一种柔性可穿戴自供电可视化触觉传感器及其制备方法
【】本发明涉及可视化传感器,具体涉及一种柔性可穿戴自供电可视化触觉传感器及其制备方法。
背景技术
0、
背景技术:
1、可视化传感器具备信息获取、信号处理与传输的功能,因其方便人们实时获取传感信息而得到广泛关注,进而开发电、光、声音和视觉辅助等可视化方式。触觉信息的可视化传感在帮助用户获取实时有效信息方面具备独特的技术优势,而提供可见光反馈的触觉传感器在快速发展的可穿戴显示器、电子皮肤和生物医学等领域变得越来越重要。
2、近年来,已经开发了很多类型的光反馈触觉传感器,将触摸刺激转换为肉眼可见的光信号。例如中国专利202110837066.6公开了电致变色可视化压力传感器及其构建方法,包括依次连接的压力传感器部分、导电电极矩阵和电致变色显色窗口;所述压力传感器部分由银纳米线和聚二甲基硅氧烷弹性体复合而成;所述导电电极矩阵包括依次设置的粘附层和导电层;所述电致变色显色窗口包括导电纳米线层和电致变色材料层;该发明提供的压力可视化器件可精确量化压力大小且制备工艺简单,易于进行大规模量产。
3、总的来说,目前所报道的触摸可视化的方法主要包括热致变色、电致变色、力致发光和电致发光等。其中,变色类传感器变色机制切换速度缓慢,不能很快的响应压力,且变色一般只能在少数几种颜色之间变换,不能很好的量化压力。电致发光类触觉传感器依赖外部电源,这给便携性和集成带来了重大挑战。此外,一些报道通过摩擦接触起电与电致发光耦合实现了自供电可视化触觉传感,但该传感器只能在接触摩擦处产生光信号,同时光响应持续时间较短而难以被人所获取传感信息。
4、到目前为止,所提出的触觉可视化传感技术并不能兼容设备的便携性与可视化的灵活性,如何设计并开发一种光反馈直观且设备灵活的传感器仍是一项巨大的挑战。
技术实现思路
0、
技术实现要素:
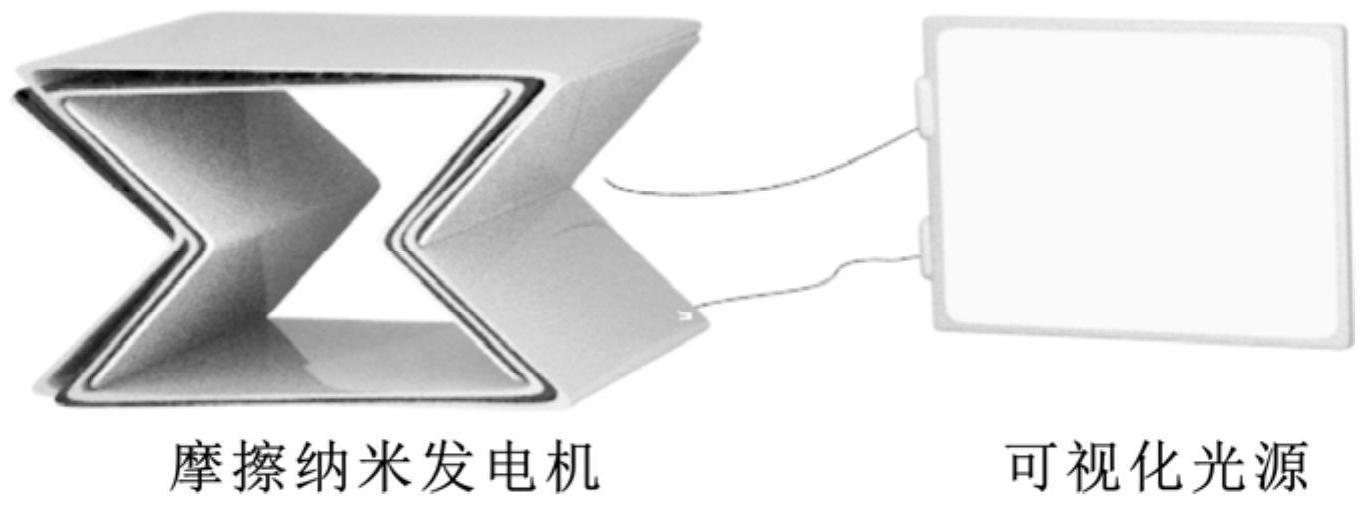
1、针对现有技术中的设备存在便携性与可视化灵活性较差的问题,本发明提供了一种柔性可穿戴自供电可视化触觉传感器及其制备方法,该传感器由摩擦纳米发电机和可视化光源组成。通过特殊结构设计的摩擦纳米发电机,可将触摸应力转换为高性能的电信号输出,并成功驱动可视化光源产生光信号,实现触摸可视化传感的过程。
2、本发明的目的通过以下技术方案来实现:
3、一种柔性可穿戴自供电可视化触觉传感器的制备方法,包括如下步骤:
4、1)采用机械搅拌的方式将壳聚糖溶解于质量浓度为1%的乙酸水溶液中,壳聚糖和质量浓度为1%的乙酸水溶液的质量比为1:20,然后倾倒至砂纸模具中,恒温热干燥成膜,得到壳聚糖薄膜;
5、2)将步骤1)得到的壳聚糖薄膜单面贴敷至导电电极表面上,用导线引出,得到正极摩擦层;
6、3)将负极摩擦电材料双面贴敷至电极表面上,用导线引出,得到负极摩擦层;
7、4)将步骤2)得到的正极摩擦层与步骤3)得到的负极摩擦层切割成定制尺寸后,将两片正极摩擦层分别对折后双面粘贴至负极摩擦层两侧,并采用导线将两片正极摩擦材料串联,然后用定制模具进行热塑成型,得到摩擦纳米发电机;
