一种地图轨迹平滑方法及装置与流程
本申请涉及数据处理的,特别是涉及一种地图轨迹平滑方法及装置。
背景技术:
1、自动驾驶对于地图的要求很高,需要地图与定位、感知、运动规划和控制等模块相互配合。高精地图精度更高,定位更准确,可以提供超感知距离的周边信息,提供更丰富的语义信息层,包含道路标线、标识等,可以辅助车辆进行运动规划,能更好地为自动驾驶的汽车和机器服务。
2、一般而言,高精地图基础层提供的路径轨迹定位数据都会存在一定的误差,其输出的轨迹点如果出现异常的噪点,或者轨迹的曲线不够光滑,会导致车辆运行时出现顿挫,定位不精准等问题,造成行驶故障、急停,影响车辆的自动驾驶以及驾乘的体验感、安全性等。利用拉格朗日多项式进行数据的函数拟合,容易造成过拟合,且在数据边界处会形成震荡,难以看出数据的趋势;而利用三阶样条的方式,分段的三次函数连接各数据点,进行曲线拟合,会导致其分段函数难以进行迭代计算,无法反应数据的整体趋势。
3、因此,如何使对地图轨迹进行的平滑处理达到更好的效果,是本领域技术人员亟需解决的技术问题。
技术实现思路
1、有鉴于此,本申请实施例提供了一种地图轨迹平滑方法及装置,旨在使对地图轨迹进行的平滑处理达到更好的效果。
2、第一方面,本申请实施例提供了一种地图轨迹平滑方法,包括:
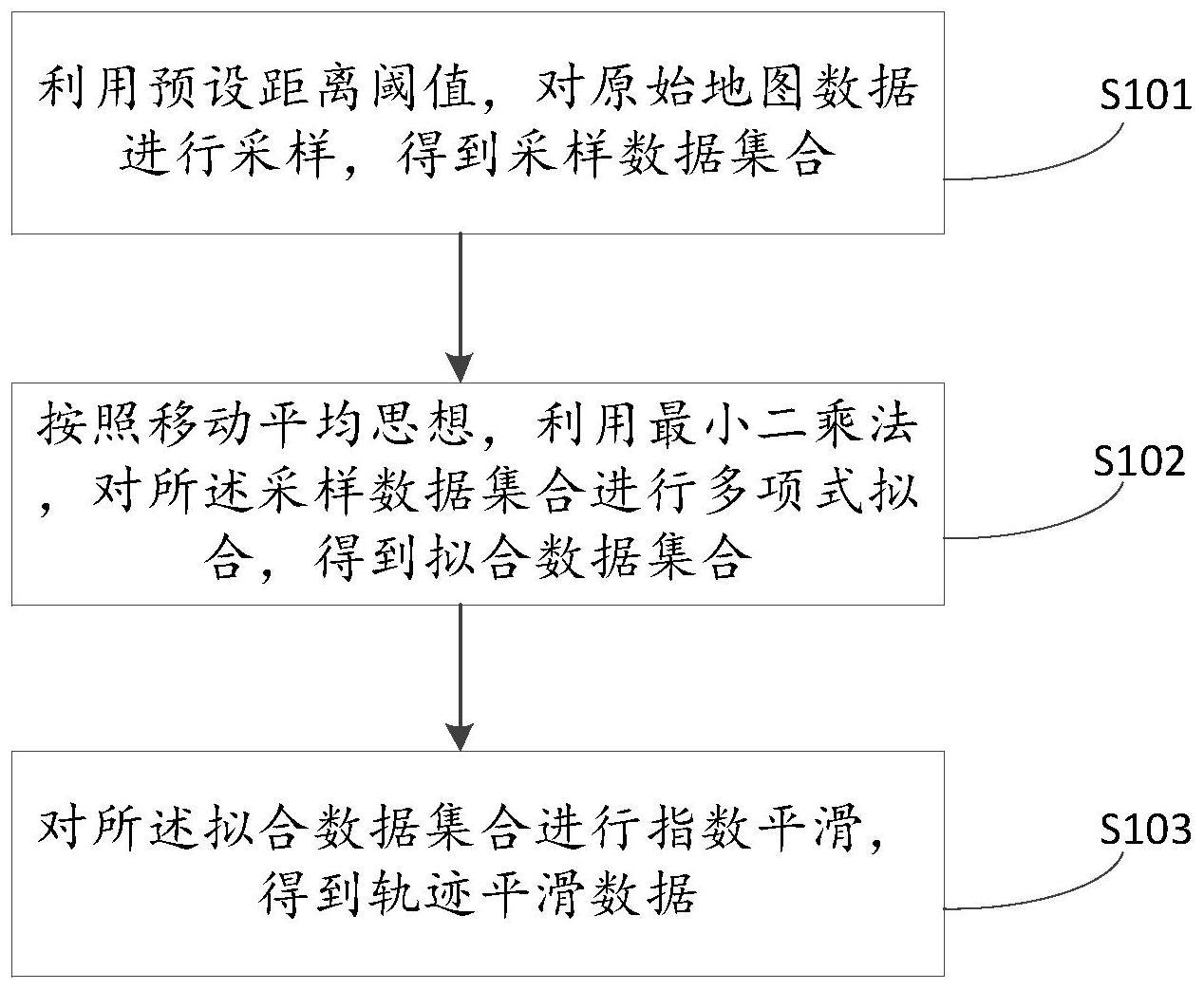
3、利用预设距离阈值,对原始地图数据进行采样,得到采样数据集合,所述预设距离阈值用于规定相邻两点之间的距离;
4、按照移动平均思想,利用最小二乘法,对所述采样数据集合进行多项式拟合,得到拟合数据集合;
5、对所述拟合数据集合进行指数平滑,得到轨迹平滑数据。
6、可选的,所述原始地图数据包括全球定位系统定位数据和实时动态载波相位差分定位数据。
7、可选的,所述按照移动平均思想,利用最小二乘法,对所述采样数据集合进行多项式拟合,得到拟合数据集合,包括:
8、设置平滑区间长度;
9、依据所述平滑区间长度,在所述采样数据集合中,选定第一移动数据集合;
10、利用最小二乘法,对所述第一移动数据集合进行多项式拟合,得到第一拟合数据;
11、依据所述平滑区间长度,在所述采样数据集合中,选定第二移动数据集合;
12、利用最小二乘法,对所述第二移动数据集合进行多项式拟合,得到第二拟合数据;
13、根据所述第一拟合数据和所述第二拟合数据,生成拟合数据集合。
14、可选的,所述利用最小二乘法,对所述第一移动数据集合进行多项式拟合,得到第一拟合数据,包括:
