一种运载体倾斜状态下惯导系统姿态角误差高精度测量方法与流程
本发明属于谐振惯导系统领域,具体涉及一种运载体倾斜状态下惯导系统姿态角误差高精度测量方法。
背景技术:
1、谐振惯导系统是以谐振陀螺为核心敏感元件,结合加速度计组件组成的新型惯性导航系统。谐振惯导系统一般采用捷联式安装,即谐振惯导系统与运载体固连,已知运载体坐标通过姿态变换矩阵即可求得谐振惯导系统中各惯性元件的姿态矩阵,进而实现导航数据的解算。
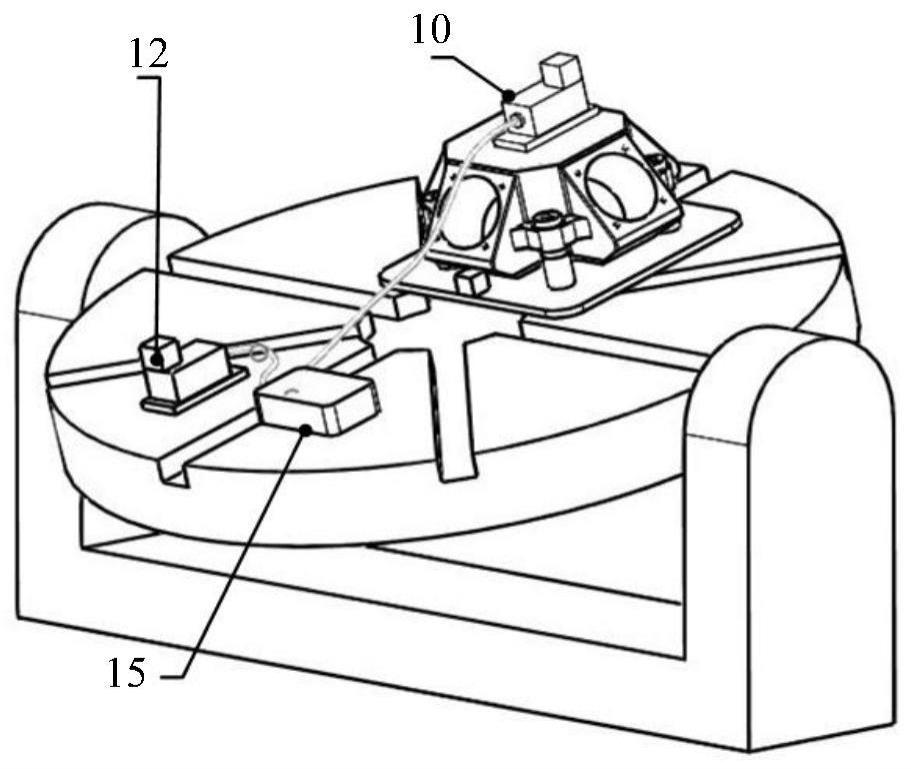
2、但是,在实际应用中,为了防止外界冲击振动对谐振惯导系统1中惯性元件造成损伤,谐振惯导系统与安装底板3之间会采用橡胶减振装置2,如图1所示。橡胶减振装置作为弹性元件,当运载体偏转一定角度α时,在重力矩的作用下,橡胶减振装置受力不均匀,进而导致其变形量不一样,从而使得谐振惯导系统相对运载体的姿态角转动β。
3、在运载体倾斜状态时,为消除谐振惯导系统自身姿态角变化对系统造成的干扰,需要设计一种运载体倾斜状态下惯导系统姿态角误差高精度测量方法。通过测量运载体在不同倾斜状态时,谐振惯导系统相对运载体的姿态角变化量,形成补偿矩阵,以提高谐振惯导系统的导航精度。
技术实现思路
1、本发明的目的是在于克服现有技术的不足之处,提供一种运载体倾斜状态下惯导系统姿态角误差高精度测量方法。
2、本发明的上述目的通过如下技术方案来实现:
3、一种运载体倾斜状态下惯导系统姿态角误差高精度测量方法,其特征在于:借助调整到位测量组件a和测量组件b来实现,两组测量组件均由一高精度电子水平仪和固定在其上端的光学六面体构成,包括以下步骤:
4、步骤1、先后组装和调整两组测量组件,使每组测量组件中的高精度电子水平仪的测量轴线与光学正六面体的法向轴线一致;
5、步骤2、将测量组件b与谐振惯导系统平台取齐组装,使将测量组件b的测量轴线与谐振惯导系统的艏向镜法向轴线垂直;
6、步骤3、在单轴转台上安装测量组件a,使测量组件a测量轴线与单轴转台艏向镜方位法线平行;
7、步骤4、将取齐组装后的测量组件b与谐振惯导系统平台安装到单轴转台上,使测量组件b测量轴线与单轴转台艏向镜方位法线平行;
8、步骤5、转动单轴转台模拟运载体横摇状态,在该状态下,测量谐振惯导系统姿态角误差;
9、步骤6、调整谐振惯导系统相对于测量组件b的方位角,再将谐振惯导系统转动90°安装置单轴转台上,调整到位后,转动单轴转台模拟运载体纵摇状态,在该状态下,测量谐振惯导系统姿态角误差;
10、步骤7、由步骤5中的单轴转台的转角及在该转角下对应的谐振惯导系统姿态角误差、步骤6中的单轴转台的转角及在该转角下对应的谐振惯导系统姿态角误差构成姿态角误差补偿量,对谐振惯导系统姿态角进行精确补偿。
11、进一步的:步骤1采用的辅助装置包括:高精度双轴转台、两台经纬仪;步骤1包括如下步骤:
12、1.1、调平高精度双轴转台
13、将双轴转台内框及外框角度均置为0°,在内框台面上放置高精度电子水平仪,调整支撑双轴转台的千斤顶,使高精度电子水平仪示值小于1″,保证内框台面与水平面平行;
14、1.2、使高精度电子水平仪的测量轴线与高精度双轴转台的外框轴线取齐
15、1)先转动双轴转台内框,初步使高精度电子水平仪测量轴线与双轴转台外框轴线取齐;
16、2)然后使双轴转台外框顺时针转动15°,静止后轻微转动双轴转台内框使得高精度电子水平仪的示值小于1″;再次使双轴转台外框顺时针转动15°,静止后轻微转动双轴转台内框使得高精度电子水平仪的示值再次小于1″;然后将高精度电子水平仪固定牢靠;
