一种同面电容传感器的传感深度的获取方法及获取系统与流程
本发明涉及无损检测,尤其涉及一种同面电容传感器的传感深度的获取方法及获取系统。
背景技术:
1、同面电容传探测技术是一种由电容层析成像(electrical capacitancetomography,ect)发展而来的新型无损检测(new non-destructive testing,ndt)技术。同面电容传感器在继承ect成本低、反应快、无辐射、非侵入性等优点基础上,提供了更为灵活的电极设计和单面检测的能力。同面电容探测技术已经在如复合材料损伤、水分含量、表面缺陷和混凝土探伤等无损检测领域显示出广阔的研究价值和应用的潜力。
2、传感深度(又称穿透深度)是衡量同面电容传感器有效检测距离的一个重要指标,是影响同面电容传感器性能的关键因素之一。然而,由于边缘电场的复杂性和参数设计的多样性,目前同面电容传感器的传感深度没有统一的获取标准。
3、目前的传感深度的获取方法包括三种:(1)将传感器中心的电场强度衰减接近于零的位置定义为传感深度;(2)在传感器上放置逐渐增厚的测试样品,将测试样品引起的电容变化量接近最大值的97%对应的高度定义为传感深度;(3)在传感器上放置厚度固定的薄板测试样品,将逐步升高样品所引起变化量接近最大值3%的高度定义为传感深度。其中,上述三种方法分别存在一定的缺陷,具体而言,第(1)种方法只关注了传感器的中心电场强度,没有考虑到传感器测量域的其他位置,考察不够全面,同时,由于电场强度为矢量,具有方向性,测量域的各个位置的电场强度的方向不是保持一致的,因此根据电场强度无法全面地获取传感深度,从而无法有效地衡量传感器的有效检测距离。第(2)种方法和第(3)种方法均是通过测试样品进行实验获取传感深度,其中,第(2)种方法在样品制备和实验操作难度较大,第(3)种方法借助于位移平台较为容易实现,但是,由于测试样品(尺寸、材料等)和实验条件(位移精度、电容测量精度等)差异,导致通过第(2)种方法和第(3)方法等实验法所获得的传感深度的结果不一致,缺乏统一性,因此根据实验法确定传感深度无法有效地衡量传感器的有效检测距离。
4、因此,提出一种可以克服上述缺点的同面阵列传感器的传感深度的获取方法对同面电容探测技术的研究和发展至关重要。
技术实现思路
1、鉴于上述的分析,本发明实施例旨在提供一种同面电容传感器的传感深度的获取方法及获取系统,用以解决现有的方法因考虑不全面或结果不一致导致获取的传感深度无法有效地衡量同面电容传感器的有效检测距离的技术问题。
2、一方面,本发明实施例提供了一种同面电容传感器的传感深度的获取方法,所述方法包括:
3、根据目标传感器的测量域的灵敏度数据在深度方向上的变化获取所述目标传感器的传感深度;
4、其中,所述深度方向为远离且垂直于所述目标传感器的表面的方向。
5、基于上述方法的进一步改进,所述灵敏度数据包括:所述测量域的不同深度的面层分别对应的平均灵敏度,
6、其中,每个深度的所述面层对应的平均灵敏度为该面层的指定区域中的所有位置的灵敏度的平均值。
7、基于上述方法的进一步改进,所述指定区域为所述面层上的部分或全部区域。
8、基于上述方法的进一步改进,所述方法包括如下步骤:
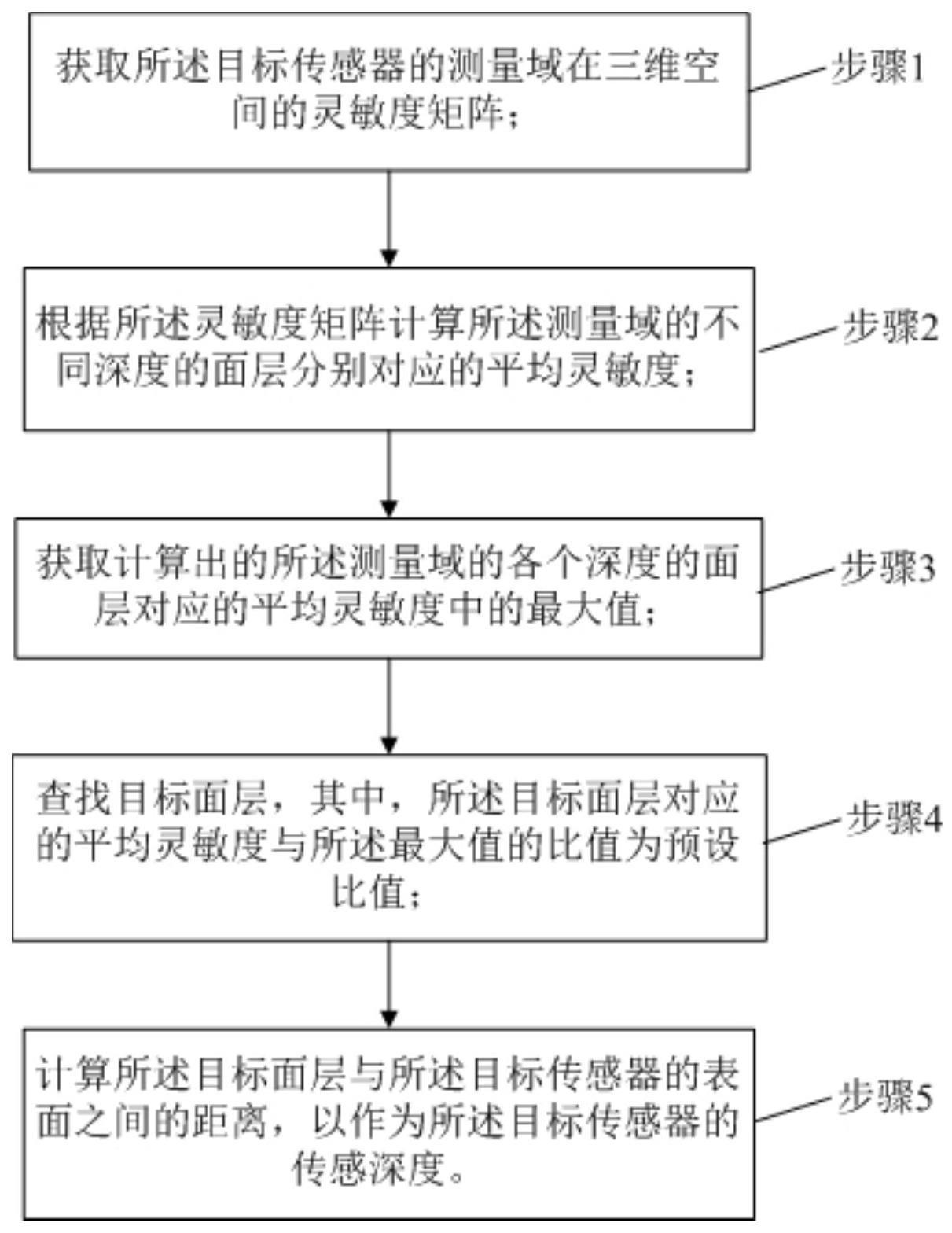
9、获取所述目标传感器的测量域在三维空间的灵敏度矩阵;
10、根据所述灵敏度矩阵计算所述测量域的不同深度的面层分别对应的平均灵敏度;