15、利用最小二乘法,获取所述第一移动数据集合进行多项式拟合的拟合参数;
16、利用所述第一移动数据集合进行多项式拟合的拟合参数,对所述第一移动数据集合进行多项式拟合,得到第一拟合数据。
17、可选的,所述利用最小二乘法,对所述第二移动数据集合进行多项式拟合,得到第二拟合数据,包括:
18、利用最小二乘法,获取所述第二移动数据集合进行多项式拟合的拟合参数;
19、利用所述第二移动数据集合进行多项式拟合的拟合参数,对所述第二移动数据集合进行多项式拟合,得到第二拟合数据。
20、可选的,所述对所述拟合数据集合进行指数平滑,得到轨迹平滑数据,包括:
21、对所述拟合数据集合进行加权平均,得到所述轨迹平滑数据。
22、第二方面,本申请实施例提供了一种地图轨迹平滑装置,包括:
23、采样模块,用于利用预设距离阈值,对原始地图数据进行采样,得到采样数据集合,所述预设距离阈值用于规定相邻两点之间的距离;
24、拟合模块,用于按照移动平均思想,利用最小二乘法,对所述采样数据集合进行多项式拟合,得到拟合数据集合;
25、平滑模块,用于对所述拟合数据集合进行指数平滑,得到轨迹平滑数据。
26、可选的,所述拟合模块,包括:
27、长度设定单元,用于设置平滑区间长度;
28、第一选定单元,用于依据所述平滑区间长度,在所述采样数据集合中,选定第一移动数据集合;
29、第一拟合单元,用于利用最小二乘法,对所述第一移动数据集合进行多项式拟合,得到第一拟合数据;
30、第二选定单元,用于依据所述平滑区间长度,在所述采样数据集合中,选定第二移动数据集合;
31、第二拟合单元,用于利用最小二乘法,对所述第二移动数据集合进行多项式拟合,得到第二拟合数据;
32、结果单元,用于根据所述第一拟合数据和所述第二拟合数据,生成拟合数据集合。
33、第三方面,本申请实施例提供了一种设备,所述设备包括存储器和处理器,所述存储器用于存储指令或代码,所述处理器用于执行所述指令或代码,以使所述设备执行前述第一方面任一项所述的地图轨迹平滑方法。
34、第四方面,本申请实施例提供了一种计算机存储介质,所述计算机存储介质中存储有代码,当所述代码被运行时,运行所述代码的设备实现前述第一方面任一项所述的地图轨迹平滑方法。
