一种改进的容积卡尔曼在低轨机会信号定位中的应用方法
本发明涉及机会信号导航与定位领域,具体涉及一种改进的容积卡尔曼在低轨机会信号定位中的应用方法。本发明是卡尔曼滤波在低轨机会信号定位领域的一个应用,针对最小二乘法在线性化过程中带来的误差,提出利用改进的容积卡尔曼滤波的思想来进行多普勒定位解算。
背景技术:
1、在全球导航卫星系统(globalnavigationsatellitesystem, gnss)失效的情况下,可以考虑利用蓝牙、超宽带等机会信号来对目标进行导航和定位,但是对于沙漠、海洋以及空天区域,上述机会信号的覆盖范围往往不够,而低轨(lowearthorbit, leo)卫星信号作为机会信号的一种,不仅可以承担导航定位的职责,而且多颗低轨卫星组成的星座具备覆盖全球的能力。
2、leo卫星运行速度快,具有较大的多普勒频差和较高的可见星几何位置多样性,因此基于leo卫星的定位以多普勒频率定位为主, 基于低轨机会信号的多普勒频移特性对目标进行定位,是一种非常有效的辅助gnss定位的手段。
3、目前常用的解算方法是基于最小二乘的思想同时结合牛顿迭代法,建立多普勒定位方程组,利用解析法进行求解。但是在解算过程中一般都是采用泰勒级数展开,保留线性的部分,这就带来了一定的误差。同时由于多普勒定位表达式稍显复杂,求解雅克比矩阵时提升了整体的计算复杂度。
4、容积卡尔曼滤波(cubaturekalmanfilter, ckf)是目前最接近贝叶斯滤波的近似算法,它通过三阶球面径向容积准则来近似状态的后验均值和协方差,以保证在理论上以三阶多项式逼近非线性高斯状态的后验均值和方差。同时以计算并传播容积点的方式来代替雅可比矩阵的求解,也降低了算法的计算复杂度。
5、但是ckf也存在一定的缺陷,在实际的定位中,由于环境的复杂多变以及测量设备自身存在问题,导致直接使用容积卡尔曼滤波求解会带来较大的误差,因此需要对其做出一些改进。基于此,特提出本发明。
技术实现思路
1、为了解决现有技术中存在的上述问题,本发明提出一种基于改进的容积卡尔曼在低轨机会信号定位中的应用方法,以减小最小二乘法在线性化过程中带来的误差。
2、本发明的技术方案为:一种基于改进的容积卡尔曼在低轨机会信号定位中的应用方法,在容积卡尔曼滤波算法中加入自适应滤波的部分,修正过程噪声的统计特性;以svd分解代替cholesky分解,避免协方差矩阵的正定性要求;引入抗差因子,减小异常观测值对定位精度的影响;在输出结果前计算定位误差,如果超过一定阈值,则引入渐消因子,增大当前历元观测值的权重,然后继续计算状态量的误差协方差预测值,输出结果;如果定位误差不超出阈值,则直接输出结果。
3、进一步地,自适应滤波时,采用加窗法结合指数衰减的思想来计算过程噪声的统计特性。
4、进一步地,所述svd分解的通式为:
5、
6、其中,a为任何m×n的矩阵,u为a的左奇异矩阵,为a的奇异值矩阵,v为a的右奇异矩阵,上标t表示矩阵转置。
7、进一步地,所述抗差因子用于调节测量矩阵,减少异常值对定位精度的影响,其表达式为
8、 ,
9、其中,和代表常数,一般情况下的取值范围是1.5~2.0,的取值范围是3.0~8.5;表示标准化抗差。
10、进一步地,所述渐消因子为不小于1的参数。
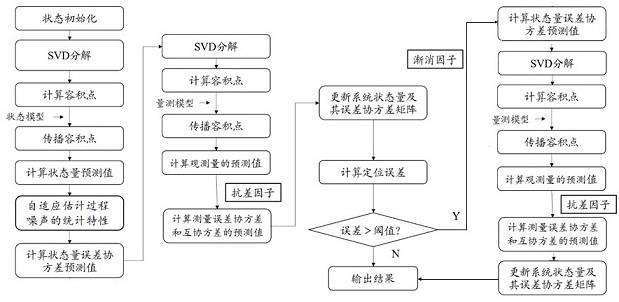
11、进一步地,所述基于改进的容积卡尔曼在低轨机会信号定位中的应用方法,包括如下的步骤:
12、step1:状态初始化;
13、step2:对协方差矩阵进行svd分解;
14、step3:计算容积点;
