一种悬索桥重力锚锚管群的快速定位方法与流程
本申请涉及桥梁施工测量,具体涉及一种悬索桥重力锚锚管群的快速定位方法。
背景技术:
1、目前,重力锚锚管群是悬索桥的主缆主要锚固形式,也是悬索桥的关键受力结构。主缆的两端分散成若干钢丝束,每个钢丝束对应固定于一根锚管,使得主缆的力分散到体积巨大的重力锚上,承力稳定。
2、重力锚锚管群的空间关系复杂,锚管数量众多,需要分区多次安装定位,测量工序复杂,测量精度高,仅允许偏差5毫米以内,多锚管之间的空间几何关系要求精准,施工空间狭窄,测量环境恶劣,测量控制难度大。
3、相关技术中,重力锚锚管群定位测量一般采用全站仪坐标法,将全站仪安置在已知坐标的桥梁控制网点上,根据各锚管的绝对理论坐标,对各锚管逐一分别单独进行绝对定位,定位工作量大,投入测量人员多、测量安装工效低,尤其不适应大规模锚管群。
技术实现思路
1、针对现有技术中存在的缺陷,本申请的目的在于提供一种悬索桥重力锚锚管群的快速定位方法,采用绝对定位和相对定位的方法,大大提高了锚管群的安装定位测量效率。
2、为达到以上目的,采取的技术方案是:一种悬索桥重力锚锚管群的快速定位方法,包括步骤:
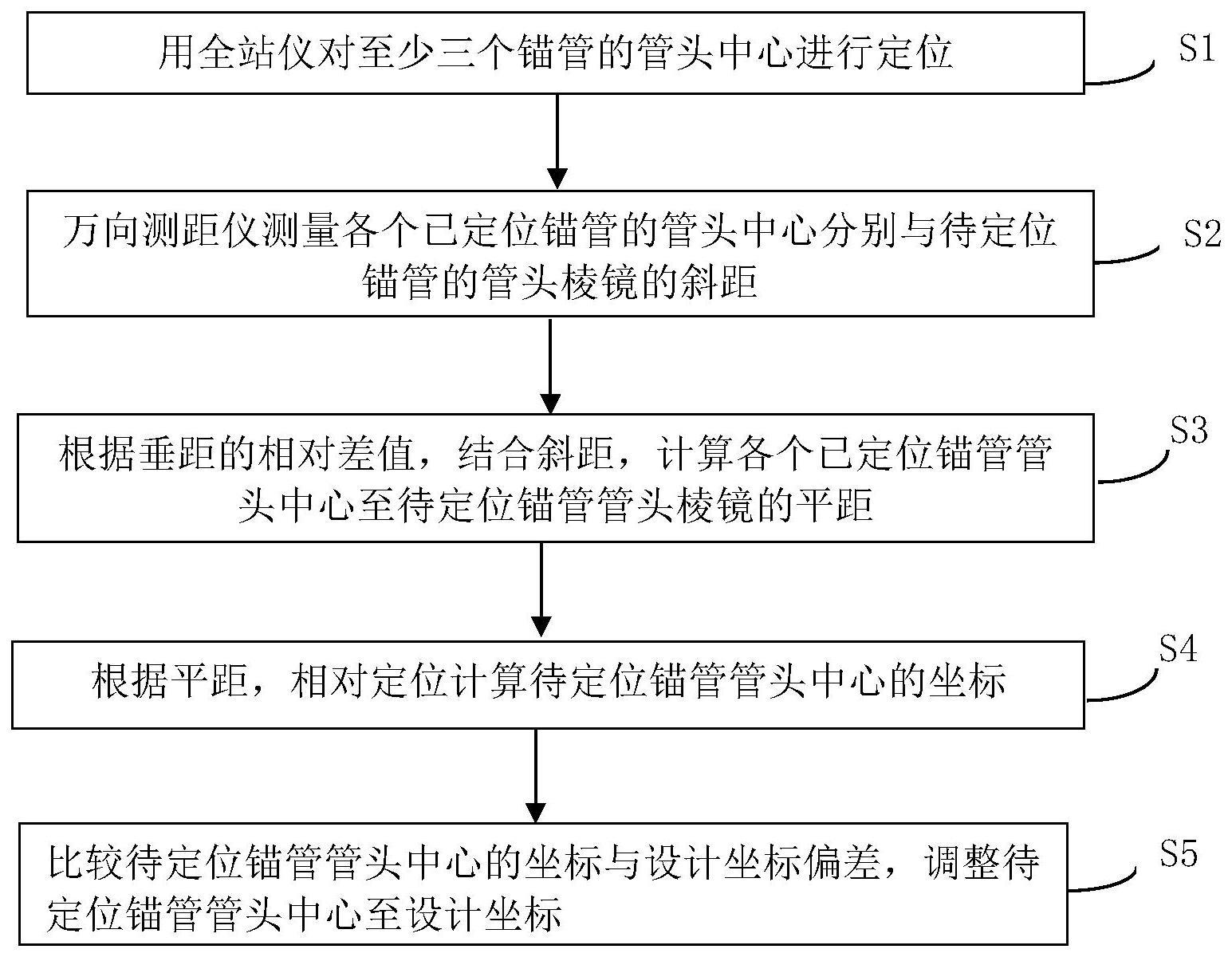
3、s1:以后锚面为xy面,建立xyz坐标系,用全站仪确定至少三个锚管的管头中心的三维坐标;
4、s2:将管头棱镜固定在待定位锚管的管头;将万向测距仪固定在已定位锚管的管头,用万向测距仪和管头棱镜测量各个已定位锚管的管头中心分别与待定位锚管的管头中心的斜距;
5、s3:根据各个已定位锚管管头中心至后锚面的垂距,分别与待定位锚管管头中心至后锚面的垂距的相对差值,结合相应的斜距,计算各个已定位锚管管头中心分别与待定位锚管的管头中心的平距;
6、s4:根据各个已定位锚管管头中心分别与待定位锚管管头中心的平距,确定待定位锚管管头中心的三维坐标;
7、s5:比较待定位锚管管头中心的三维坐标与其设计坐标的偏差,调整待定位锚管并消除偏差。
8、在上述技术方案的基础上,在步骤s2之前,还包含准备万向测距仪,所述万向测距仪包含管头仪器架和测距仪本体;
9、所述管头仪器架的底端具有用于同轴插设已定位锚管管头的第一圆形塞管,所述测距仪本体设置于管头仪器架的顶端,且管头仪器架的中间位置设置万向铰。
10、在上述技术方案的基础上,所述万向铰包含万向球头和球形底座,所述管头仪器架还包含l型杆和底座杆;
11、所述l型杆水平边的端部安装测距仪本体,所述万向球头设置于l型杆竖直边的端部;所述球形底座设置于竖直的底座杆的顶端,所述第一圆形塞管设置底座杆的底端。
12、在上述技术方案的基础上,在步骤s2之前,还包含准备管头棱镜,所述管头棱镜包含棱镜杆和棱镜本体,所述棱镜杆底端具有同轴插设待定位锚管管头的第二圆形塞管,所述棱镜本体设置于棱镜杆的顶端。
