用于为至少半自主操作的机动车辆生成可驾驶区域的方法、计算机程序产品、计算机可读存储介质和电子计算装置与流程
本发明涉及一种用于为至少半自主或完全自主操作的机动车辆可驾驶的区域生成可驾驶区域的方法。此外,本发明涉及一种至少半自主操作的机动车辆在至少半自主驾驶区域内的至少半自主操作的方法、计算机程序产品、计算机可读存储介质以及电子计算装置。
背景技术:
1、用于至少半自主操作的机动车辆或用于完全自主操作的机动车辆的可驾驶区域是现有技术中已知的。为此目的,例如指定基于可驾驶区域内的对象生成的可驾驶区域。这些区域通常被指定为这些对象周围的多边形。特别地,可驾驶区域的边界因此通过相应的多边形来指定,然后机动车辆可以在该多边形中移动。
2、de 10 2011 082 478 a1公开了借助于简单的2d视频系统,检测与参考系统内预定的、固定附接的标记相关的相对位置,并且关于距离和视角研究标记的图像。如果参考系统内标记的位置已知,则可以实现车辆的自定位。
技术实现思路
1、本发明的目的是提供一种方法、计算机程序产品、计算机可读存储介质和电子计算装置,通过它们可以为至少半自主操作的机动车辆高效地生成可驾驶区域。
2、该目的通过根据独立专利权利要求的方法、计算机程序产品、计算机可读存储介质和电子计算装置来实现。有利的实施例在从属权利要求中详细说明。
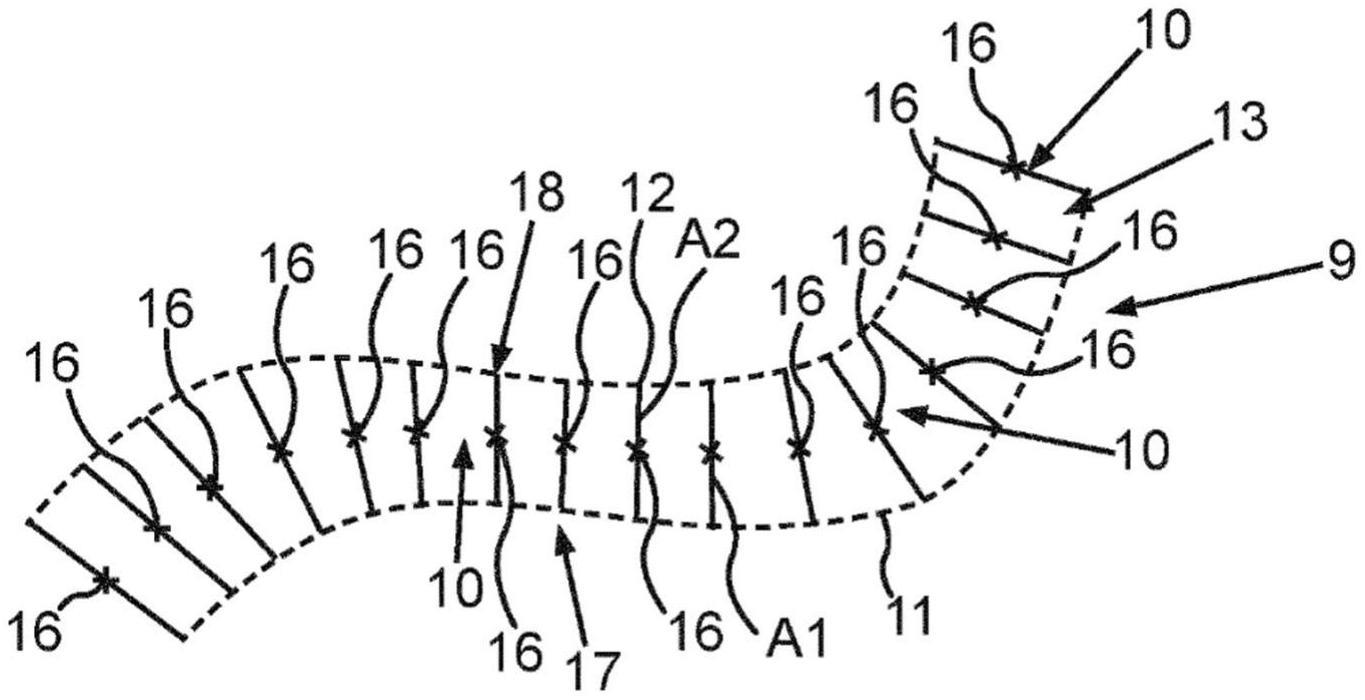
3、本发明的一个方面涉及一种为至少半自主或完全自主操作的机动车辆可驾驶的区域生成可驾驶区域的方法。由轨迹点序列形成的可驾驶轨迹被指定。为潜在可用的驾驶管路指定第一边界,该第一边界被形成为第一边界点序列,该第一边界具有距可驾驶轨迹的第一横向距离并且形成在可驾驶轨迹的第一侧上。为潜在可用的驾驶管指定第二边界,该第二边界形成为第二边界点序列,该第二边界具有距可驾驶轨迹的第二横向距离并且形成在可驾驶轨迹的与第一侧相对的第二侧上。具有可驾驶轨迹、具有第一边界以及具有第二边界的可驾驶区域被生成为潜在可用的驾驶管。
4、因此可以以资源节约且特别有效的方式生成机动车辆的可驾驶区域。特别地,例如,为此目的,例如停车场形式的可驾驶区域可以包括电子计算装置,该电子计算装置被设计用于产生可驾驶区域,特别是用于产生潜在可用的驾驶管路。具体地,生成电子地图作为可驾驶区域。因此,特别针对可驾驶区域生成电子地图。然后指定可驾驶轨迹,在此特别是通过可驾驶轨迹的测定或计算或确定来提供该可驾驶轨迹。电子地图尤其应被理解为数字环境地图,借助该电子地图机动车辆可以至少半自主地导航。数字环境地图在此特别包括关于对象的环境信息,例如环境中的房屋和/或墙壁以及道路或轨道或机动车辆的其他可行驶的底面。
5、特别地,该方法可用于在没有卫星辅助导航(如全球定位系统导航)的情况下穿越可驾驶区域。例如,如果在可驾驶区域中无法接收到相应的gps信号,则这是特别有利的。
6、然后,可驾驶轨迹可以将指定为曲线。此外,第一边界和/或第二边界也可以被指定为相应的曲线。此外可以规定,可驾驶轨迹根据在机动车辆的主行驶方向上观察到的车辆中心来确定。
7、具体地,所提出的发明因此克服了以下问题:根据现有技术的边界或多边形通常很大并且不包括进一步的信息,使得例如机动车辆可能难以决定其是否位于这些边界的正确一侧。通过指定可驾驶轨迹、第一边界和第二边界,就可以生成可驾驶的驾驶管路,使得机动车辆接收关于机动车辆在可驾驶区域内的哪一侧移动或是否正确移动的信息。
