双极板位置检测及精度调节装置的制作方法
本技术的实施例涉及一种检测及精度调节装置,特别涉及一种双极板位置检测及精度调节装置;应用于新能源氢燃料电池单电池的生产过程中,燃料电池单电池双极板位置检测及精度调节。
背景技术:
1、燃料电池单电池由双极板、双极板胶膜和膜电极组成,他们之间通过加热及压紧力被封装到一起。电堆的密封取决于双极板与膜电极直接的密封,如果双极板或膜电极装配时的误差比较大,就会造成电堆的泄漏,因此装配前需要对双极板及膜电极进行位置校准。现有结构采用接触机械式校准,通过可活动的夹紧定位块对极板的四个边进行定位。但是由于双极板材质为超薄金属板,其很难保证加工后的整体平面度,因此该定位机构存在,因极板翘曲引起的定位误差问题;另外此种结构因为定位过程种会伴随着产品和定位平台之间的摩擦,因此可能造成产品的损伤及脏污。
技术实现思路
1、本实用新型的实施方式的目的在于提供一种能够自动调节双极板位置,能够实现检测和精度调节。
2、为了实现上述目的,本实用新型的实施方式设计了一种双极板位置检测及精度调节装置,包括:
3、三轴调整机构,在所述的双极板位置检测及精度调节装置上设置所述的三轴调整机构;
4、平台安装支架,在所述的三轴调整机构的上方固定所述的平台安装支架;
5、真空装置,在所述的平台安装支架内安装所述的真空装置;
6、真空平台,在所述的平台安装支架上方设置所述的真空平台,所述的真空平台与所述的真空装置连接;
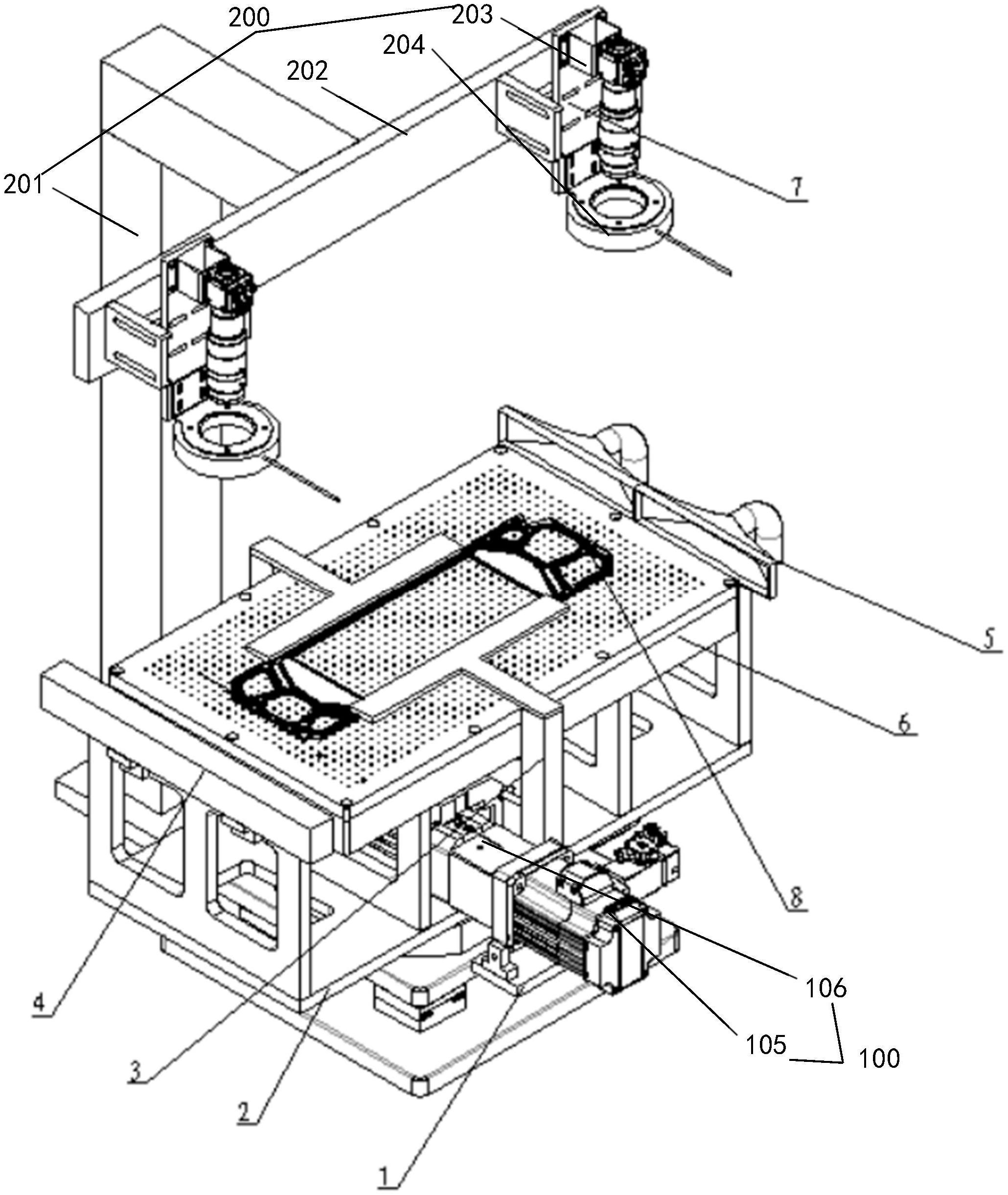
7、视觉检测系统,在所述的真空平台的上方设置所述的视觉检测系统;所述的视觉检测系统对所述的真空平台上的检测位置进行识别;
8、主控装置,所述的主控装置控制视觉系统识别出所述的检测位置和理论位置的偏差,对所述的检测位置在所述三轴调整机构方向上进行调整,使所述的检测位置和所述的理论位置重合。
9、进一步,在所述的真空平台的两侧固定所述的去离子装置和除尘器装置;所述的去离子装置沿着所述的真空平台的中心轴线平行设置;所述的去离子装置和所述的除尘器装置设置在同一平面上。
10、进一步,所述的三轴调整机构,还包括:
11、底板,在所述的三轴调整机构的底部固定所述的底板;
12、x/y十字导轨,在所述的底板上固定所述的x/y十字导轨;
13、台板,在所述的x/y十字导轨上活动所述的台板;
14、x轴模块,在所述的台板一侧设置所述的x轴模块;
15、y轴模块,在所述的台板另一侧设置所述的y轴模块
16、所述的x轴模块和所述的y轴模块驱动所述的台板沿着所述的x/y十字导轨进行x轴方向和y轴方向移动;
17、圆盘底座,在所述的台板上固定所述的圆盘底座;
18、旋转平台,在所述的旋转平台中间固定旋转轴;所述的旋转轴活动连接在所述的圆盘底座的中心;使得所述的旋转平台在所述的圆盘底座上旋转;
19、旋转轴模块,在所述的台板的侧面固定所述的旋转轴模块的底座;
20、滑槽,在所述的旋转平台的圆弧的侧面上开设一所述的滑槽;
21、横档,在所述的滑槽内活动插入所述的横档的一端;所述的横档的另一端固定在所述的旋转轴模块上;
22、腰型孔,在所述的旋转平台上开设所述的腰型孔;
23、定位销,在所述的腰型孔内,在所述的圆盘底座上插入所述定位销。
24、进一步,所述的x轴模块和所述的y轴模块的结构相同;所述的x轴模块驱动所述的台板沿着x轴方向移动;所述的y轴模块驱动所述的台板沿着y轴方向移动;所述的旋转轴模块驱动所述的旋转平台沿着z轴的旋转方向旋转。