13、在上述技术方案的基础上,所述重力锚锚管群的所有锚管内径外径尺寸相同,所述第一圆形塞管和第二圆形塞管的外径等于锚管内径。
14、在上述技术方案的基础上,步骤s2中的斜距,包含:
15、各个已定位锚管管头中心至待定位锚管管头中心的斜距表示为sij;其中,i为已定位锚管的管号,j为待定位锚管的管号。
16、在上述技术方案的基础上,步骤s3包含:
17、s30:计算已定位锚管的管头中心至后锚面的垂距hi:
18、
19、其中,i为已定位锚管的管号,li为万向测距仪中心距离已定位锚管的管头端面的高度,li已定位锚管的实际管长,αi为已定位锚管(11)的中心线投影至xz面并与z轴的倾角;βi为已定位锚管(11)的中心线投影至yz面并与z轴的倾角;
20、s31:计算待定位锚管的管头至后锚面的垂距hj;
21、
22、其中,j为待定位锚管的管号,vj为管头棱镜2中心距离待定位锚管12的管头端面的高度,lj为待定位锚管的实际管长,αj为待定位锚管(12)的中心线投影至xz面并与z轴的倾角;βj为待定位锚管(12)的中心线投影至yz面并与z轴的倾角;
23、s32:计算已定位锚管的管头中心至待定位锚管管头中心的平距dij:
24、
25、在上述技术方案的基础上,步骤s4,包含:
26、若仅测量三个已定位锚管管头中心至待定位锚管管头中心的平距,且三个已定位锚管管头中心和待定位锚管管头中心符合三边交会的图形条件;按照三边交会坐标公式,计算待定位锚管管头中心的坐标。
27、在上述技术方案的基础上,步骤s4,包含:
28、若测量四个及以上已定位锚管管头中心至待定位锚管管头中心的平距,按照测边交会平差原理,平差计算待定位锚管管头中心的坐标。
29、在上述技术方案的基础上,步骤s5,包含:
30、s51:计算待定位锚管管头中心的坐标与设计坐标的偏差;
31、s52:调整待定位锚管向设计坐标移动;
32、s53:重复计算和调整过程,直到待定位锚管的管头中心坐标调整至设计坐标;
33、s54:将待定位锚管变更为已定位锚管,继续进行下一根待定位锚管定位。
34、本申请提供的技术方案带来的有益效果包括:
35、本申请的悬索桥重力锚锚管群的快速定位方法,提供辅助装置包括万向测距仪和管头棱镜,以后锚面为xy面,建立xyz坐标系,先找到三个以上基准点(已定位锚管管头中心的三维坐标);之后,利用万向测距仪和管头棱镜测量计算各个已定位锚管的管头中心分别与待定位锚管的管头中心的斜距,结合垂距的相对差值,得到相应的平距,进而确定待定位锚管的管头中心的三维坐标;比对待定位锚管管头中心的三维坐标与自身设计坐标的偏差,调整待定位锚管就位,消除偏差。本申请的悬索桥重力锚锚管群的快速定位方法,以已定位锚管为基准对待定位锚管进行相对定位,代替现有技术中对所有锚管进行绝对定位,测量工序更简单,使锚管间相对关系更准确。
