一种实时投影色差图的扫描投影系统及扫描投影方法与流程
本发明涉及三维扫描测量,尤其涉及一种实时投影色差图的扫描投影系统及扫描投影方法。
背景技术:
1、结构光三维成像的硬件(后面简称“3d相机”)主要由相机和投射器组成,结构光通过投射器投射到被测物体表面的主动结构信息,如激光条纹、格雷码、正弦条纹等;然后,通过单个或多个相机拍摄被测表面即得结构光图像;最后,基于三角测量原理经过图像三维解析计算从而实现三维重建。条纹投影技术实际上属于广义上的面结构光。其主要原理如下图所示,即通过计算机编程产生正弦条纹,将该正弦条纹通过投影设备投影至被测物,利用单个或者多个相机拍摄条纹受物体调制的弯曲程度,解调该弯曲条纹得到相位,再将相位转化为全场的高度。
2、基于这样的设计原理,双目3d相机设备具有2个相机和1个投射器。相机和投射器在结构几何上成一定夹角分布,2个相机和投射器共同的可视范围是设备的可视范围,并且2个相机和投射器的镜头的焦距都聚焦在基准距线上。这三个部件是通过金属骨架固定的,三者的空间位置关系可以通过标定来得到。
3、使用3d相机来拍摄被测物体,可以得到物体的测量模型,但是目前3d相机得到的测量模型需要人工和设计模型进行对比,才能够知晓被测物体的偏差信息,使用起来不够直观,便利程度不够。因此,人们亟需一种能够更直观地观察出误差的实时投影色差图的扫描投影系统。
技术实现思路
1、有鉴于此,有必要提供一种实时投影色差图的扫描投影系统及扫描投影方法,用以在检测时能够更直观地观察出被测物体和设计模型之间的误差。
2、为达到上述技术目的,本发明采取了以下技术方案:
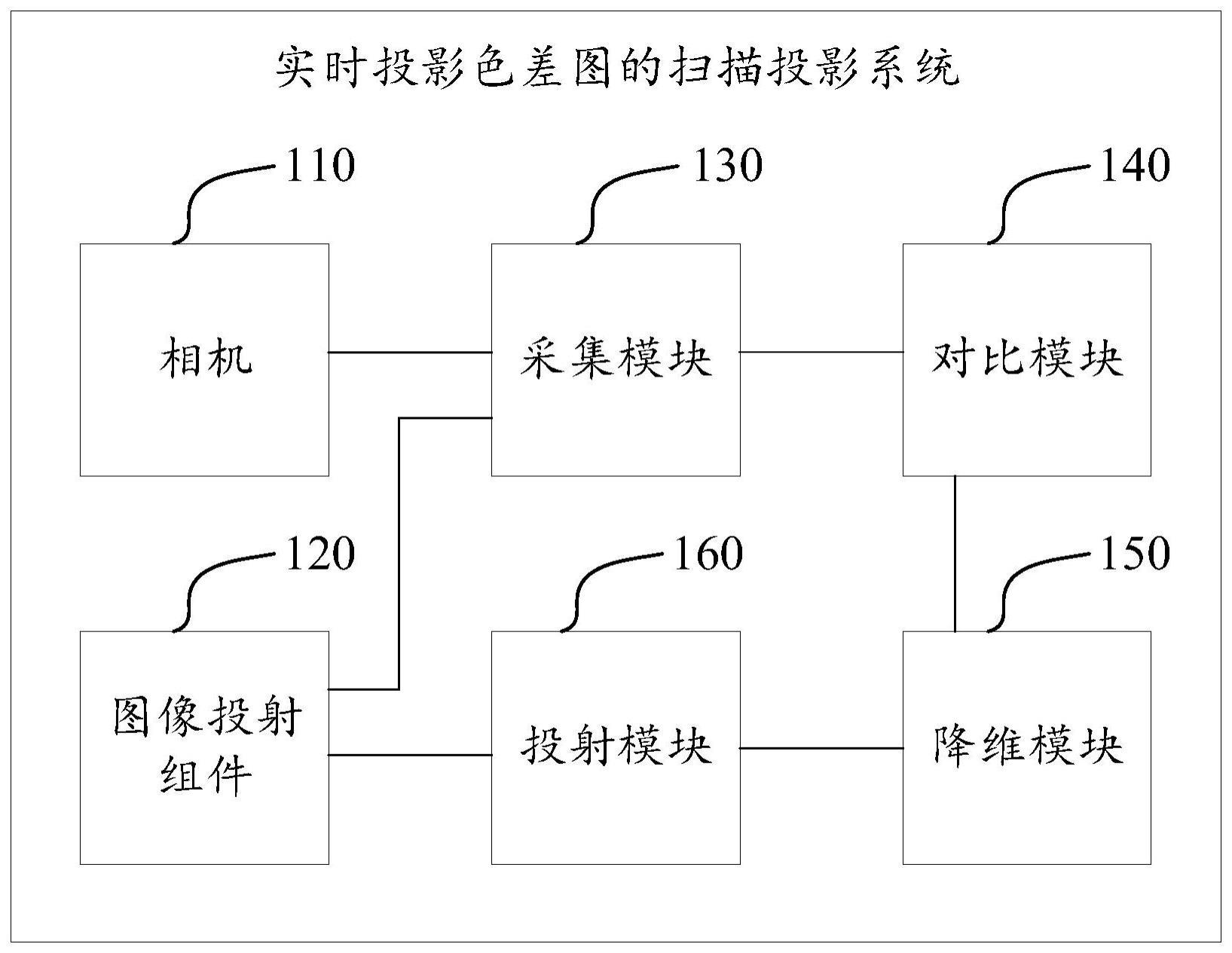
3、第一方面,本发明提供了一种实时投影色差图的扫描投影系统,包括两个相机、图像投射组件以及依次电连接的采集模块、对比模块、降维模块和投射模块,所述采集模块电连接所述相机和所述图像投射组件,所述投射模块电连接所述图像投射组件,其中:
4、所述采集模块,用于基于所述相机和所述图像投射组件,获取被测物体的测量模型数据;
5、所述对比模块,用于对比所述测量模型数据和所述被测物体的设计模型数据,得到色差模型数据,所述色差模型数据用于表征所述测量模型数据和所述设计模型数据的误差;
6、所述降维模块,用于根据所述色差模型数据,得到色差图片;
7、所述投射模块,用于基于所述图像投射组件,将所述色差图片投影至所述被测物体上。
8、第二方面,本发明提供了一种实时投影色差图的扫描投影方法,应用于上述实时投影色差图的扫描投影系统,所述方法包括:
9、基于所述相机和所述图像投射组件,获取被测物体的测量模型数据;
10、对比所述测量模型数据和所述被测物体的设计模型数据,得到色差模型数据,所述色差模型数据用于表征所述测量模型数据和所述设计模型数据的误差;
11、根据所述色差模型数据,得到色差图片;
12、基于所述图像投射组件,将所述色差图片投影至所述被测物体上。
13、进一步的,所述基于所述相机和所述图像投射组件,获取被测物体的测量模型数据,包括:
