用于将动态对象配属给道路的车道的方法和存储介质与流程
本发明涉及一种用于在雷达测量的情况下,特别是在车辆中,将动态对象配属给道路的车道的方法。
背景技术:
1、现今将许多如下功能用于机动车中:这些功能使用雷达测量及由这些雷达测量所求取到的在道路上的对象。在这些对象中在动态对象与静态对象之间进行区分,动态对象是运动的(不仅是相对于车辆)而静态对象占据固定的位置。典型地,动态对象具有更大意义,因为动态对象在道路交通中代表其他车辆、行人等。静态对象大多代表基础设施,如交通标志牌、防护栏、导向柱(leitpfosten)、路灯、桥,但也包括停放的机动车。由这些能够确定车行道边缘。
2、典型地,对于这些功能而言,动态对象处于哪个车道上也具有意义,特别是如果这些动态对象是其他车辆。这种功能的一个示例是距离相关的速度调节——也称距离调节速度仪、自适应速度调节或英文adaptive cruise control(自适应巡航控制)(acc)——在该速度调节中,本车辆的速度根据与目标对象、例如处于该机动车前方的另一车辆的距离,和可选地根据其速度来调节。在此重要的是,该调节针对处于本车道上的动态目标对象,而非针对在其他车道、如对向车道上的动态对象来执行。对于这种功能,要求对动态对象的车道配属。
3、在一些系统中使用地图,并且本车辆定位于该地图中。因此确定该车辆处于该地图中的哪里。在此,为该车辆确定全局位置和全局姿态,由此求取该车辆的取向。然后,将这些动态对象投影到该地图中,最后通过该地图实现车道配属。由本车辆的位置和取向以及所测量到的、所考察的动态对象与本车辆的相对位置,能够确定该动态对象处于哪个车道上。因此将雷达测量数据与定位共同地融合。
4、在本车辆取向中的小错误已足以将动态对象预测到错误的车道上,特别是当对象离得很远时。作为示例,在车行道宽度为4m的情况下,对于100m距离外的车辆,在取向中的1.5°的错误已足以将该车辆配属给错误的车道。
技术实现思路
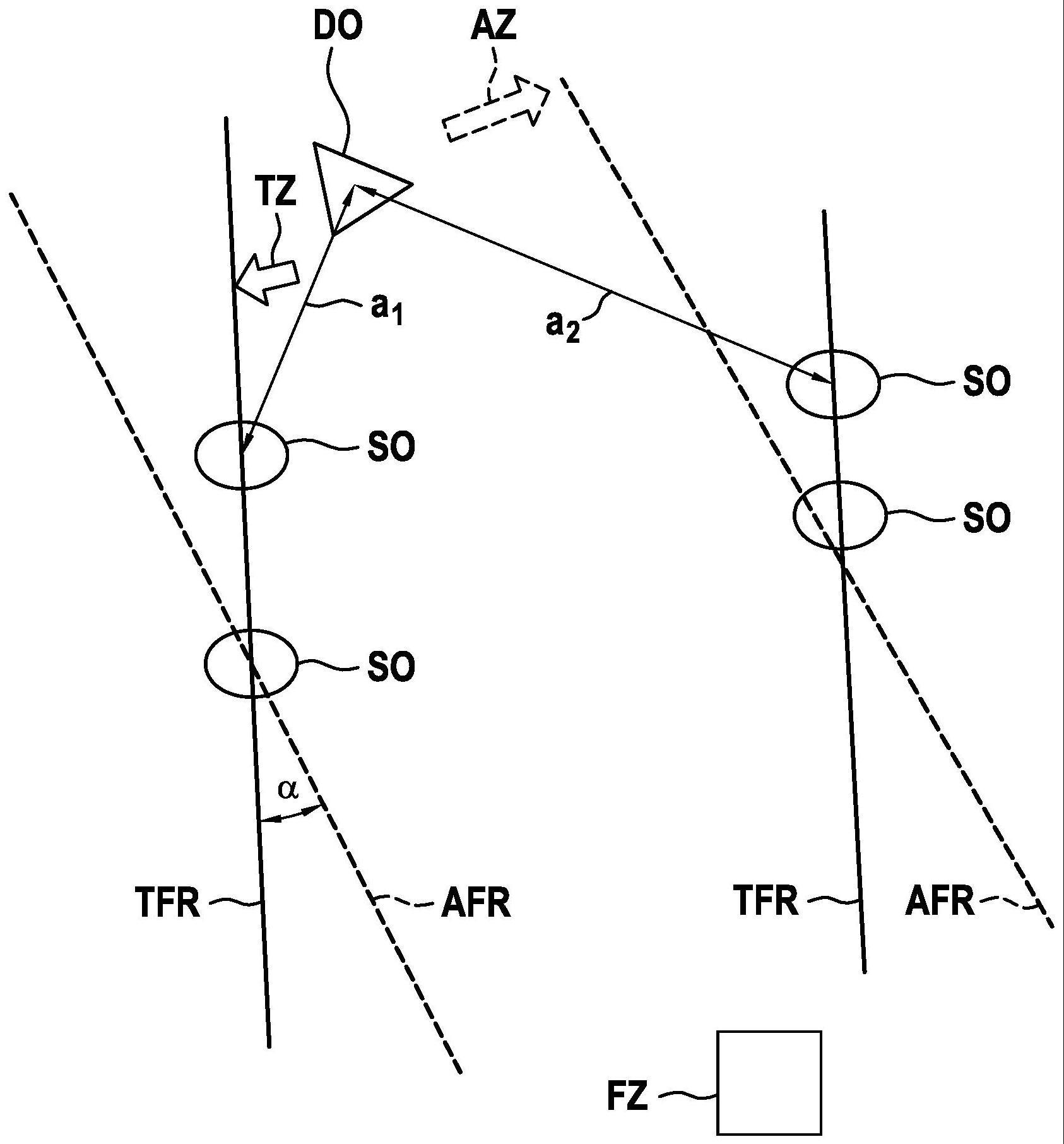
1、在用于将动态对象配属给道路的车道的该方法中,在对周围环境的雷达测量中检测对象,将这些对象划分为动态对象和静态对象,并根据所述静态对象求取车行道边缘。为该动态对象求取与标记该车行道边缘的至少一个静态对象的距离。然后将该距离用于为该动态对象执行车道配属。例如在双车道道路的情况下,将靠近右车行道边缘的动态对象配属给右车道,而将靠近左车行道边缘的动态对象配属给左车道。
