信号传输时间选择性闪光式光探测和测距系统及其运行方法与流程
本技术享有2021年7月5日的德国申请de 102021117 333.7的优先权,其公开内容通过引用全部并入本文。本发明涉及一种信号传输时间选择性闪光式光探测和测距系统,其具有用于输出脉冲式照明辐射的发射器和用于探测单元的传输时间选择的传感器控制装置,以及一种用于运行信号传输时间选择性闪光式光探测和测距系统的方法。
背景技术:
1、用于环境检测的lidar(光探测和测距)技术众所周知,特别用于自主系统的车辆和空间技术。所使用的测量原理是飞行时间(tof)测量,其中发射器产生光信号来照射物体空间,探测单元根据飞行时间记录从位于该处的物体反射回的回波信号,这样除了获得物体的反射特性外,还能够获得角度分辨的距离信息。近红外(780nm-1.6μm,例如1550nm)的i类激光器对人眼无害,通常用作发射器。尽管通常优选使用脉冲操作的发射器来减少环境光效应引起的噪声信号,但激光雷达系统能够使用连续发射的激光器。
2、lidar系统可分为光栅lidar和闪光lidar。两种系统的组合也是可能的。对于光栅lidar,使用角度敏感发射器在不同空间方向发射光束。能够使用旋转镜或微镜阵列来引导光束。还已知使用连接在光栅lidar的发射器下游的自适应光学器件,例如液晶光学器件,用于照明辐射顺序地移动通过待检测的物体空间。
3、对于闪光lidar,使用角度敏感探测单元,通常是图像传感器,最好是红外图像传感器。可能的替代方案包括机械跟踪的可移动光电传感器或连接在传感器上游的自适应光学器件,以实现物体回波的角分辨率。对于照明,闪光lidar的发射器通常设计为使得要捕获的物体空间作为整体被照亮,其中能够使用闪光式光探测和测距系统,例如具有纳秒范围内的脉冲持续时间和例如30hz的脉冲重复率。因此,对于闪光式光探测和测距系统来说,不是使用移动的准直光束,而是使用具有足够大光束角的光锥,该光锥通常通过连接在发射器下游的扩束光学器件形成,并产生水平延伸的,优选地,测量表面区域中的物空间中的矩形照明场。
4、flash-lidar的进一步改进方案是使用信号传输时间选择性检测(范围选通)。为此,探测单元与发射器生成的照明脉冲同步。然后,探测单元以用于发射照明脉冲的限定时间偏移以及与照明脉冲持续时间协调的测量持续时间进行信号检测,使得距闪光lidar系统具有固定距离的预定测量表面选择用于检测回波信号。在当前情况下,使用术语“测量表面”是因为实际存在于辐射传播中的测量体积的深度由于通常在几纳秒的范围内选择的照明脉冲持续时间而受到限制,使得基本上面积传播方向的横向范围与物体空间的检测部分相关。照明脉冲的产生与探测单元开始信号采集之间的时间间隔的大多数顺序执行的变化使得能够选择多个深度分级的测量表面。这种距离选通成像闪光lidar在本文中被称为信号传输时间选择性闪光lidar系统。
5、当自动驾驶汽车使用信号传输时间选择性闪光式光探测和测距系统时,会出现这样的问题:眼睛保护特别需要功率有限的发射器,因此照明强度通常不足以安全检测远距离的物体,例如距离200m及以上。因此,已经提出了对象跟踪方法,其中有限的,空间移动的测量表面被单独照亮。这种方法导致复杂的信号延迟选择性闪光式光探测和测距系统无法捕获物体空间所有相关区域的环境数据。
