光学测量设备和方法与流程
本技术要求2021年6月18日的德国首次申请de 10 2021 115 827.3的优先权,其所有公开内容通过参引结合于此。本发明涉及一种光学测量设备和一种用于测量物体的方法。
背景技术:
1、在特别是在机动车领域中的距离测量方面,如今,除了雷达系统之外,也使用lidar(激光雷达)系统。“lidar代表light detektion and ranging(光探测和测距)”并且涉及借助于光束、尤其激光束来探测和检测距物体的距离和在一些应用中也探测和检测相对于物体的速度的方法。一种可能的途径在此在于,发出连续的激光束,其光频率被周期性调制。在此,频率在特定的时间段内上升并且然后再次下降,其中上升和/或下降被称为啁啾(chirp)。通过检测在这种啁啾期间放射的激光束的由物体反射的份额,可以借助于光学多普勒效应来检测距离以及相对速度。
2、然而在此,不同情形需要记录可能也借助不同参数的多次测量,以便能够区分可能的情形。例如,借助连续的、其频率变化的光的单次测量不允许检测要以其相对速度运动的物体。为此,需要具有不同频率或不同斜率的第二测量。
3、因此,不同情形需要多次测量,使得用于产生高分辨率的三维图像的大量测量需要长的且不再可接受的时间。例如,如果系统应当覆盖200m的有效范围,则用于二倍传播路径的时间约为1.3μs。在积分时间为0.7μs时,为此得出啁啾所需的约为2μs的持续时间,从而得出3×2μs的最小测量时长。后者从以下实际情况得出,即通常需要多次测量,以便一一对应地检测相对运动并且在多个物体的情况下可以进行关联。如果应当每30ms拍摄一张新的图像,系统借此最多可以覆盖5000个点,以便产生这种图像。然而,刚好在机动车应用的领域中对相机的典型要求需要明显更高的图像分辨率,使得借助这种系统无法容易地实现所述要求。
4、尽管通过多个这种lidar系统和这样产生的具有低分辨率的图像的随后的合成的组合可以实现更高的分辨率,但是在高分辨率的总图像的情况下耗费和为此所需的硬件会大幅增加。
5、因此,存在如下需求,提出用于测量物体的改进的光学测量设备以及方法,借助其可以在相同的时间段内实现更高的分辨率。
技术实现思路
1、所述目的借助独立权利要求的主题来实现。在此,改进方案和设计方式是从属权利要求的主题。
2、为了改进这种lidar系统,发明人现在提出,除了频率调制之外,在同一系统中还集成幅度调制。在此,所需的幅度调制不仅可以通过激光设备本身进行,而且可以通过下游连接的调制器进行。在同时的频率和幅度调制的情况下,能够与在纯频率调制的系统中类似地进行探测,使得由于物体的反射,在频域中评估时除了通过频率调制引起的差频以外,也得出幅度调制频率。因此,从该份额的相位中和通过对这些信息的适当的评估能够借助于单次测量不仅确定物体的距离、而且确定其与提出的光学测量设备的相对速度。尤其,可以从复数傅里叶变换中借助于实部或虚部来计算幅度调制的光的探测到的反射份额的相并且从中又计算传播路径(laufweg)。由于频率低,光信号的幅度调制的份额中的多普勒效应的影响是可忽略的。
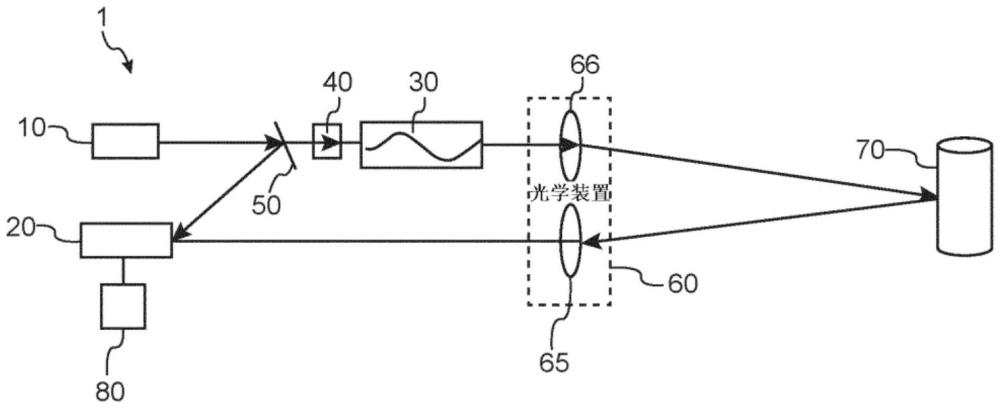
3、在所提出的原理的一个方面中,提供一种光学测量设备,尤其用于机动车的光学测量设备。所述光学测量设备包括激光设备,所述激光设备构成用于产生其频率可调制的单模激光束。此外,设有可控制的光学调制器,其用于对由激光设备产生的频率调制的单模激光束进行可设定的幅度调制。测量设备还包括探测器设备,用于接收由激光设备产生的频率调制的单模激光束的一部分以及由物体反射的且幅度调制以及频率调制的单模激光束的一部分。探测器设备构成为将接收到的信号叠加,从而引起到较低的中频的频率转换。就此而言,探测器设备如混频器那样作用,其中由激光设备产生的频率调制的单模激光束份额用作为本机振荡器信号。所得出的混合信号具有能够表现为差频的频率。
