一种应对电离层闪烁的载波跟踪方法
1.本发明属于导航接收机的载波同步技术领域,尤其涉及一种应对电离层闪烁的载波跟踪方法。
背景技术:
2.全球导航卫星系统(gnss)为用户提供全天候、高精度的定位、导航和授时服务,广泛应用于社会生产生活各个领域。导航卫星通信接收机的大量使用正在挑战传统接收器架构的极限。传统的接收机最初设计用于在晴朗的天空、良性传播条件下工作,在恶劣的传播情况下,信号可能受到严重的高动态和电离层闪烁噪声的影响。传统的载波跟踪同步体系依赖于锁相环,但是在恶劣的传播条件下锁相环会因噪声抑制和动态跟踪能力的失衡而失锁,导致同步失败。
3.载波同步分为捕获和跟踪两个过程,载波跟踪主要是细化捕获阶段的参数的估计,过滤噪声并跟踪任何可能的时间变化。基于卡尔曼滤波的跟踪方法明显的解决了这种局限性。考虑到电离层闪烁噪声抑制的问题,卡尔曼滤波的主要缺点是在动态模型的选择上,只考虑了卫星与接收机之间的相对运动而产生的相位动力学,这导致了当前估计性能和抑制噪声干扰能力之间的矛盾,滤波器的设计应对时变的动态相位的能力强,将无法抑制传播效应,如电离层闪烁噪声;同时卡尔曼滤波在鉴相器输出处的测量噪声并不是白高斯,使相位估计精度受到了鉴相器非线性的限制,减弱了跟踪性能。
技术实现要素:
4.为解决上述问题,本发明提供一种应对电离层闪烁的载波跟踪方法,能够加强对时变相位的跟踪和对电离层闪烁噪声的抑制。
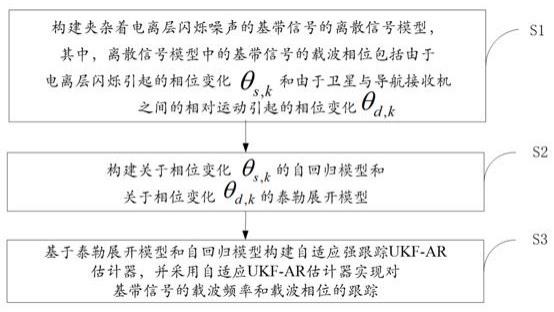
5.一种应对电离层闪烁的载波跟踪方法,包括以下步骤:s1:构建夹杂着电离层闪烁噪声的基带信号的离散信号模型,其中,离散信号模型中的基带信号的载波相位包括由于电离层闪烁引起的相位变化和由于卫星与导航接收机之间的相对运动引起的相位变化;s2:构建关于相位变化的自回归模型和关于相位变化的泰勒展开模型;s3:基于泰勒展开模型和自回归模型构建自适应强跟踪ukf-ar估计器,并采用自适应ukf-ar估计器实现对基带信号的载波频率和载波相位的跟踪。
6.进一步地,所述离散信号模型如下:其中,k为离散时间,为夹杂着电离层闪烁噪声的基带信号,为单位时间内累计输出的信号幅值,j为虚部,为基带信号的载波相位,且,为高斯测量噪声。
7.进一步地,所述自回归模型如下:
其中,为由于电离层闪烁引起的相位变化的时间序列,p为自回归模型的阶数,为自回归模型系数,为高斯白噪声;其中,自回归模型系数由yule-walker方程解算得到:其中,为时间序列的自相关函数,为高斯白噪声的方差。
8.进一步地,所述泰勒展开模型如下:其中,为随机初始相位,为载波多普勒频偏,为一阶频偏变化率,为(n-1)阶频偏变化率,ts为采样间隔时间,n为泰勒展开模型的阶数。
9.进一步地,采用ukf-ar估计器实现对基带信号的载波频率和载波相位的跟踪具体为:s31:构建ukf-ar估计器的状态向量如下:其中,t表示转置;s32:构建ukf-ar估计器的状态方程如下:其中,为sigma点,且i=0,1,2,
…
,2n,为状态转移矩阵,为sigma点经状态转移矩阵传播后的转移结果;其中,各sigma点的计算方法如下:其中,为k-1时刻的状态向量,为状态向量的协方差矩阵,n为状态向量中包含的状态数量,为设定的比例系数;状态转移矩阵的计算方法如下:状态转移矩阵的计算方法如下:
其中,为与泰勒展开模型相关的辅助矩阵,为与自回归模型相关的辅助矩阵;s32:构建强跟踪条件下状态预测协方差矩阵如下:其中,为时变衰落因子,为协方差矩阵的权值,为先验状态参量,为状态向量噪声协方差矩阵,其中,先验状态参量表示如下:其中,为状态向量的均值的权值;噪声协方差矩阵的计算方法如下:其中,为单边谱密度;s33:构建测量方程如下:其中,观测量,为基带信号同相分量的载波相位,为基带信号正交相分量的载波相位,,为高斯测量噪声的同相分量,为高斯测量噪声的正交相分量;s34:构建观测量协方差矩阵如下:其中,为非线性观测方程函数,为先验状态参量经过非线性观测方程函数处理后的非线性状态量,为非线性状态量的加权和,且,为测量噪声方差,且有:
其中,c为信号载噪比,erf( )为误差函数;s35:构建滤波增益如下:其中,为和互协方差矩阵,且有:s36:设定状态向量和状态向量协方差的更新规则如下:s36:设定状态向量和状态向量协方差的更新规则如下:其中,为更新后的状态向量,为更新后的状态向量协方差矩阵,为残差;s37:基于步骤s31~s36,采用自适应无迹卡尔曼滤波的方法实现对基带信号的载波频率和载波相位的跟踪。
10.进一步地,夹杂着电离层闪烁噪声的基带信号的获取方法为:接收机接收到的gnss信号分别以正弦的形式和余弦的形式剥离出载波,剥离出的载波分别作为同相采样数据和正交相采样数据,随后两组采样数据与码相关器作用剥离扩频码,再经过积分清零操作后,得到夹杂着电离层闪烁噪声的基带信号,其中,基带信号包括同相分量和正交相分量。
11.有益效果:1、本发明提供一种应对电离层闪烁的载波跟踪方法,采用自回归模型对电离层闪烁进行拟合估计,能够将传播效应减弱;针对卡尔曼滤波测量噪声非白高斯,考虑用非线性的无迹卡尔曼滤波来取代鉴相器和环路滤波器,能够加强对时变相位的跟踪和对电离层闪烁噪声的抑制。
12.2、本发明提供一种应对电离层闪烁的载波跟踪方法,采用强跟踪因子和用载噪比估计器自适应更新滤波增益的方法加强对时变相位的跟踪和对电离层闪烁噪声的抑制,能够降低电离层闪烁噪声造成的测量噪声统计特性对滤波的影响。
13.3、本发明提供一种应对电离层闪烁的载波跟踪方法,采用自适应无迹卡尔曼滤波的方法实现对基带信号的载波频率和载波相位的跟踪,能够更好地捕获由非线性变换引起的高阶矩,不容易出错。
附图说明
14.图1为一种应对电离层闪烁的载波跟踪方法的流程图;图2为电离层闪烁相位序列的偏相关系数;图3为电离层闪烁相位序列的自相关系数;图4为某场景下ar模型功率谱拟合情况示意图;图5为自适应强跟踪ukf-ar跟踪基带时变载波相位的总体流程图;图6为强跟踪衰落因子求解流程图。
具体实施方式
15.为了使本技术领域的人员更好地理解本技术方案,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述。
16.如图1所示,一种应对电离层闪烁的载波跟踪方法,包括以下步骤:s1:构建夹杂着电离层闪烁噪声的基带信号的离散信号模型,其中,离散信号模型中的基带信号的载波相位包括由于电离层闪烁引起的相位变化和由于卫星与导航接收机之间的相对运动引起的相位变化。
17.夹杂着电离层闪烁噪声的基带信号的获取方法为:接收机接收到的gnss信号分别以正弦的形式和余弦的形式剥离出载波,剥离出的载波分别作为同相采样数据和正交相采样数据,随后两组采样数据与码相关器作用剥离扩频码,再经过积分清零操作后,得到夹杂着电离层闪烁噪声的基带信号,其中,基带信号包括同相分量和正交相分量。
18.需要说明的是,电离层闪烁噪声是因为电离层的传播路径对gnss信号产生的扰动形成的,具体表现为振幅衰减和相位变化,可将gnss信号建模为:其中,和分别为发送的gnss信号和接收到的gnss信号的基带信号,为噪声项,表示闪烁噪声的随机过程,具有相应的包络和相位分量。
19.本发明的主要任务为电离层闪烁条件下的基带时变载波相位跟踪,在载波跟踪阶段的输入处,可以考虑简化并使用离散信号模型,具体的,本发明的夹杂着电离层闪烁噪声的基带信号的离散信号模型如下:其中,k为离散时间,为夹杂着电离层闪烁噪声的基带信号,为单位时间内累计输出的信号幅值,j为虚部,为基带信号的载波相位,且,相位变化和相位变化是相互独立的,为高斯测量噪声,且。
20.s2:构建关于相位变化的自回归模型和关于相位变化的泰勒展开模型。
21.需要说明的是,实验表明,莱斯分布可以用来模拟电离层闪烁的包络,同时能够保持与经验数据的密切拟合。本发明引入一种合成真实闪烁时间序列的方法,称为康奈尔闪烁模型方法。
22.康奈尔闪烁模型需要指定两个参数,闪烁强度()和相关性()闪烁强度用闪烁指数表示,一般来说,越高,越低,闪烁越严重。其中,图1为相位闪烁序列的偏相关系数和自相关系数,从图1中可得,自相关系数收敛为0,偏相关系数呈现出截断的特性,符合自回归模型(ar模型)规律。
23.进一步地,本发明的自回归ar(p)模型根据实际序列可建模为:其中,为由于电离层闪烁引起的相位变化的时间序列,p为自回归模型
的阶数,为自回归模型系数,为高斯白噪声;其中,自回归模型系数由yule-walker方程解算得到:其中,为时间序列的自相关函数,为高斯白噪声的方差。