技术实现思路
1、本发明的目的是指定一种信号传输时间选择性闪光式光探测和测距系统,特别是对于自主系统,该系统从物体空间的大区域提供高信息密度。此外,应该提到一种用于信号传输时间选择性闪光式光探测和测距系统的运行方法,其使得数据处理得以简化。
2、该目的通过权利要求1中提到的信号传输时间选择性闪光式光探测和测距系统来实现。权利要求13列出了根据本发明的用于运行信号传输时间选择性闪光式光探测和测距系统的方法的特征,并且进一步的实施例是从属权利要求的主题。
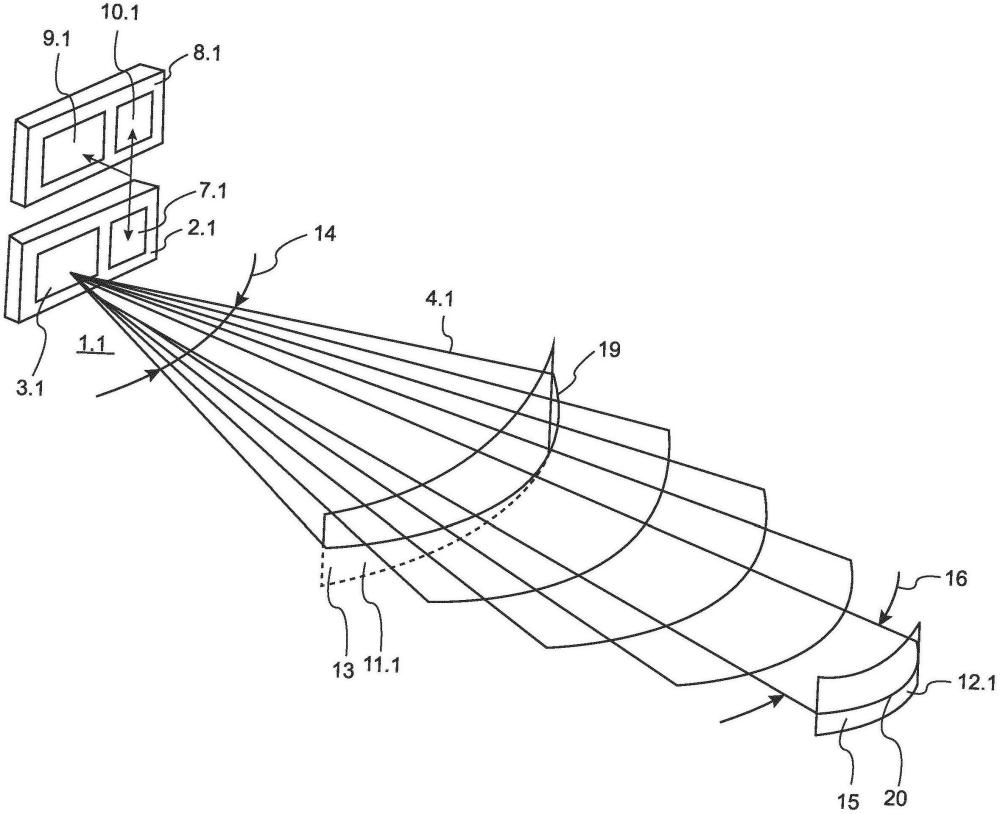
3、本发明的出发点是信号传输时间选择性闪光式光探测和测距系统。其包括:具有发射器(优选为红外激光器)的照明系统,用于将脉冲式照明辐射发射到物体空间中;以及具有图像传感器的探测单元,用于检测从物体空间反射回的辐射。传感器控制装置用于传输时间选择,其被设计用于使得反射回的辐射由物体空间中的第一测量面和第二测量面分开地检测,其中,在这种情况下假设:第二测量面相比于第一测量面距探测单元的距离更远。优选地,测量大量深度分级测量表面的背反射。各个测量表面的选择由用于传输时间选择的传感器控制装置来执行,该传感器控制装置在时间上与照明场控制装置同步。此外,通过照明场控制装置调节在通过发射器针对相应的测量表面的照射脉冲的发射和与照明脉冲持续时间协调的测量持续时间之间的时间偏移。
4、为了实现该目的,发明人认识到,对于远距离的测量表面,应当使用集中在具有相应高亮度的紧凑照明场上的照明。这为远距离物体的分类提供了更精确的测量数据,从而能够以简化且更准确的方式进行基于模型或基于人工智能的数据处理。尽管较低的亮度就足够了,但近距离范围内需要广泛扩展的照明场。在附近,需要尽可能宽的视野,以便捕获附近尽可能多的物体。根据本发明,照明场控制装置因此被设计用于使得通过照明辐射在第一测量面上产生具有第一立体角范围的第一照明场并且在第二测量面上产生具有第二立体角范围的第二照明场,且第一立体角范围选择为大于第二立体角范围。分配给相应照明场的立体角范围是指从照明系统发出的电磁辐射在所考虑的测量表面上占据的立体角。
5、特别地,对于根据本发明的信号传输时间选择性闪光式光探测和测距系统在自动驾驶车辆中的应用,优选地设计立体角范围随着照明场与探测单元之间的距离减小而连续增加。这样照明场的水平扩展就增加了,因为近距离对于记录交通环境特别重要。
6、用于确定水平扩展的方向是相对于信号传输时间选择性闪光lidar系统的坐标系来定义的,其基于圆柱形或球形坐标系,并且水平扩展沿着照明场的横向表面来确定。当信号传输时间选择性闪光式光探测和测距系统相对于环境处于中立位置时,该方向对应于环境坐标系的方向。对于在车辆中移动的系统,照明场相对于周围坐标系的水平扩展被理解为时间平均的意义。此外,不近似矩形的照明场的水平扩展被确定为由水平部分确定的表面线的在整个照明面上平均的扩展。