8、特别地,可驾驶区域,特别是作为可驾驶区域的电子地图,包括轨迹,因此被传输到机动车辆,其中在这种情况下,提出了一种高效的方法,其需要很少的存储器和计算资源,特别是在车辆一侧。提出了待传输至机动车辆的可驾驶区域的电子地图或另一种地图格式,其尤其仅包括表示机动车辆的理论轨迹的第一曲线或第一点序列、表示轨迹一侧的可驾驶区域的边界的第二曲线或第二点序列,以及表示轨迹另一侧的可驾驶区域的进一步边界的第三曲线或第三点序列。
9、机动车辆尤其包括相应的辅助系统,通过该辅助系统可以实现至少半自主操作、尤其是完全自主操作。为此目的,辅助系统例如可以干预机动车辆的纵向加速装置和/或横向加速装置,以便能够实现机动车辆的至少半自主操作或完全自主操作。
10、根据一种有利的实施方式,可驾驶区域从车辆外部装置传输至至少半自主或完全自主操作的机动车辆。车辆外部装置在此尤其可以对应于电子计算装置。例如,可驾驶区域可以包括用于此目的的电子计算装置,并且电子地图可以例如在进入可驾驶区域时被传输至机动车辆。因此,在进入可驾驶区域时,机动车辆可以在可驾驶区域内至少半自主地、特别是完全自主地行驶。
11、在另一有利实施例中,将第一边界点序列的一个边界点(特别是仅一个边界点)和第二边界点序列的一个边界点(特别是仅一个边界点)分配给轨迹点序列的每个轨迹点。因此,可以以简单且资源减少的方式生成潜在可用的驾驶管路并将其传输至机动车辆。因此,机动车辆在可驾驶区域内的导航可以以资源节约的方式并且用很少的计算能力来实现。
12、此外,已经证明有利的是,轨迹点和分配给该轨迹点的边界点(特别是在轨迹的直线部分上)位于垂直于行驶方向延伸的线上。这样可以可靠地生成机动车辆可以在其中移动的驾驶管路。特别地,相应的指定边界点的生成因此节省了大量的计算能力,因为需要很少的计算工作来产生垂直于行驶方向的相应边界点。
13、在另一有利实施例中,为设计为停车区域的可驾驶区域提供电子地图。例如,停车区域可以是具有所谓代客泊车的停车区域。在代客泊车中,可以特别规定,机动车辆的乘员或使用者例如在停车区域的入口区域处移交机动车辆,然后机动车辆自主地停放在停车区域内。这对于用户来说尤其省时且方便。然后机动车辆可以又在停车区域内自主行驶。为此,机动车辆例如可以相应地具有slam算法(自定位和建图),从而使得机动车辆在停车区域内的自定位成为可能。
14、此外,已经证明有利的是,为设计为有顶停车场的可驾驶区域提供电子地图。特别是在停车库中,机动车辆通常不存在gps信号。基于电子地图或者基于可驾驶区域内的潜在可用的驾驶管路,现在可以通过机动车辆的自定位可靠地驶出有顶停车场。为此目的,例如可以规定,停车场在该停车场的墙壁上具有相应的地标或代码,例如基于该地标或代码,机动车辆通过检测这些地标或代码来将其自身定位在有顶停车场内。因此可以实现机动车辆在有顶停车场内的改进的、至少半自主或完全自主的驾驶。
15、此外,已经证明,有利的是第一边界被指定在距可驾驶轨迹在1.25m和1.75m之间的第一横向距离范围处。第一边界的恒定距离特别是在可驾驶轨迹的直线部分中被指定,特别是在可驾驶轨迹的至少基本上直线部分中被指定。
