用于对磁传感器和/或校准磁体进行校准的方法和装置与流程
背景技术:
技术实现思路
1、上述技术问题和其它技术问题通过根据独立权利要求的方法和装置来解决。本发明的优选实施例和/或变形方案在从属权利要求中给出。
2、根据下文要求保护的本发明的一方面的用于对磁传感器和/或校准磁体进行校准的方法可以包括下面的权利要求1的步骤。
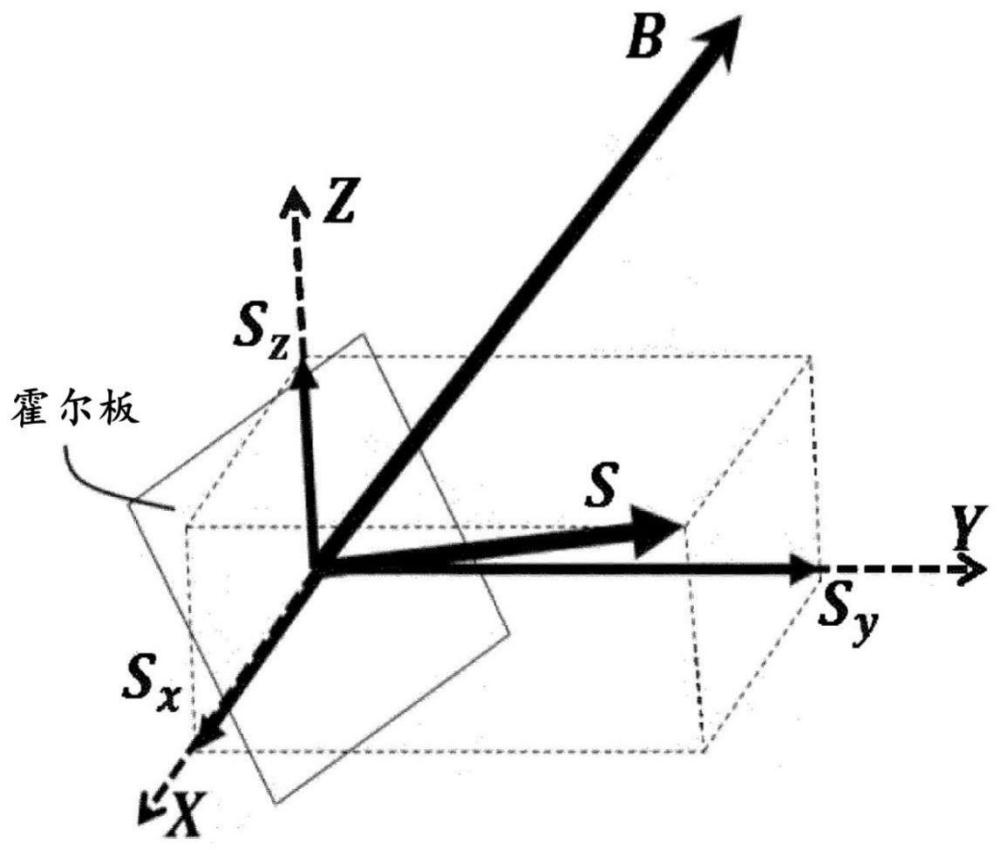
3、根据本发明,提供一种用于对磁传感器和/或校准磁体进行校准的方法,其中,所述传感器在经受磁场时,表现出由表示的输出电压v,其中,v0表示磁传感器的偏移电压,并且表示磁传感器的灵敏度矢量和磁场矢量的标量积,所述方法可以包括如下步骤:
4、a.对于磁传感器相对于磁场的第一取向,测量第一输出电压v1;
5、b.特别是相对于磁场旋转磁传感器,以采取n-1个另外的取向,其中,并且每一个取向由旋转矩阵定义,其中,对于n∈{2,…,n},并且对于n≠m∈{2,…,n},
6、c.对于每一个另外的取向,测量一个另外的输出电压vn,其中,n∈{2;…;n};以及
7、d.对于v0、sx、sy、sz、bx、by和/或bz中的一个或多个,求解一组n个方程式其中,
8、因此,一般来说,输出电压v将取决于磁传感器(为了简洁起见,下文中也称为传感器)的取向、特别是相对于磁场的取向,和/或随着传感器的取向、特别是相对于磁场的取向而改变,并且在传感器或者磁场、特别是产生电场的磁体旋转时将发生变化。在下文中,也可能将取向称为位置。传感器特别是可以是霍尔传感器、特别是霍尔板。
9、一般来说,偏移电压v0是特定于单独的传感器的,但是可能随着时间缓慢地变化。偏移电压也可能取决于其它参数、特别是传感器的温度等。一般来说,两个不同的传感器将具有不同的偏移电压。
10、磁场特别是可以由校准磁体产生。磁场也可以由校准磁体产生的校准磁场和一个或多个另外的磁场、特别是地球的(局部)磁场的叠加产生。
11、为了使磁传感器相对于磁场旋转,可以在参考坐标系中旋转磁传感器,特别是围绕由矢量定义的轴和/或平行于矢量的轴旋转角度α,其中,所述矢量是相对于参考坐标系定义的。更一般地,磁传感器可以进行旋转其中,是表征相对于参考坐标系的旋转的矩阵。替换地,磁传感器可以保持静止,而磁场可以进行反向旋转,特别是围绕由矢量定义的轴和/或与矢量平行的轴旋转-α,或者更一般地,进行由定义的旋转,其中,特别是可以通过旋转产生磁场的磁体、特别是校准磁体来旋转磁场。
12、在实施例中,磁传感器和磁场两者可以相继地和/或交替地旋转,特别是分别旋转多次,以采取n-1个另外的(相对)取向,其中,可以重复地采取至少一个相对取向。这可以允许更高的校准精度。
13、参考坐标系特别是可以是静态坐标系,其在磁传感器和/或磁场旋转时保持固定和/或静止,并且特别是可以由实验室的墙壁和地板和/或后者之间的边缘和/或角落来定义。
14、简而言之,根据下文中要求保护的发明的用于对定向磁场传感器(sensor)和/或校准所使用的磁体(magnet)的校准的方法可以包括以下步骤中的一个或多个步骤、特别是全部步骤:
15、-将传感器以相对于磁体的坐标系的有限数量的(n个)角度位置(position)和/或取向放置在磁体的磁场中;
16、-在这些位置中的每一个处测量传感器的输出电压(voltage);
17、-将每一个测量的电压代入相应的方程式中,对于给定的位置(position),该方程式将测量的电压(voltage)与传感器(sensor)的灵敏度矢量的分量和磁体(magnet)的磁场的分量相关;以这种方式,得到一组n个方程式;