4、最后,光学测量设备包括评估电路,其构成用于将由探测器设备叠加的信号传递到频域中并且随后确定物体的距离和速度,所述物体将单模激光束至少部分地向回反射到探测器中。
5、以这种方式实现一种光学测量设备,其使用激光束的幅度调制的份额和频率调制的份额,以便从激光束的反射的部分获得关于物体的距离以及相对速度的信息。由此,与传统的系统相比,测量时长显著降低。通过附加的幅度调制尤其补充了即使在近距离内也可靠的且快速的距离测量,使得可以将基于纯频率调制的系统的光学测量设备的在那的弱点组合。
6、所提出的组合是成本适宜的并且可借助仅小的额外空间需求来实现。另一优点是,刚好在将光学测量设备应用在机动车中时,仅相对速度的限定的范围是实际的。从中得出相当小的所产生的多普勒频移,使得评估频率调制和幅度调制的组合的测量系统由于同时使用两种常见的测量方法本身可以检查其自身的功能进而能够以有限的程度自己探测误差。
7、对于本技术的目的,机动车表示借助于驱动器前进的运送机构。这尤其包括用于道路交通的所有机动车,然而也包括用于轨道交通和尤其航空交通的车辆。在此处也提及,本发明不限于机动车,而是也可以在其他应用中使用,例如可在静态雷达测量中用于速度检测。
8、在一个方面中,可控制的光学调制器包括可控制的电光学调制器。其尤其可以由基于合适材料的透射或吸收性能的调制的组形成。为此例如,提出基于弗朗兹-凯尔迪什效应或量子限制斯塔克效应工作的电光学调制器。替选地,可控制的光学调制器也可以具有马赫-泽恩德调制器。
9、一些方面附加地涉及在可控制的光学调制器上游连接的光学隔离器。这种光学隔离器用于在幅度调制接通时抑制单模激光束的份额反馈到激光设备中。由此防止,通过可控制的光学调制器的工作方式将光份额向回反射到激光设备中并且在那造成发出的激光功率的改变。在另一方面中,此外可以设有分束器,所述分束器设置在激光设备和可控制的光学调制器之间的光路中,并且构成为将由激光设备产生的频率调制的单模射束的一部分转向到探测器设备上。在此,由激光设备产生的频率调制的单模射束的这部分用作为所谓的本机振荡器信号,用于与探测到的由物体反射的光份额的频率转换。在该上下文中可以提出,探测器设备包括滤波器,其尤其对于在激光之外的频率,包括提出的频率调制,是基本上不透光的。由此,在一些实现方案中能够改进探测器设备的敏感度。
10、在另一方面中,光学测量设备还包括光学装置,其在光路中连接在可控制的光学调制器下游。光学装置构成为检测频率调制和幅度调制的单模激光束的由物体反射的光,并且将其转向到探测器设备上。在一个方面中,为此光学装置包括一个或多个透镜或镜系统,其一方面将来自调制器的光向外发出并且另一方面将由物体反射的份额转向到探测器设备上。光学装置可以包括可运动的镜,例如mems镜,使得借此可实现光学测量设备的扫描功能。在此,光学装置的镜设计为,使得其可以可操控地以特定角度旋转或位移,使得光学测量设备由此可以执行在预设的角度范围内的扫描或采样。
11、提出的原理的另一方面涉及激光设备和产生的单模激光束的相干长度。所述相干长度在此选择为,使得其至少对应于要测量的距离的二倍,使得通过频率调制在探测在最大距离内的物体时保持相干性。为了控制、检验和校准频率调制的线性能够使用具有本机振荡器的另一元件。其可以经由延迟段对应地操控激光设备,以便由此产生频率调制的激光。
12、在另一方面中提出,幅度调制经由正弦幅度调制信号进行。在该上下文中,幅度调制信号是调制器加载以引起激光的幅度的调制的信号。幅度调制频率是对幅度进行调制的频率,调制深度或冲程说明在幅度调制频率的周期期间的最小幅度和最大幅度之间的差。
13、借此,幅度随着幅度调制频率正弦形地变化,所述幅度调制频率在频谱中在随后的评估中通过单个频率(在理想情况下)可见。然而,根据规定也能够实现其他调制类型,例如调制信号的矩形的设计方案或三角形或锯齿形的设计方案。
