学传感位点都可以独立感知传感器的力学变化。机器人的手指触摸时,每个位点的受力是不同的,因此每个受力电阻图形产生的电阻也不同,根据9个力学传感位点电阻的不同,可以换算出在机器人手指表面哪个位置、受到了多大的力。因此本方案能够精准的模拟人的触觉,能够进一步提升机器人的整体功能提供基础。本实用新型还提供一种柔性脉搏检测传感器电极,应用时,将柔性基材贴在手腕处,将受力电阻图形紧贴脉搏处,电压接入第一导线、第二导线,由于脉搏的跳动会挤压受力电阻图形,从而造成受力电阻图形才行形变,而形变会导致受力电阻图形的电阻的改变,通过获知流过受力电阻图形上的电流的改变,从而获知其电阻的改变,继而可以获知脉搏跳动的情况。
附图说明
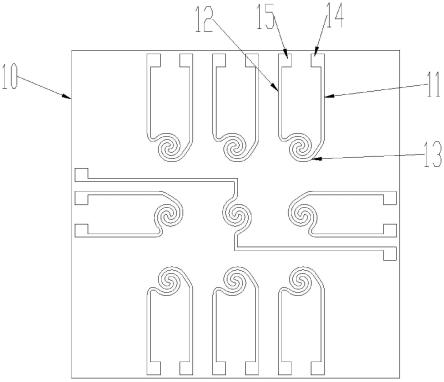
14.图1为本实用新型的一实施例结构示意图;
15.图2为本实用新型的另一实施例的结构示意图。
具体实施方式
16.以下结合附图和具体实施例,对本实用新型进行详细说明。
17.实施例1
18.请参阅图1,本实施例提供一种柔性触觉传感器电极,包括:柔性基材10,附着在所述柔性基材10上的子电极;在本实施例中,所述子电极的数量为9个,所述子电极包括:第一导线11、第二导线12,分别与所述第一导线11、第二导线12连接的受力电阻图形13,所述受力电阻图形13为阵列排布;所述受力电阻图形13的材料为直立石墨烯。所述受力电阻图形13优选为涡旋形。所述第一导线11、第二导线12与所述受力电阻图形13的材质相同。涡旋形
的结构,能够包含更多的电阻图形,因此能够更容易受到力,以便准确获知受力情况。第一导线11、第二导线12与受力电阻图形13的材质相同,方便第一导线11、第二导线12与受力电阻图形13一同成型,减少工艺流程,节约成本。在本实施例中,所述柔性基材10的材质为pdms。
19.将本方案产品贴在机器人的手指表面,然后将第一导线11、第二导线12接入电压。本实施例以3*3阵列为例,传感器上有3*3阵列的9个受力电阻图形13(也即力学传感位点),每个力学传感位点都可以独立感知传感器的力学变化。机器人的手指触摸时,每个位点的受力是不同的,因此每个受力电阻图形13产生的电阻也不同,也即流过受力电阻图形的电流也不同,根据9个力学传感位点流过的电流的不同,可以反推出在机器人手指表面哪个位置、受到了多大的力。因此本方案能够精准的模拟人的触觉,能够进一步提升机器人的整体功能提供基础。
20.在本实施例中,所述子电极还包括:与所述第一导线11连接的第一接线盘14、与所述第二导线12连接的第二接线盘15,所述第一接线盘14、第二接线盘15设置在所述阵列排布的受力电阻图形13的外侧。所述接线盘可以方便连接线缆。
21.在本实施例中,所述第一接线盘14从第一导线11的侧面延伸,所述第二接线盘15从第二导线12的侧面延伸。从侧面延伸,能够有效减少空间占用,方便容纳更多的子电极。当第一导线11、第二导线12设置在同一侧时,所述第一接线盘14、第二接线盘15相对。
22.实施例2
23.本实用新型还提供一种柔性脉搏检测传感器电极,包括:柔性基材10,附着在所述柔性基材10上的子电极;所述子电极包括:第一导线11、第二导线12,分别与所述第一导线11、第二导线12连接的受力电阻图形13;所述受力电阻图形13的材料为直立石墨烯。所述受力电阻图形13为涡旋形,所述第一导线11、第二导线12与所述受力电阻图形13的材质相同。所述第一导线11、第二导线12设置在柔性基材10不同的两端。应用时,将柔性基材10贴在手腕处,将受力电阻图形13紧贴脉搏处,电压接入第一导线11、第二导线12,由于脉搏的跳动会挤压受力电阻图形13,从而造成受力电阻图形13才行形变,而形变会导致受力电阻图形13的电阻的改变,通过获知流过受力电阻图形13上的电流的改变,从而获知其电阻的改变,继而可以获知脉搏跳动的情况。
24.综上所述,本实用新型提供一种柔性触觉传感器电极,将其贴在机器人的手指表面,然后将第一导线、第二导线接入电压。以3*3阵列为例,传感器上有3*3阵列的9个受力电阻图形(也即力学传感位点),每个力学传感位点都可以独立感知传感器的力学变化。机器人的手指触摸时,每个位点的受力是不同的,因此每个受力电阻图形产生的电阻也不同,根据9个力学传感位点电阻的不同,可以换算出在机器人手指表面哪个位置、受到了多大的力。因此本方案能够精准的模拟人的触觉,能够进一步提升机器人的整体功能提供基础。本实用新型还提供一种柔性脉搏检测传感器电极,应用时,将柔性基材贴在手腕处,将受力电阻图形紧贴脉搏处,电压接入第一导线、第二导线,由于脉搏的跳动会挤压受力电阻图形,从而造成受力电阻图形才行形变,而形变会导致受力电阻图形的电阻的改变,通过获知流过受力电阻图形上的电流的改变,从而获知其电阻的改变,继而可以获知脉搏跳动的情况。
25.以上仅为本实用新型的较佳实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保
护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1