24.例如,以图4为例,()时的相位闪烁序列可以建模为ar(3)模型。ar(3)模型根据实际序列可建模为:其中,高斯白噪声的方差为,为电离层闪烁引起的相位变化时间序列,系数以及噪声方差可以根据yule-walker方程进行求解。
25.相关参数计算如下:同理,为相位闪烁序列的自相关函数。
26.噪声方差计算如下:进一步地,对于卡尔曼滤波体系,载波相位由接收机动态应力引起的时变泰勒展开近似建模,泰勒展开的阶数由实际动态性决定。
27.本发明的相位变化的泰勒展开模型如下:其中,为随机初始相位,为载波多普勒频偏,为一阶频偏变化率,为(n-1)阶频偏变化率,ts为采样间隔时间,n为泰勒展开模型的阶数。
28.s3:基于泰勒展开模型和自回归模型构建自适应强跟踪ukf-ar估计器,并采用自适应ukf-ar估计器实现对基带信号的载波频率和载波相位的跟踪,如图5所示,具体包括以下步骤:s31:构建ukf-ar估计器的状态向量如下:其中,t表示转置;s32:构建ukf-ar估计器的状态方程如下:其中,为由矩阵的各列计算出的sigma点,且i=0,1,2,
…
,2n,为
状态转移矩阵,为sigma点经状态转移矩阵传播后的转移结果;其中,各sigma点的计算方法如下:其中,为k-1时刻的状态向量,为状态向量的协方差矩阵,n为状态向量中包含的状态数量,为设定的比例系数,其中和为常数值,根据实际情况进行设置;状态转移矩阵的计算方法如下:状态转移矩阵的计算方法如下:状态转移矩阵的计算方法如下:其中,为与泰勒展开模型相关的辅助矩阵,为与自回归模型相关的辅助矩阵;s32:为了解决ukf-ar方法的发散问题和应对接收信号发生的突变,采用加入时变衰落因子的强跟踪的方法提高状态跟踪性能,构建状态预测协方差矩阵如下:其中,为时变衰落因子,其计算过程如图6所示,为遗忘因子,为协方差矩阵的权值,,为先验状态参量,q为状态向量噪声协方差矩阵,其中,先验状态参量表示如下:其中,为状态向量的均值的权值,且;噪声协方差矩阵可表示为:其中,,实质上是泰勒级数余项,可近似计算为:
为的n阶导数,可建模为具有单边谱密度为的高斯白噪声。
29.综上:其中,为单边谱密度,为电离层闪烁ar拟合模型方差;s33:构建测量方程如下:其中,观测量,为基带信号同相分量的载波相位,为基带信号正交相分量的载波相位,,为高斯测量噪声的同相分量,为高斯测量噪声的正交相分量;s34:构建观测量协方差矩阵如下:其中,为非线性观测方程函数,为先验状态参量经过非线性观测方程函数处理后的非线性状态量,为非线性状态量的加权和,且,为测量噪声方差;需要说明的是,为了应对电离层闪烁强度过高的问题,iq两路的复包络浮动过大的问题,采用加入载噪比估计器的方法自适应调节滤波增益,减少由错误先验噪声引起的估计误差,测量噪声方差估计可表示为:其中,c为信号载噪比,erf(
·
)为误差函数;s35:构建滤波增益如下:其中,为和互协方差矩阵,且有:s36:设定状态向量和状态预测协方差的更新规则如下:
其中,为更新后的状态向量,为更新后的状态向量协方差矩阵,为残差,且;s37:基于步骤s31~s36,采用自适应无迹卡尔曼滤波的方法实现对基带信号的载波频率和载波相位的跟踪。
30.也就是说,本发明完成状态向量的更新后,再更新测量方程,并将更新后的测量噪声协方差加入到观测量协方差矩阵的求解中,通过的更新实现了自适应调节滤波增益,并对状态向量和协方差进行更新。
31.由此可见,本发明针对当前估计与抑制之间的矛盾,考虑将有关传播干扰的统计知识加入到系统模型中,采用ar模型对电离层闪烁进行拟合估计,因此能够将传播效应减弱;针对卡尔曼滤波测量噪声非白高斯,考虑用非线性的无迹卡尔曼滤波来取代鉴相器和环路滤波器,另外为了应对电离层闪烁噪声造成的测量噪声统计特性对滤波的影响,采用加入强跟踪因子和用载噪比估计器自适应更新滤波增益的方法加强对时变相位的跟踪和对电离层闪烁噪声的抑制。
32.当然,本发明还可有其他多种实施例,在不背离本发明精神及其实质的情况下,熟悉本领域的技术人员当然可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1