14、在根据所提出的原理的频率调制的测量中的问题是要发出的激光的所需的连续性。对应地提出,可控制的光学调制器虽然产生幅度调制,但是幅度调制冲程仅在2%至60%的范围内、和尤其在5%至30%的范围内构成。由此,在幅度调制期间也仍有足够的光可以从反射的物体到达探测器中并且在那里被适当地评估。
15、此外,幅度调制冲程应当选择为,使得在频率转换之后通过随后的评估电路仍还能够探测和有意义地评估所述幅度调制冲程。在5%的范围中、例如在2%至10%的范围中的调制深度已被证实为是特别有效的,并且同时允许继续连续的放射,用于真正的频率调制的距离测量。
16、在一个方面中,由激光设备产生的、频率调制的单模激光束的部分的强度高于由物体反射的并且由探测器检测到的幅度调制和频率调制的激光束的最大幅度。由此在探测器装置中实现用作为振荡器信号的光的足够的强度,从而引起线性的转换和混合。因此,避免尤其在强度小于所接收的反射的信号的最大幅度时会出现的不干净的频谱。
17、在另一方面中,评估电路构成用于由探测器设备叠加的信号的复数傅里叶变换。这是适宜的,因为关于光传播时间的信息在反射的光的相中获得,使得能够从所述相、尤其幅度调制的份额的相的实部或虚部中确定距物体的距离。同时,借助于傅里叶变换也获得关于频率调制的份额的信息,更确切地说取决于传播时间的频移。在静止物体或彼此间没有相对运动的情况下,这两个份额应当是相同的,使得由此一方面可识别准确的距离确定,另一方面然而也可识别在检测或评估中的可能的误差探测。在附加的相对运动的情况下,取决于传播时间的频移此外是多普勒频移的,使得借助出自幅值调制的份额的评估的共同的信息不仅可以确定距离、而且可以确定相对速度。借此可行的是,在激光设备的单个频率调制、即单个啁啾的时长期间不仅确定距离、而且确定相对速度。
18、在另一方面中,可控制的光学调制器的幅度调制的频率选择为,使得所述频率大于差频。差频从在一个时间点由探测器装置接收的并且由物体反射的幅度调制和频率调制的激光束的频率以及在该时间点的由激光设备产生的纯频率调制的激光束的在探测器设备中接收的部分中得出。换言之,用于幅度调制的频率大于差频,所述差频在借助于发出的光的相位和频率调制的基于距物体的距离的评估中得出。在一个方面中,频率调制在此可以位于几百khz至几兆赫兹的范围内。
19、在这种情况下,可控制的光学调制器的幅度调制大于上述差频,所述差频作为确定频率调制的反射的信号的结果得出。在一些示例中,幅度调制可以大于100khz并且也可以大于1mhz。在另一方面中,频率调制的过程的时长大于最大预设的路程段的光传播时间的二倍。由此保证,频率调制是完整的。啁啾的时长还可以选择成,使得其例如刚好为最大预定的路程段的光传播时间的二倍或四倍。
20、另一方面涉及适合覆盖在一个或多个物体的距离测量中的特殊情况的不同的实现方案。这些方面基于以下事实:通过不仅频率调制的份额、而且幅度调制的份额的频率叠加得出以下可能性,即相应的结果彼此非常接近从而通过傅里叶变换不再能足够好地分开地分辨,或者在其之间进行区分变得困难。然而,在如上所述的较大的幅度调制频率下,探测到的光的相移在较小的距离处也已经变得大于2π,即超过360°,使得基于相位的一一对应的距离测量是不可行的。为了应对所述问题,在一些方面中提出,可控制的光学调制器构成为,使得幅度调制的频率在频率调制的过程的时长期间改变。例如,幅度调制的频率可以在频率调制的持续时间的大约一半之后,即在啁啾的一半之后改变。通过这两个不同的幅度调制频率,现在解决在长距离的情况下的不一一对应的上述问题。
21、在该上下文中适宜的是,评估电路设计成,使得所述评估电路在幅度调制的频率的时长期间执行第一傅里叶变换,并且在幅度调制的改变的频率的时长期间执行对应的第二傅里叶变换。基于这两个傅里叶变换,现在可以求取物体距测量设备的距离和相对速度。