16、具体地,沿轨迹的至少40%、或50%、或60%、或70%、或80%、或90%、或100%,可驾驶轨迹与第一边界和第二边界之间的距离可以在指定范围内。特别地,相应的机动车辆外部尺寸也可以考虑在内。然后,机动车辆可以在该区域内自由移动并且例如自由地躲避物体或事物。由此可以实现机动车辆在可驾驶区域内的有针对性的引导,以及机动车辆相对于潜在可用的驾驶管路中的物体的躲避。
17、也有利的是,第二边界被指定在距可驾驶轨迹2m至2.75m之间的第二横向距离范围内。第一边界的恒定距离特别是在可驾驶轨迹的直线部分中被指定,特别是在可驾驶轨迹的至少基本上直线部分中被指定。
18、同样有利的是,可驾驶轨迹和/或第一边界和/或第二边界根据机动车辆的指定尺寸来确定。例如,可以将机动车辆的标准尺寸指定为指定尺寸。在此例如可以使用两个、特别是使用四个圆圈来描述机动车辆。然后,实际上可以通过这两个、特别是四个圆圈来生成机动车辆,进而根据其生成潜在可用的驾驶管路。特别地,例如,可驾驶轨迹可以被指定为在标准机动车辆的主行驶方向上观察到的车辆中心的函数。因此可以为大量机动车辆生成电子地图。例如,机动车辆的标准尺寸可以基于大量机动车辆的平均来指定。然而,例如,也可以假设“最坏情况”的尺寸,例如可以使用在可驾驶区域中机动车辆的最大尺寸,并且可以在此基础上确定驾驶管路作为标准尺寸,使得可以为所有可能的机动车辆实现可驾驶区域内的安全导航。
19、同样有利的是,可驾驶轨迹和/或第一边界和/或第二边界根据机动车辆的特定尺寸来确定。特别地,这样机动车辆的特定于车辆的尺寸规格可以被考虑在内。因此可以实现特定机动车辆在可驾驶区域内的更安全的操作。
20、此外,已经证明有利的是,在机动车辆进入可驾驶区域时将特定尺寸从机动车辆传输到机动车辆外部的电子计算装置。例如,机动车辆可以通过通信装置将机动车辆的相应尺寸传输至可驾驶区域的电子计算装置。可驾驶区域或机动车辆外部的电子计算装置然后又根据这些传输的机动车辆的尺寸规格来确定可驾驶轨迹、第一边界和第二边界。由此产生的潜在可用的驾驶管路然后又从机动车辆外部的电子计算装置传输到机动车辆。
21、此外,已证明有利的是,在机动车辆进入可驾驶区域时借助可驾驶区域的检测装置来确定特定尺寸。特别地,可驾驶区域可以包括例如摄像机。此外,还可以使用诸如雷达传感器装置、超声波传感器装置或激光雷达传感器装置之类的其他传感器。然后,可驾驶区域可以通过检测装置确定机动车辆的尺寸。然后根据该检测到的尺寸在可驾驶区域的机动车辆外部电子计算装置内确定可驾驶轨迹、第一边界和第二边界。然后可以将潜在可用的驾驶管路传送至机动车辆。因此,能够以特定于机动车辆的方式生成潜在可用的驾驶管路。
22、此外,已经证明有利的是机动车辆在可驾驶区域中被定位。这可以通过可驾驶区域本身和机动车辆本身来执行。例如,机动车辆可以基于机动车辆中相应的检测装置进行自身定位。替代地或附加地,这还可以例如基于里程计数据来进行。此外,机动车辆的定位可以通过可驾驶区域中的摄像机或者通过其他传感器装置来执行。因此,机动车辆在可驾驶区域中的位置始终是已知的。
23、基于机动车辆的里程计数据在可驾驶区域中定位机动车辆也是有利的。特别地,例如,里程计数据可以与机动车辆的速度和方向盘角度相关。因此,机动车辆能够以简单的方式将其自身在可驾驶区域中定位。