15、step4:传播容积点并计算状态量的预测值;
16、step5:自适应估计过程噪声的统计特性;
17、step6:计算状态量的误差协方差预测值;
18、step7:对协方差矩阵进行svd分解;
19、step8:计算容积点;
20、step9:传播容积点并计算观测量的预测值;
21、step10:加入抗差因子,计算测量误差协方差和互协方差的预测值;
22、step11:计算卡尔曼增益,并获得状态量和对应的误差协方差的最终估计值。
23、进一步地,还包括step12:计算定位误差,如果误差>阈值,则引入渐消因子,返回step6,重新计算,输出新的状态量估计值;如果误差≤阈值,则输出step11中的状态量估计值。
24、本发明的优点在于:1、针对环境的复杂多变以及测量设备自身存在问题,通过在ckf中加入自适应滤波的部分,修正过程噪声的统计特性;2、以svd分解代替cholesky分解,避免协方差矩阵的正定性要求;3、加入抗差因子,减小异常观测值对定位精度的影响;4、当定位误差超过一定阈值时引入渐消因子,以获得误差小于阈值的状态量估计值。
技术特征:
1.一种改进的容积卡尔曼在低轨机会信号定位中的应用方法,其特征在于,在容积卡尔曼滤波算法中加入自适应滤波的部分,修正过程噪声的统计特性;以svd分解代替cholesky分解,避免协方差矩阵的正定性要求;引入抗差因子,减小异常观测值对定位精度的影响;在输出结果前计算定位误差,如果超过一定阈值,则引入渐消因子,增大当前历元观测值的权重,然后继续计算状态量的误差协方差预测值,输出结果;如果定位误差不超出阈值,则直接输出结果。
2.如权利要求1所述的一种改进的容积卡尔曼在低轨机会信号定位中的应用方法,其特征在于,自适应滤波时,采用加窗法结合指数衰减的思想来计算过程噪声的统计特性。
3.如权利要求1所述的一种改进的容积卡尔曼在低轨机会信号定位中的应用方法,其特征在于,所述svd分解的通式为:
4.如权利要求1所述的一种改进的容积卡尔曼在低轨机会信号定位中的应用方法,其特征在于,所述抗差因子用于调节测量矩阵,减少异常值对定位精度的影响,其表达式为
5.如权利要求1所述的一种改进的容积卡尔曼在低轨机会信号定位中的应用方法,其特征在于,所述渐消因子为不小于1的参数。
6.如权利要求1所述的一种改进的容积卡尔曼在低轨机会信号定位中的应用方法,其特征在于,包括如下的步骤:
7.如权利要求6所述的一种改进的容积卡尔曼在低轨机会信号定位中的应用方法,其特征在于,还包括step12:计算定位误差,如果误差>阈值,则引入渐消因子,返回step6,重新计算,输出新的状态量估计值;如果误差≤阈值,则输出step11中的状态量估计值。
技术总结
本发明涉及一种基于改进的容积卡尔曼在低轨机会信号定位中的应用方法,在容积卡尔曼滤波算法中加入自适应滤波的部分,修正过程噪声的统计特性;以SVD分解代替Cholesky分解,避免协方差矩阵的正定性要求;引入抗差因子,减小异常观测值对定位精度的影响;在输出结果前计算定位误差,如果超过一定阈值,则引入渐消因子,增大当前历元观测值的权重,然后继续计算状态量的误差协方差预测值,输出结果;如果定位误差不超出阈值,则直接输出结果。本发明可以减小最小二乘法在线性化过程中带来的误差。
技术研发人员:刘涵,方胜良,范有臣,温晓敏,马昭,徐照菁,程东航,王孟涛,胡豪杰,彭亮
受保护的技术使用者:中国人民解放军战略支援部队航天工程大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!