14、基于所述图像投射组件,向所述被测物体上投射结构光;
15、基于所述相机拍摄所述被测物体,得到多个结构光图像;
16、根据多个所述结构光图像,得到所述测量模型数据。
17、进一步的,所述对比所述测量模型数据和所述被测物体的设计模型数据,得到色差模型数据,包括:
18、对比所述测量模型数据和所述设计模型数据的尺寸误差,得到误差数据;
19、根据所述误差数据,通过代表不同误差值的颜色渲染所述测量模型数据,得到所述色差模型数据。
20、进一步的,所述相机和所述色差模型数据的参考坐标系为相机坐标系,所述图像投射组件的的参考坐标系为图像投射坐标系;所述根据所述色差模型数据,得到色差图片,包括:
21、根据所述色差模型数据,得到图像投射模型数据,其中所述图像投射模型数据的参考坐标系为所述图像投射坐标系;
22、根据所述图像投射模型数据,得到所述色差图片。
23、进一步的,所述根据所述色差模型数据,得到图像投射模型数据,包括:
24、获取所述相机坐标系和所述图像投射坐标系的转换参数;
25、根据色差模型数据,基于所述转换参数,得到所述图像投射模型数据。
26、进一步的,所述根据所述图像投射模型数据,得到所述色差图片,包括:
27、获取所述图像投射组件的投影方向、基准距平面参数及目标投影分辨率;
28、根据所述图像投射模型数据,基于所述投影方向,得到投影图片;
29、根据所述投影图片,基于所述基准距平面参数及所述目标投影分辨率,得到所述色差图片。
30、进一步的,所述基准距平面参数包括基准距平面坐标系和基准距平面尺寸;所述根据所述投影图片,基于所述基准距平面参数及所述目标投影分辨率,得到所述色差图片,包括:
31、根据投影图片,基于所述基准据平面坐标系,得到所述投影图片的像素在所述基准距平面坐标系下的像素坐标
32、根据所述像素坐标,基于所述基准距平面尺寸和所述目标投影分辨率,得到所述投影图片的像素的色差图片像素坐标;
33、根据所述色差图片像素坐标和对应的所述投影图片的像素,得到所述色差图片。
34、进一步的,所述图像投射组件包括投射器和白光投影仪,所述投射器和所述采集模块及所述投射模块电连接,所述投射器的光源为单色光源,所述白光投影仪和所述采集模块及所述投射模块电连接,所述色差图片包括投射器色差图片和白光投影仪色差图片。
35、进一步的,所述基于所述图像投射组件,将所述色差图片投影至所述被测物体上,包括:
36、基于所述投射器,将所述投射器色差图片投影至所述被测物体上;
37、基于所述白光投影仪,将所述白光投影仪色差图片投影之所述被测物体上。
38、本发明提供一种实时投影色差图的扫描投影系统及扫描投影方法,其通过相机和图像投射组件,获取被测物体的测量模型数据,再对比测量模型数据和被测物体的设计模型数据,得到用于表征测量模型数据和设计模型数据的误差的色差模型数据,然后根据色差模型数据,得到色差图片,最后基于图像投射组件,将色差图片投影至被测物体上。相比于现有技术,本发明能够将反映误差的色差图片投影之被测物体上,供测量人员观察误差信息,省去了人为比对分析测量模型和设计模型之间误差的过程,使得误差分析更加直观,检测过程更加简便,极大地提高了用户的工作效率和体验。