22、然而,通过这里提出的光学测量设备,尤其具有基于傅里叶变换工作的评估电路的光学测量设备,也可行的是,可控制的光学调制器的操控构成用于由激光设备产生的频率调制的激光束的幅度调制,使得幅度调制的频率由第一调制信号和与其至少在频率方面不同的第二调制信号组成。因此换言之,幅度调制通过可操控的调制器进行,使得射入的激光束的幅度不仅随着幅度调制频率、而且随着两个或更多个这种幅度调制频率的叠加改变。所述附加的调制信号和调制频率叠加并且可以在评估电路中通过在频率范围内的傅里叶变化再次分辨。
23、对应地,可以单独地确定相,从而可以类似于两个时间上彼此跟随的测量推断出实际距离。此外,所述方面具有的优点是,对于由频率调制的份额求取差频可以使用发出的激光束的整个啁啾。
24、发明人还提出一种用于测量物体并且确定它们的距离和相对速度的改进的方法,所述方法利用这里提出的原理。在第一步骤中,这包括产生频率调制的激光束,尤其单模激光束。接着,频率调制的激光束的一小部分耦合输出。频率调制的激光束的剩余的、明显更大的份额借助幅度调制信号来调制其幅度进而其强度。这样频率调制和幅度调制的激光束被放射,可能由物体反射。频率调制和幅度调制的激光束的份额以及频率调制的激光束的先前部分被接收并且叠加在一起。由此构成差拍(schwebung),所述差拍的频率由激光束的这部分的频率调制的份额和激光束的向回反射的份额之间的差得出。
25、检测差拍并且随后如已经在上文阐述的那样以不同的方式评估。为此,例如,在一个方面中,可以将复数傅里叶变换应用于检测到的信号。接着,评估在对应于幅度调制信号的幅度调制频率的频率处的份额的相位。
26、在另一方面中,由检测到的信号产生复数傅里叶变换。所述复数傅里叶变换包括基本上对应于差拍的频率的第一频率分量和基本上对应于幅度调制信号的幅度调制频率的至少一个第二频率分量。然后,对傅里叶变换的结果进行进一步评估,其方式为:由具有第二频率分量的信号的相位计算距离。替选地或附加地,也可以由具有第一频率分量的信号计算距离。例如,这种计算的结果可以用于进行可信度检查、估计天气和气候状况,以便执行内部的误差分析等。
27、同样,在该上下文中,也可以基于具有第二频率分量的信号的相位,由具有第一频率分量的信号计算相对速度。所述方法的优点是,与纯频率调制的方法相比,只需一次测量,以便确定距离和相对速度。在此,在一些方面中,幅度调制频率选择成,使得其大于第一频率分量的可能的最大预期的值。那么该方面是尤其适宜的,以便在傅里叶变换之后获得频谱中的各个分量的更好的分离。
28、另一方面涉及频率调制的类型。在一个方面中,频率调制的激光束的调制频率在持续时间期间从第一频率值上升到第二频率值,尤其线性地上升。所述持续时间也称作为啁啾并且所述持续时间大于与最大测量段相符的预定值。借助根据提出的原理的方法,在单个的啁啾期间可以执行用于检测距离和相对速度的完整的测量。因此,就此而言,在啁啾期间执行差拍的接收和产生。
29、另一视角涉及也将所述方法用于产生“图像”的可能性,其中扫描预定义的区域。对应地,所述方法在一些方面中包括将频率调制和幅度调制的激光束以限定量偏转的步骤。偏转在规则的时间点进行,尤其在不发生接收的时间点进行。换言之,当不发生测量时,总是改变用于偏转激光束的机构。以这种方式可以扫描更大的区域。
30、为了减少测量的干扰和错误结果,适宜的是,所产生的单模激光束的相干长度设计为,使得其至少对应于距反射单模激光束的物体的距离的二倍。
31、另一个视角涉及幅度调制信号。在一些情形下,单个幅度调制的份额可能无法提供正确的或一一对应的结果。因此,适合的是,在啁啾期间改变幅度调制频率,使得在评估和产生频谱时,存在与不同的幅度调制频率相符的多个信号份额。在一个替选的实施方案中,幅度调制信号由具有第一频率的第一分量和具有与第一频率不同的第二频率的第二分量组成。
- 还没有人留言评论。精彩留言会获得点赞!