24、此外,有利的是,机动车辆基于地标在可驾驶区域中定位。特别地,这些地标例如可以是代码。这些地标或代码然后可以通过摄像机或通过机动车辆的激光雷达传感器装置来检测。基于该检测,随后可以在可驾驶区域内、特别是在停车场内执行机动车辆的定位。
25、本发明还涉及一种至少半自主操作的机动车辆或至少完全自主操作的机动车辆在至少半自主驾驶区域内的至少半自主操作的方法。具有可驾驶轨迹的电子地图由机动车辆接收,其中可驾驶轨迹与第一边界和第二边界一起传输,所述第一边界和第二边界界定潜在可驾驶的驾驶管路。然后根据潜在可驾驶的驾驶管路来确定机动车辆的单独行驶轨迹。特别地,因此可以提出停车场中的半自动驾驶。例如,停车场可以设计为代客泊车。特别地,机动车基于一定数量的轨迹点和边界点规划单独的轨迹。
26、此外,已经证明有利的是,潜在可驾驶的驾驶管路中的物体被驾驶管路内的机动车辆自主地避开。例如,如果在驾驶管路内检测到物体,则机动车辆可以独立地避开它。因此,机动车辆在可驾驶的驾驶管路内规划躲避轨迹。
27、根据另一有利实施例,如果在第一边界和第二边界内不可能进行驾驶操作,则由机动车辆执行可能驶过第一边界和/或第二边界的驾驶。特别是,这种潜在的驶过行为受到监控。特别地,可以对周围环境进行额外检测,并且可以检查例如在驶过第一边界和/或第二边界时机动车辆在这些边界之外是否也可以安全行驶。因此,例如在针对物体进行躲避时,能够在可行驶区域可驾驶区域内可靠地进行躲避并进行自主导航。特别地,在躲避之后,机动车辆能够再次在驾驶管路中至少半自主地操纵。
28、所提出的方法特别是计算机实现的方法。为此目的,特别提供了一种具有程序代码装置的计算机程序产品,当程序代码装置在电子计算装置上被处理时,可促使该电子计算装置执行根据前述方面的方法。为此目的,本发明的另一方面涉及一种具有计算机程序产品的计算机可读存储介质。
29、本发明的又一方面涉及一种被设计成执行根据前述方面的方法的电子计算装置。具体地,该方法通过电子计算装置来执行。为此目的,电子计算装置特别包括电路、特别是集成电路、处理器以及能够执行相应方法的另外的电子部件。在此,电子计算装置可以设置在机动车辆内部和/或设置在机动车辆外部。特别地,由此可以提供一种由可驾驶区域和机动车辆组成的系统,该系统例如使用相应的电子计算装置至少部分地彼此通信。
30、该方法的有利实施例应被视为计算机程序产品、计算机可读存储介质和电子计算装置的有利实施例。电子计算装置和机动车辆具有用于该目的的具体特征,这些特征使得能够执行该方法或其有利的实施例。
31、本发明的进一步特征由权利要求、附图和附图的描述得出。在上面的描述中引用的特征和特征的组合以及在下面的附图的描述中引用的和/或单独在附图中示出的特征和特征的组合不仅可以在各自指明的组合中使用,也可以以其他组合使用而不脱离本发明的范围。因此,本发明还旨在被认为包括和公开了未在附图中明确示出和解释的实施例,但是这些实施例可以通过特征的单独组合的方式从所解释的实施例产生和生成。因此不具有最初提出的独立权利要求的所有特征的实施例和特征的组合也应被视为已公开。超出或不同于权利要求的反向引用中阐述的特征组合的实施例和特征组合还应当被认为是公开的,特别是通过上述实施例来公开。
- 还没有人留言评论。精彩留言会获得点赞!