25、进一步,所述的x轴模块,还包括:
26、x轴伺服电机,在所述的x轴模块的一端上设置所述的x轴伺服电机;在所述的x轴支架上;
27、x轴滚珠丝杆,在所述的x轴伺服电机的电机轴上通过连接器连接所述的x轴滚珠丝杆的一端;所述的x轴滚珠丝杆活动连接在所述的x轴支架上;
28、x轴活动连接块,在所述的x轴滚珠丝杆活动连接所述的x轴活动连接块;所述的x轴活动连接块固定在台板的底部。
29、进一步,所述的y轴模块,还包括:
30、y轴伺服电机,在所述的y轴模块的一端上设置所述的y轴伺服电机;在所述的y轴支架上;
31、y轴滚珠丝杆,在所述的y轴伺服电机的电机轴上通过连接器连接所述的y轴滚珠丝杆的一端;所述的y轴滚珠丝杆活动连接在所述的y轴支架上;
32、y轴活动连接块,在所述的y轴滚珠丝杆活动连接所述的y轴活动连接块;所述的y轴活动连接块固定在台板的底部。
33、进一步,所述的旋转轴模块,还包括:
34、旋转轴伺服电机,在所述的旋转轴模块的一端上设置所述的旋转轴伺服电机;在所述的旋转轴支架上;
35、旋转轴滚珠丝杆,在所述的旋转轴伺服电机的电机轴上通过连接器连接所述的旋转轴滚珠丝杆的一端;所述的旋转轴滚珠丝杆活动连接在所述的旋转轴支架上;
36、旋转轴活动连接块,在所述的旋转轴滚珠丝杆活动连接所述的旋转轴活动连接块;所述的旋转轴活动连接块固定在横档的下面。
37、进一步,所述的真空装置,还包括:
38、真空泵电机,在所述的真空装置的一端上设置真空泵电机;
39、真空泵,在所述的真空泵电机的输出端上连接所述的真空泵;所述的真空泵的真空腔通过软管与所述的真空平台的下端连接;
40、同时,所述的真空腔与所述的除尘器装置连接。
41、进一步,所述的视觉检测系,还包括:
42、立柱,在所述的三轴调整机构的底板的一侧固定所述的立柱的一端;
43、支架,在所述的立柱上固定所述的支架;
44、相机,在所述的支架的两侧固定所述的相机;
45、光源,在所述的相机的下方固定所述的光源。
46、进一步,所述的主控装置,还包括:
47、工控机,在所述的主控装置中设置所述的工控机;
48、plc,所述的工控机与所述的plc通讯连接;
49、所述的plc与相机通讯连接;所述的plc与光源通讯连接;
50、所述的plc与x轴伺服电机和y轴伺服电机和旋转轴伺服电机电气连接;
51、所述的plc与真空泵电机、去离子装置和除尘器装置分别继电回路连接。
52、本实用新型的实施方式同现有技术相比,在双极板位置检测及精度调节装置上设置三轴调整机构;在三轴调整机构的上方固定平台安装支架;在平台安装支架内安装真空装置;在平台安装支架上方设置真空平台,真空平台与真空装置连接;在真空平台的上方设置视觉检测系统;视觉检测系统对真空平台上的检测位置进行识别;主控装置控制视觉系统识别出检测位置和理论位置的偏差,对检测位置在三轴调整机构方向上进行调整,使检测位置和理论位置重合。解决了现有结构采用接触机械式校准,很难保证双极板加工后的整体平面度,解决了现有技术中的定位机构因双极板翘曲引起的定位误差的技术问题;解决了现有技术中的因为定位过程种会伴随着产品和定位平台之间的摩擦,因此可能造成产品的损伤及脏污的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!