一种多信息柔性传感系统
本发明属于多传感器,具体地,涉及一种多信息柔性传感系统。
背景技术:
1、随着机器人技术的不断发展与应用,对外部物体、环境变化的准确、快速、可预见性感知开始成为学者研究的重点,于是学界提出了智能机器人的概念,而贴附在智能机器人上的传感器成为机器人感知外界环境变化的最主要手段。
2、单一类型的传感器在测量范围、稳定性、灵敏度、分辨率等方面存在缺陷,比如触觉传感器只能在外界物体或人体与机器人发生碰撞之后才能进行动作;接近传感器主要以超声或红外传感器为主,体积较大且信号产生与接收装置过于复杂。
3、多种类型的传感器同样存在诸多缺陷。比如信号之间存在时间差、信号与信号之间的串扰与耦合现象,容易出现传感器输出值与实际环境变化情况差别较大、解耦算法过于复杂导致机械臂运动实时性较差、外界环境中的人体变化或多种环境因素的变化感知功能缺失,每一种类型的响应时间难以突破毫秒量级。
技术实现思路
1、本发明提出了一种多信息柔性传感系统,能够同时进行接近距离、接触压力、环境温度和环境湿度集成感知,以解决现有只能通过围栏等进行被动安全控制对工业安全生产效率的严重制约的问题。
2、本发明通过以下技术方案实现:
3、一种多信息柔性传感系统:
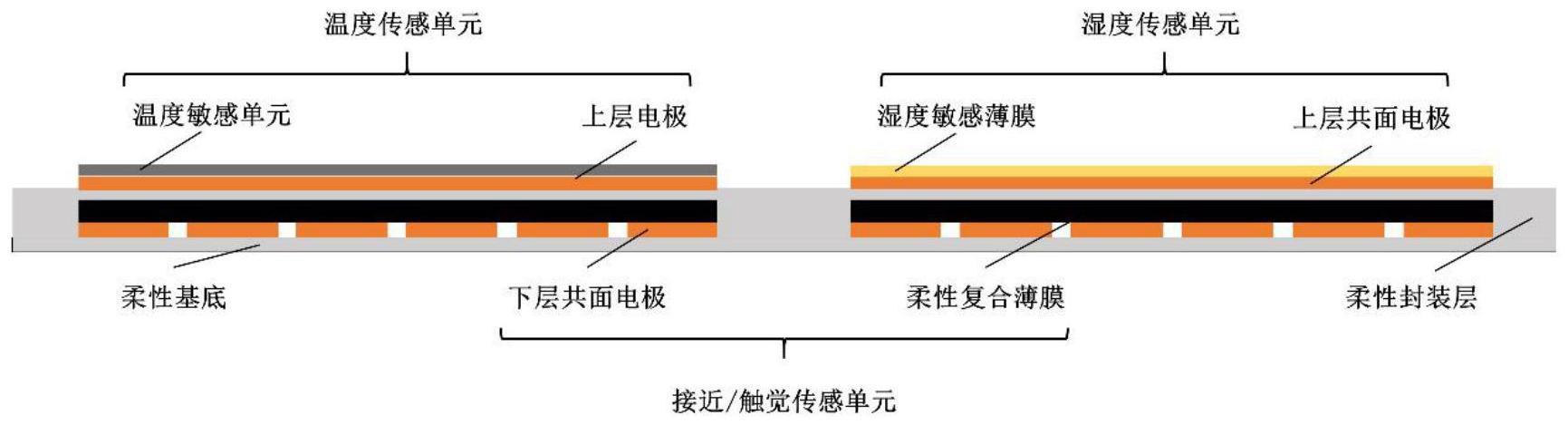
4、所述多信息柔性传感系统包括接近传感单元、触觉传感单元、温度传感单元和湿度传感单元;
5、所述接近传感单元和触觉传感单元位于柔性基底中,由柔性封装层封装;温度传感单元和湿度传感单元位于柔性基底上方外侧;
6、所述温度传感单元由温度敏感薄膜和上层共面电极连接而成;
7、所述湿度传感单元由湿度敏感薄膜与上层共面电极组成;
8、所述接近传感单元和触觉传感单元均由柔性复合薄膜和下层共面电极组成。
9、进一步地,
10、所述柔性基底和柔性封装层选择具有良好化学稳定性、弯折性、贴合性、低透水率和电绝缘性的有机材料;包括聚二甲基硅氧烷pdms、聚对苯二甲酸乙二酯pet和聚酰亚胺pi等。
11、所述柔性复合薄膜的工艺采用聚合物与低维导电材料共混的方法;
12、所述聚合物包括聚二甲基硅氧烷pdms、聚对苯二甲酸乙二酯pet和聚酰亚胺pi等;所述低维导电材料包括石墨烯、碳纳米管、炭黑、银纳米线、铟镓合金和金属粉末等。
13、进一步地,
14、所述上层共面电极和下层共面电极均为柔性共面电极;
15、所述柔性共面电极采用化学腐蚀、激光切割、喷涂或3d打印方法在柔性基底和柔性封装层上制备而成。
16、进一步地,
17、所述温度传感单元中的温度敏感薄膜包括金属薄膜、陶瓷半导体、温敏二极管和三极管薄膜;
18、所述湿度传感单元中的湿度敏感薄膜包括湿度敏感陶瓷、有机物、高分子聚合物和湿敏二极管。
19、一种多信息柔性传感系统的控制方法:
20、所述多信息柔性传感系统中的接近传感单元和湿度传感单元输出电容变化量,触觉传感单元和温度传感单元输出电阻变化量;
21、所述接近传感单元和触觉传感单元共用一组电极,温度传感单元和湿度传感单元共用一组电极,两组电极同时与测试电路板相连,实现四个信号的同时输出。
22、进一步地,