技术特征:
1.一种悬索桥重力锚锚管群的快速定位方法,其特征在于,包括步骤:
2.如权利要求1所述的一种悬索桥重力锚锚管群的快速定位方法,其特征在于,在步骤s2之前,还包含准备万向测距仪(1),所述万向测距仪(1)包含管头仪器架(3)和测距仪本体(4);
3.如权利要求2所述的一种悬索桥重力锚锚管群的快速定位方法,其特征在于:所述万向铰(5)包含万向球头(7)和球形底座(8),所述管头仪器架(3)还包含l型杆(9)和底座杆(10);
4.如权利要求2所述的一种悬索桥重力锚锚管群的快速定位方法,其特征在于:在步骤s2之前,还包含准备管头棱镜(2),所述管头棱镜(2)包含棱镜杆(13)和棱镜本体(14),所述棱镜杆(13)底端具有同轴插设待定位锚管(12)管头的第二圆形塞管(15),所述棱镜本体(14)设置于棱镜杆(13)的顶端。
5.如权利要求4所述的一种悬索桥重力锚锚管群的快速定位方法,其特征在于:所述重力锚锚管群的所有锚管内径外径尺寸相同,所述第一圆形塞管(6)和第二圆形塞管(15)的外径等于锚管内径。
6.如权利要求1所述的一种悬索桥重力锚锚管群的快速定位方法,其特征在于,步骤s2中的斜距,包含:
7.如权利要求6所述的一种悬索桥重力锚锚管群的快速定位方法,其特征在于,步骤s3包含:
8.如权利要求1所述的一种悬索桥重力锚锚管群的快速定位方法,其特征在于,步骤s4,包含:
9.如权利要求1所述的一种悬索桥重力锚锚管群的快速定位方法,其特征在于,步骤s4,包含:
10.如权利要求1所述的一种悬索桥重力锚锚管群的快速定位方法,其特征在于,步骤s5,包含:
技术总结
本申请公开了一种悬索桥重力锚锚管群的快速定位方法,涉及桥梁施工测量技术领域,包括步骤:S1:建立XYZ坐标系,确定至少三个锚管的管头中心的三维坐标;S2:用万向测距仪和管头棱镜测量各个已定位锚管的管头中心分别与待定位锚管的管头中心的斜距;S3:根据垂距的相对差值,计算各个已定位锚管管头中心分别与待定位锚管的管头中心的平距;S4:确定待定位锚管管头中心的三维坐标;S5:比较待定位锚管管头中心的三维坐标与其设计坐标的偏差,调整待定位锚管并消除偏差。本申请的悬索桥重力锚锚管群的快速定位方法,采用绝对定位和相对定位的方法,大大提高了锚管群的安装定位测量效率。
技术研发人员:陈飞,上官科峰,邓少锋,肖根旺,张云,王晓智,李明欢,陈杰,荊鹏,高鑫,李鹏
受保护的技术使用者:中铁大桥局集团有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!