11、获取计算出的所述测量域的各个深度的面层对应的平均灵敏度中的最大值;
12、查找目标面层,其中所述目标面层对应的平均灵敏度与所述最大值的比值为预设比值;
13、计算所述目标面层与所述目标传感器的表面之间的距离,以作为所述目标传感器的传感深度。
14、基于上述方法的进一步改进,所述预设比值为2%至5%。
15、基于上述方法的进一步改进,对所述目标传感器的测量域在三维空间上进行有限元网格划分,并基于有限元分析法获取所述目标传感器的测量域在三维空间的灵敏度矩阵。
16、基于上述方法的进一步改进,所述灵敏度矩阵根据如下公式计算:
17、
18、式中,s为灵敏度矩阵;为第一电极激励且第二电极接地时的测量域的电势分布;为第二电极激励且第一电极接地时的测量域的电势分布;v1为第一电极激励时的电压;v2为第二电极激励时的电压;i、j和k分别为测量域在x方向、y方向和z方向的划分总数量,i、j和k分别为求解单元的x方向、y方向和z方向的坐标;
19、其中,第一电极和第二电极分别为目标传感器的任意的电极对中的两个电极;z方向为所述深度方向,x方向、y方向为垂直于所述z方向的两个方向,并且x、y和z满足右手定则。
20、基于上述方法的进一步改进,所述测量域的各层的平均灵敏度根据如下公式计算:
21、
22、式中,mk为第k层对应的平均灵敏度,s(i,j,k)为坐标为(i,j,k)的求解单元对应的灵敏度,i0和i1分别为第k层的指定区域在x方向的起点坐标和终点坐标,j0和j1分别为第k层的指定区域在y方向的起点坐标和终点坐标。
23、基于上述方法的进一步改进,对所述目标传感器的测量域在三维空间上进行有限元网格划分,包括:
24、对所述目标传感器的测量域在三维空间上进行六面体网格划分。
25、另一方面,本发明的实施例提供了一种同面电容传感器的传感深度的获取系统,所述获取系统包括:
26、第一求解模块,其用于获取所述目标传感器的测量域在三维空间的灵敏度矩阵;
27、第一计算模块,其根据所述灵敏度矩阵计算所述测量域的各个所述高度层对应的平均灵敏度;
28、查找模块,其用于获取计算出的所有所述高度层对应的平均灵敏度中的最大值,以及查找目标面层,其中所述目标面层对应的平均灵敏度与所述最大值的比值为预设比值;
29、第二计算模块,其用于计算所述目标面层与所述目标传感器的表面之间的距离,以作为所述目标传感器的传感深度。
30、与现有技术相比,本发明至少可实现如下有益效果之一:
31、1、本发明中根据目标传感器的测量域的灵敏度数据在深度方向上的变化获取传感深度,由于灵敏度数据具有唯一性,不依赖于测试样品和实验条件,因此能够解决因测试样品和/或实验条件的差异导致获取的传感深度的结果不一致的问题,保证获取结果的一致性,从而根据本发明的方法所获取的传感深度能够有效地衡量目标传感器的有效检测距离,准确地反应目标传感器的性能,同时能够为同面电容传感器的传感深度的获取标准的统一化提供参考。
32、2、本发明中,通过测量域的各个深度的面层对应的平均灵敏度在深度方向上的变化确定目标传感器的传感深度,获取的传感深度能够充分地考虑到测量域的不同位置,避免因考虑不全面而导致获取的传感深度无法有效地衡量传感器的有效检测距离,从而能够准确地反应传感器的性能。
33、本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!