18、-所述方程式组的解给出了偏移、和/或传感器(sensor)的磁灵敏度矢量的分量和/或磁体(magnet)的磁场矢量的分量的值。
19、优选选择位置和/或取向,使得所述方程式组是可解析求解的。
20、传感器可以由电气和/或电子电路(下文中称为电路)组成或者包括电气和/或电子电路。电路可以包括布线、印刷电路等;和/或无源电气元件,例如电阻器、二极管、电容器、电感器等。电路可以包括电源和/或存储装置,特别是(可再充电)电池和/或电容器。电路可以包括终端和/或无线连接装置(例如rfid或者类似装置),特别是用于将传感器与外部电气和/或电子测量设备进行连接和/或接口,例如用于进行测量数据获取、处理、分析和/或表示。电路可以包括或者表示逻辑电路。电路可以包括集成电路,特别是通用中央处理单元(central processing unit,cpu)、微控制器、精简指令集计算机(reducedinstruction set computer,risc)处理器、专用集成电路(application specificintegrated circuit,asic)、可编程逻辑电路(programmable logic circuit,plc)、现场可编程门阵列(field programmable gate array,fpga)和/或任意其它电路或者处理设备。电路可以包括非易失性存储器,特别是eprom或者eeprom。(实际的)传感器可以与电路一起构成传感器单元。
21、包括传感器的传感器单元可以由外壳(例如壳体)组成或者包括外壳(例如壳体)。外壳可以与传感器单元一体成型,例如通过将单元铸塑到热塑材料中。外壳可以构成用于传感器的封装、也称为传感器封装。
22、优选相对于传感器和/或传感器封装的自然坐标系、特别是笛卡尔坐标系来确定sx、sy、sz。这样的坐标系可以由传感器和/或传感器封装的边缘来定义,其中,可以选择线性独立的、优选正交的单位矢量和使得其与传感器和/或传感器封装的边缘一致和/或与由传感器和/或传感器封装的边缘定义的方向上的点一致。特别是在传感器和/或传感器封装具有立方体、优选长方体的形状的情况下,可以选择单位矢量和使得其沿着在所述立方体的一角处连结的三个边缘的各自的方向指向,和/或垂直于定义立方体的面地延伸。
23、替换地,可以在第一步骤中相对于任意坐标系确定sx、sy、sz,随后可以通过变换为传感器和/或传感器封装的自然坐标系来确定灵敏度矢量的分量sx′、sy′和sz′,传感器和/或传感器封装的自然坐标系具有如上所述的单位矢量和
24、随后,可以将灵敏度矢量的分量sx、sy、sz和/或sx′、sy′和sz′存储在非易失性存储器中,特别是如上所述包括传感器的传感器单元所包括的eprom或者eeprom中。这允许借助校准后的传感器高效且无差错地确定矢量磁场,特别是包括矢量磁场在空间中的正确取向。
25、因此,本发明尤其是具有以下优点:
26、首先,克服了先前的技术中的缺陷(或者偏见),即,定向磁传感器的校准只能在如下的磁场中进行,该磁场要么是不存在的(用于偏移校准),要么其已经精确地知道模数和角度位置两者(用于灵敏度校准)。相反,根据本发明,
27、-可以在存在任意且未知的磁场的情况下测量偏移;
28、-可以通过将磁传感器暴露于如下的磁场矢量中来确定灵敏度矢量,其中,仅该磁场矢量的模数是先验地已知的,而该磁场矢量的角度位置是不相关的。
29、涉及磁场的唯一相关的条件是该磁场在测量期间保持恒定。
30、其次,所提出的方法还使得能够测量校准所使用的磁体的磁场矢量的角度位置,而不依赖于几何形状、材料特性,并且也不依赖于磁力计的先前的校准。
- 还没有人留言评论。精彩留言会获得点赞!