35、本申请实施例提供了一种地图轨迹平滑方法及装置,在执行所述方法时,先利用预设距离阈值,对原始地图数据进行采样,得到采样数据集合,所述预设距离阈值用于规定相邻两点之间的距离;再按照移动平均思想,利用最小二乘法,对所述采样数据集合进行多项式拟合,得到拟合数据集合;最后,对所述拟合数据集合进行指数平滑,得到轨迹平滑数据。这样,采用移动平均的思想,进行逐步平滑,可以对数据进行最佳的函数匹配,确保拟合曲线对数据的真实表达,能反馈数据的综合趋势,使制作完成的地图提供的定位数据更加平滑和准确,大大地提高了智能驾驶车辆运行的平稳性。
技术特征:
1.一种地图轨迹平滑方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述原始地图数据包括全球定位系统定位数据和实时动态载波相位差分定位数据。
3.根据权利要求1所述的方法,其特征在于,所述按照移动平均思想,利用最小二乘法,对所述采样数据集合进行多项式拟合,得到拟合数据集合,包括:
4.根据权利要求3所述的方法,其特征在于,所述利用最小二乘法,对所述第一移动数据集合进行多项式拟合,得到第一拟合数据,包括:
5.根据权利要求3所述的方法,其特征在于,所述利用最小二乘法,对所述第二移动数据集合进行多项式拟合,得到第二拟合数据,包括:
6.根据权利要求1所述的方法,其特征在于,所述对所述拟合数据集合进行指数平滑,得到轨迹平滑数据,包括:
7.一种地图轨迹平滑装置,其特征在于,所述装置包括:
8.根据权利要求7所述的装置,其特征在于,所述拟合模块,包括:
9.一种设备,其特征在于,所述设备包括存储器和处理器,所述存储器用于存储指令或代码,所述处理器用于执行所述指令或代码,以使所述设备执行权利要求1至6任一项所述的地图轨迹平滑方法。
10.一种计算机存储介质,其特征在于,所述计算机存储介质中存储有代码,当所述代码被运行时,运行所述代码的计算机存储设备实现权利要求1至6任一项所述的地图轨迹平滑方法。
技术总结
本申请提供了一种地图轨迹平滑方法及装置,包括:利用预设距离阈值,对原始地图数据进行采样,得到采样数据集合,所述预设距离阈值用于规定相邻两点之间的距离;按照移动平均思想,利用最小二乘法,对所述采样数据集合进行多项式拟合,得到拟合数据集合;对所述拟合数据集合进行指数平滑,得到轨迹平滑数据。采用移动平均的思想,进行逐步平滑,可以对数据进行最佳的函数匹配,确保拟合曲线对数据的真实表达,能反馈数据的综合趋势,使制作完成的地图提供的定位数据更加平滑和准确,大大地提高了智能驾驶车辆运行的平稳性。
技术研发人员:梁高洋,罗杰,张立成,钟声峙,杨喆
受保护的技术使用者:柳州五菱新能源汽车有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!