7、相应的测量表面中的照明场的立体角范围的调整能够以不同的方式进行。根据第一变体方案,照明系统包括自适应光学器件,其在照明光束路径中跟随发射器,照明场控制装置被设计用于控制自适应光学器件。
8、对于第二种变体方案,使用具有单独静态光学器件的不同光源。因此,用于第二变体方案的发射器包括第一光源和第二光源,每个光源在物体空间的不同空间方向上输出脉冲式照明辐射。用于第二变体方案的照明场控制装置被设计用于使得第一光源将照明辐射供应到第一照明场并且第二光源仅有助于第二照明场的照明。第一光源还能够提供第一照明场和第二照明场。因此,不同的光源能够彼此组合,以实现根据本发明的相应照明场的距离自适应扩展。还能够将多个光源与一个或多个自适应光学器件一起使用。
9、用于第一变体方案的自适应光学器件能够包括在照明辐射路径中跟随发射器的液晶光学器件。在此,液晶光学器件能够被设计为一件式的,或者存在具有多个液晶光学器件模块的装置。对于进一步的改进方案,液晶光学器件配备了温度控制装置,能够确保运行时足够的温度稳定性,特别是对于暴露于不断变化的环境温度的自主系统。
10、对于两种变体方案的另一实施例,发射器能够包括至少一个表面发射红外激光二极管(vcsel)。这允许简化光束引导,因为表面发射红外激光二极管提供具有良好准直的电磁辐射。当液晶光学器件用作自适应光学器件时,这是特别有利的。替代地或附加地,能够使用布置在发射器和液晶光学器件之间的准直光学器件。
11、在一些实施例中,探测单元具有用于检测从物体空间反射回的辐射的图像传感器,并且传感器控制装置被设计用于使得对从第一测量面反射回的辐射的检测相对于对从第二测量面反射回的辐射的检测在时间上错开地进行。因此,信号传输时间选择性闪光式光探测和测距系统以时间控制的方式工作。
12、在一些实施例中,探测单元包括具有适合于第一照明场的第一静态成像系统的第一图像传感器和具有适合于第二照明场的第二静态成像系统的第二图像传感器。如果有两个以上的照明场,则图像传感器的数量相应增加。
13、在一些实施例中,照明场的质心位于一条直线上。此外,对于进一步的设计,存在探测单元的中心与相应照明场的质心之间的连接线指向不同方向和/或这些方向随时间变化的可行性,从而将信号传输时间选择性闪光式光探测和测距系统利用光栅lidar的附加功能扩展为混合系统。
14、根据本发明的用于运行信号传输时间选择性闪光式光探测和测距系统的方法使用照明场控制装置,该照明场控制装置在第一测量面中生成具有第一立体角范围的第一照明场并且在第二测量面中生成具有第二立体角范围的第二照明场,其中,当第一测量面相比于第二测量面更靠近探测单元时,第一立体角范围被选择为大于第二立体角范围。这确保了以大开角捕获照明近场。因此,附近环境中优选有更多数量的测量数据,这对于自主导航以避免碰撞特别重要。在远距离中,由于集中在较窄的视场上,能够提高照明的功率密度,从而使物体识别所需的数据处理不那么复杂,总体上在物体特性的分类时确保了改进的准确性。
- 还没有人留言评论。精彩留言会获得点赞!