2、因此,该方法中的对该动态对象的车道配属基于直接由雷达测量和在该雷达测量中所检测到的对象所获得的参量。通过所述距离将所述动态对象与根据所述静态对象所获得的车行道边缘相关联地置于同一参考系统中。因此,该距离不受涉及车辆的错误取向的错误的影响。其结果是,车道配属更可靠且不易受错误影响。功能、例如与距离相关的速度调节,现在能够使用带有车道配属的动态对象来替代来自雷达测量的动态对象。
3、对于该方法,车道配属也能够在不对车辆进行定位的情况下执行。如上文中所描述的那样,这些对象由对周围环境的雷达测量获得,并且能够借助基于启发的方法(启发式方法)被评估。
4、特别是,通过启发式方法根据所述静态对象求取车行道边缘。为此,可以将这些静态对象输入到地点固定的栅格中并且由此估计车行道边缘。在此,可以要么仅考虑这些静态对象的分布,要么还使用这些静态对象的走势(verlauf)与该车行道边缘之间的已知关联。
5、优选可以借助启发式方法来评估每个动态对象的车道配属。在此,能够估计至少一个车道中心。对于具有多个车道的宽道路,优选为每个车道估计车道中心。典型地能够根据两个车行道边缘之间的距离来以简单的方式估计该道路具有多少个车道。在此,单个车道的宽度大多与道路的类型,即例如高速公路、郊区道路、城镇道路,有关。在存在多义性的情况下——例如双车道高速公路与三车道郊区道路宽度相似——,可以优选在启发式方法中考虑另外的因素。一方面,可以考察动态对象的分布。若不能够明确地配属这些动态对象,则所估计的车道的数量和/或该道路的模型可能是错误的,而将另外的模型用于该道路、特别是具有不同车道数的模型。第二方面,可以考察本车辆的和/或其他动态对象的速度。自身速度高以及不存在具有与本车辆反向的速度的动态对象指示高速公路。第三方面,可以考察静态对象的分布。优选可以为此训练分类器,这些分类器基于这些静态对象的分布来对道路类型进行分类。现在,在车道配属中能够求取最邻近动态对象的车道中心。然后能够将该动态对象配属给具有该最邻近的车道中心的车道。该通过最邻近的车道中心进行的配属是一种简单的实现形式,特别是在具有多个车道的道路的情况下。
6、可选地可以设置,在预给定的时间段存储对象与车道的配属,并且当这些对象的配属在一定时间长度内连续地发生了变化时才执行新的车道配属。
7、这种启发式方法比对车辆进行更简单且成本更低地实现。由此能够将根据本发明的用于车道配属的方法实现在简单的系统中。此外,在应用启发式方法时不需要地图。