8、5)将步骤4)得到的摩擦纳米发电机的正极摩擦层和负极摩擦层的外接导线分别连接可视化光源的正负极,得到可穿戴柔性自供电可视化触觉传感器。
9、本发明中:
10、步骤1)所述的机械搅拌,是采用磁力搅拌,搅拌转速为1000r/min,搅拌时间为60min;所述的砂纸模具,目数为800-2000目,模具尺寸为10cm×10cm;所述的恒温热干燥,干燥温度为50℃,干燥时间为24h。
11、步骤2)、步骤3)所述的电极,选自导电胶、铜、银、金、铂、铝、镍中的一种,或者是含有导电胶、铜、银、金、铂、铝、镍的复合导电材料;所述的导线,选自铜丝、铝丝、银线、碳纤维线中的一种。
12、步骤3)所述的负极摩擦电材料,选自聚四氟乙烯、特氟龙、聚二甲基硅氧烷、聚酰亚胺中的一种,厚度为0.1-0.6mm。
13、步骤4)所述的定制尺寸,其中负极摩擦层是宽度为0.5cm-5cm、长度为2cm-40cm的矩形,正极摩擦层是宽度为1cm-10cm、长度为2cm-16cm的切角梯形;所述的定制模具为漏斗型缕空矩形模具,模具尺寸为0.1cm3-125cm3正立方体;所述的热塑成型,是采用恒温烘箱在80℃条件下加热5h。
14、步骤5)所述的可视化光源,选自直插式小功率led灯珠、smd贴片led灯珠中的一种。
15、本发明还涉及一种柔性可穿戴自供电可视化触觉传感器,采用上述一种柔性可穿戴自供电可视化触觉传感器的制备方法得到,所述的柔性可穿戴自供电可视化触觉传感器中摩擦纳米发电机输出功率密度最高达2.3w/cm2,其中开路电压最高达1327v,短路电流达53μa,转移电荷量达762nc;在不同的应力作用下,其在11.4kpa左右分别呈现2.93kpa-1和0.65kpa-1的传感灵敏度,传感的响应时间达54ms,并在10000次循环下输出性能变化率低于1%;在可视化反馈方面,通过手指按压传感器最高可产生12.8cd/m2的光强度。
16、和现有技术相比,本发明具有如下优点:
17、1、本发明所述的一种柔性可穿戴自供电可视化触觉传感器的制备方法,为解决现有传感器便携性与可视化灵活性较差的技术性问题,采用折叠技术和表面工程设计构建了高输出性能的摩擦纳米发电机,并将摩擦纳米发电机与可视化光源进行连接,实现了手指按压直接驱动可视化光源的传感技术。
18、2、本发明所述的一种柔性可穿戴自供电可视化触觉传感器,所采用的主要材料为柔性基材,折叠技术同样保证了传感器的柔软性,满足可穿戴设备对柔性器件的要求。同时,传感器的大小可控,摩擦纳米发电机与可视化光源可独立安装,确保了传感器的灵活性。基于上述效果,该传感器具备自供电、柔性、可穿戴等特点,在未来智能机器人技术与健康管理设备方面具备广阔应用前景。
技术特征:
1.一种柔性可穿戴自供电可视化触觉传感器的制备方法,其特征在于:包括如下步骤:
2.根据权利要求1所述的一种柔性可穿戴自供电可视化触觉传感器的制备方法,其特征在于:步骤1)所述的机械搅拌,是采用磁力搅拌,搅拌转速为1000r/min,搅拌时间为60min;所述的砂纸模具,目数为800-2000目,模具尺寸为10cm×10cm;所述的恒温热干燥,干燥温度为50℃,干燥时间为24h。
3.根据权利要求1所述的一种柔性可穿戴自供电可视化触觉传感器的制备方法,其特征在于:步骤2)、步骤3)所述的电极,选自导电胶、铜、银、金、铂、铝、镍中的一种,或者是含有导电胶、铜、银、金、铂、铝、镍的复合导电材料;所述的导线,选自铜丝、铝丝、银线、碳纤维线中的一种。
4.根据权利要求1所述的一种柔性可穿戴自供电可视化触觉传感器的制备方法,其特征在于:步骤3)所述的负极摩擦电材料,选自聚四氟乙烯、特氟龙、聚二甲基硅氧烷、聚酰亚胺中的一种,厚度为0.1-0.6mm。
5.根据权利要求1所述的一种柔性可穿戴自供电可视化触觉传感器的制备方法,其特征在于:步骤4)所述的定制尺寸,其中负极摩擦层是宽度为0.5cm-5cm、长度为2cm-40cm的矩形,正极摩擦层是宽度为1cm-10cm、长度为2cm-16cm的切角梯形;所述的定制模具为漏斗型缕空矩形模具,模具尺寸为0.1cm3-125cm3正立方体;所述的热塑成型,是采用恒温烘箱在80℃条件下加热5h。
6.根据权利要求1所述的一种柔性可穿戴自供电可视化触觉传感器的制备方法,其特征在于:步骤5)所述的可视化光源,选自直插式小功率led灯珠、smd贴片led灯珠中的一种。
7.一种柔性可穿戴自供电可视化触觉传感器,其特征在于:采用权利要求1-6任一项所述的一种柔性可穿戴自供电可视化触觉传感器的制备方法得到,所述的柔性可穿戴自供电可视化触觉传感器中摩擦纳米发电机输出功率密度最高达2.3w/cm2,其中开路电压最高达1327v,短路电流达53μa,转移电荷量达762nc;在不同的应力作用下,其在11.4kpa分别呈现2.93kpa-1和0.65kpa-1的传感灵敏度,传感的响应时间达54ms,并在10000次循环下输出性能变化率低于1%;在可视化反馈方面,通过手指按压传感器最高产生12.8cd/m2的光强度。
技术总结
本发明公开了一种柔性可穿戴自供电可视化触觉传感器及其制备方法,该传感器由摩擦纳米发电机和可视化光源组成,通过特殊结构设计的摩擦纳米发电机,可将触摸应力转换为高性能的电信号输出,并成功驱动可视化光源产生光信号,实现触摸自供电可视化传感的过程;该传感器具有柔性可穿戴、结构简单、体积较小的优势,无需外接电源并可独立工作,符合可穿戴设备对便携性的需求。此外,用于收集触摸能量的摩擦纳米发电机与可视化反馈的光源装置可独立装配,提升了自供电可视化传感器的安装灵活性。基于上述效果,该传感器具备自供电、柔性、可穿戴等特点,在未来智能机器人技术与健康管理设备方面具备广阔应用前景。
技术研发人员:陆登俊,刘涛,聂双喜,蔡晨晨
受保护的技术使用者:广西大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!