17、3)然后将双轴转台外框转动到-30°~30°范围内的任意角度进行复测,观察高精度电子水平仪的示值是否小于1″;若任意角度测量时高精度电子水平仪的示值始终小于1″,则确认已将高精度电子水平仪的测量轴线与外框轴线取齐;
18、1.3、采用双经纬仪互瞄的方法在固定后的高精度电子水平仪上安装光学正六面体
19、1)在步骤1.2的基础上,先将高精度双轴转台的外框置为0;
20、2)沿高精度电子水平仪测量轴线方向架设自准值经纬仪a,将自准直经纬仪a与外框轴头镜取齐,且将此时自准值经纬仪a的方位示数置为0°;
21、3)在垂直于高精度电子水平仪测量轴线的方向上架设自准值经纬仪b,具体为:分别转动自准值经纬仪a和b,将经纬仪a和b进行互瞄,记录此时经纬仪a的方位示数为α;将自准值经纬仪b的方位示数置为(180+α)°,转动自准值经纬仪b,直至其方位示数为270°,将经纬仪b固定不动;
22、4)调整光学正六面体在高精度电子水平仪表面上的位置及方位,直至自准值经纬仪b成像,调至角度偏差小于1″;最后将光学正六面体固定在高精度电子水平仪上表面,完成光学正六面体的安装。
23、进一步的:步骤2中测量组件b的测量轴线与谐振惯导系统的艏向镜法向轴线垂直调整方法、步骤3中测量组件a测量轴线与单轴转台艏向镜方位法线平行调整方法、步骤4中量组件b测量轴线与单轴转台艏向镜方位法线平行调整方法均采用步骤1中光学正六面体的安装方法。
24、进一步的:步骤5包括如下步骤:
25、5.1、将单轴转台角度置为0°,读取测量组件b的示数为β1″及测量组件a的示数为β2″,则测量组件b与测量组件a的初始差分读数值δ0=β1″-β2″;
26、5.2、将单轴转台转动α°,静止后测量组件b的示数为βi1″,测量组件a的示数为βi2″,则当谐振惯导系统倾斜状态为α°时,测量组件b与测量组件a的差分读数值δi=βi1″-βi2″,则在重力矩的作用下,谐振惯导系统的姿态角误差为ζ=(δi-δ0);
27、5.3、通过测量单轴转台特定角度下,测量组件b与测量组件a的差分读数值δi与δ0,绘制出谐振惯导系统随运载体横摇时姿态角误差ζ=(δi-δ0)″随系统倾斜状态α°的变化曲线。
28、进一步的:步骤6包括如下步骤:
29、6.1、拆下测量组件b,将测量组件b转动90°,使测量组件b的测量轴线与谐振惯导系统的艏向镜法向轴线调至平行,保证角度偏差小于1″,调整完毕后将测量组件b固定安装到谐振惯导系统平台上表面;
30、6.2、将单轴转台角度置0,将谐振惯导系统平台和测量组件b的组合件转动90°,将测量组件b的测量轴线调至与转台艏向镜法向轴线平行,保证方位角度偏差小于1″,调整完毕后将谐振惯导系统平台和测量组件b的组合件固定安装到转台平面上;
31、6.3、重复步骤5,将单轴转台角度置为δ°,绘制出当运载体纵摇时谐振惯导系统姿态偏转角度γ随系统倾斜状态δ°的变化曲线。
32、本发明具有的优点和积极效果:
33、1、本发明通过使用转台、高精度电子水平仪、自准值经纬仪和光学六面体等,利用光学对准的方法,高精度测量不同倾斜状态下谐振惯导系统姿态角的变形量,形成姿态角误差补偿量,从而保障谐振惯导系统导航精度。
34、2、本发明采用的仪器或设备为通用仪器设备,具有操作简单、易于实现的优点。
- 还没有人留言评论。精彩留言会获得点赞!