技术特征:
1.一种实时投影色差图的扫描投影系统,其特征在于,包括两个相机、图像投射组件以及依次电连接的采集模块、对比模块、降维模块和投射模块,所述采集模块电连接所述相机和所述图像投射组件,所述投射模块电连接所述图像投射组件,其中:
2.一种实时投影色差图的扫描投影方法,应用于权利要求1所述的实时投影色差图的扫描投影系统,其特征在于,所述方法包括:
3.根据权利要求2所述的实时投影色差图的扫描投影方法,其特征在于,所述基于所述相机和所述图像投射组件,获取被测物体的测量模型数据,包括:
4.根据权利要求2所述的实时投影色差图的扫描投影方法,其特征在于,所述对比所述测量模型数据和所述被测物体的设计模型数据,得到色差模型数据,包括:
5.根据权利要求2所述的实时投影色差图的扫描投影方法,其特征在于,所述相机和所述色差模型数据的参考坐标系为相机坐标系,所述图像投射组件的的参考坐标系为图像投射坐标系;所述根据所述色差模型数据,得到色差图片,包括:
6.根据权利要求5所述的实时投影色差图的扫描投影方法,其特征在于,所述根据所述色差模型数据,得到图像投射模型数据,包括:
7.根据权利要求5所述的实时投影色差图的扫描投影方法,其特征在于,所述根据所述图像投射模型数据,得到所述色差图片,包括:
8.根据权利要求7所述的实时投影色差图的扫描投影方法,其特征在于,所述基准距平面参数包括基准距平面坐标系和基准距平面尺寸;所述根据所述投影图片,基于所述基准距平面参数及所述目标投影分辨率,得到所述色差图片,包括:
9.根据权利要求2所述的实时投影色差图的扫描投影方法,其特征在于,所述图像投射组件包括投射器和白光投影仪,所述投射器和所述采集模块及所述投射模块电连接,所述投射器的光源为单色光源,所述白光投影仪和所述采集模块及所述投射模块电连接,所述色差图片包括投射器色差图片和白光投影仪色差图片。
10.根据权利要求9所述的实时投影色差图的扫描投影方法,其特征在于,所述基于所述图像投射组件,将所述色差图片投影至所述被测物体上,包括:
技术总结
本发明涉及一种实时投影色差图的扫描投影系统及扫描投影方法,其中系统包括两个相机、图像投射组件以及依次电连接的采集模块、对比模块、降维模块和投射模块,本发明通过相机和图像投射组件,获取被测物体的测量模型数据,再对比测量模型数据和被测物体的设计模型数据,得到用于表征测量模型数据和设计模型数据的误差的色差模型数据,然后根据色差模型数据,得到色差图片,最后基于图像投射组件,将色差图片投影至被测物体上。相比于现有技术,本发明能够将反映误差的色差图片投影之被测物体上,供测量人员观察误差信息,省去了人为比对分析误差的过程,使得误差分析更加直观,检测过程更加简便,极大地提高了用户的工作效率和体验。
技术研发人员:周泽海,王晓南,成剑华,何源,程洪,王辰,孙繁
受保护的技术使用者:武汉中观自动化科技有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!