23、当外界物体或人体靠近多信息柔性传感系统时,接近传感单元的信号发生变化,电容值减小;
24、物体或人体与多信息柔性传感系统发生碰撞后,触觉传感单元信号发生变化,电阻值减小。
25、进一步地,
26、在所述温度传感单元中,温度敏感薄膜的阻值随温度升高而增大,外界环境温度改变或不同温度物体或人体接触多信息柔性传感系统时,温度传感单元信号发生变化,接近过程中温度敏感薄膜的电阻逐渐增大到物体温度对应阻值,接触过程中电阻随压力增大而增大;
27、在所述湿度传感单元中,湿度敏感薄膜的电容随环境湿度增大而减小,外界物体接近不会使湿度敏感层的信号发生变化,物体接触后电容随压力增大而增大。
28、一种自制数据处理电路设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述方法的步骤。
29、一种计算机可读存储介质,用于存储计算机指令,所述计算机指令被处理器执行时实现上述方法的步骤。
30、一种机器人,所述机器人包括上述任意一项所述的多信息柔性传感系统。
31、本发明有益效果
32、本发明能够从多个角度进行感知,从而进行机器人主动安全控制的辅助设备。与单一形式的传感器相比,本发明从多个方面对外界环境和外界物体位置的变化进行感知,提高了传感器的感知能力和机器人主动安全控制的精确性。
33、本发明中的四种信号通过一个数据采集电路进行采集,即下位机向上位机同时传输四个信号,使四个信号具有优异的同步性,能够同时对外界环境和外界物体位置的变化同时进行感知,大大提高传感器的同步感知能力和降低机器人主动安全控制的延迟和信号干扰。
技术特征:
1.一种多信息柔性传感系统,其特征在于:
2.根据权利要求1所述多信息柔性传感系统,其特征在于:
3.根据权利要求2所述多信息柔性传感系统,其特征在于:
4.根据权利要求3所述多信息柔性传感系统,其特征在于:
5.一种多信息柔性传感系统的控制方法,其特征在于:
6.根据权利要求5所述方法,其特征在于:
7.根据权利要求6所述方法,其特征在于:
8.一种自制数据处理电路设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求5至7中任意一项所述方法的步骤。
9.一种计算机可读存储介质,用于存储计算机指令,其特征在于,所述计算机指令被处理器执行时实现权利要求5至7中任意一项所述方法的步骤。
10.一种机器人,其特征在于:所述机器人包括如权利要求1至4中任意一项所述的多信息柔性传感系统。
技术总结
本发明提出了一种多信息柔性传感系统,包括接近与触觉传感单元、温度传感单元和湿度传感单元;当外界物体接近、接触、温度变化或湿度变化时,可以根据不同传感器的信号变化情况进行判断,不同传感器的信号变化对机器人产生不同的动作;本发明从多个方面对外界环境和外界物体位置的变化进行感知,提高了传感器的同步感知能力和机器人主动安全控制的精确性降低了不同传感单元之间的交叉耦合度和机器人主动安全控制的延迟和信号干扰。
技术研发人员:张甲,葛传洋,王振龙,安煦阳,陈佳泰
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!