8、若存在地图,例如在进行定位的情况下,则以有利的方式能够在车道配属中使用来自该地图的附加信息。这些附加信息例如是车行道宽度、在车行道边缘与车道中心之间的距离等。替代或附加地也可以在该地图中标出在该车行道的边缘处的对象,这些对象在雷达测量中作为静态对象被测量。因此,在该地图中保存有简化车道配属的附加信息。
9、若设置有对车辆的定位,特别是如果所述定位对于其他驾驶功能是必需的,则优选在该定位期间进行根据该方法的车道配属。在该定位时要求前文中所描述的地图。以有利的方式能够如前文中所描述的那样使用所述附加信息。该定位的数据能够用于简化、精确化和/或加速车道配属。
10、所述计算机程序设置为用于执行该方法的每个步骤,特别是当该计算机程序在计算设备或控制器上执行时。该计算机程序使得能够实现该方法在传统的电子控制器中的实现,而不必在该控制器上进行结构上的改变。为此,该计算机程序存储在机器可读的存储介质上。
11、通过在传统的电子控制器上运行该计算机程序,获得根据本发明的电子控制器,该控制器设置为用于执行对动态对象的车道配属。
技术特征:
1.一种用于将动态对象(do)配属给道路的车道的方法,其中,在雷达测量(1)中检测对象(o、so、do),并将所述对象划分(2)为动态对象(do)和静态对象(so),并且根据所述静态对象(so)求取车行道边缘(afr),
2.根据权利要求1所述的方法,其特征在于,所述车道配属(50,51)通过启发式方法进行。
3.根据权利要求2所述的方法,其特征在于,通过启发式方法来估计至少一个车道中心,并且所述车道配属(50,51)根据所述动态对象(do)与所述车道中心之间的距离进行。
4.根据权利要求2或3所述的方法,其特征在于,根据所述静态对象(so)对所述车行道边缘(afr)所进行的求取通过启发式方法进行。
5.根据前述权利要求中任一项所述的方法,其特征在于,在对所述动态对象(do)进行所述车道配属(50,51)时使用来自地图(k)的附加信息。
6.根据前述权利要求中任一项所述的方法,其特征在于,在定位(3)期间进行对所述动态对象(do)的所述车道配属。
7.一种计算机程序,所述计算机程序设置为用于执行根据权利要求1至6中任一项所述的方法的每个步骤。
8.一种机器可读的存储介质,在所述存储介质上存储有根据权利要求7所述的计算机程序。
9.一种电子控制器,所述电子控制器设置为用于借助根据权利要求1至6中任一项所述的方法来执行对动态对象(do)的车道配属(50,51)。
技术总结
本发明涉及一种用于将动态对象(DO)配属给道路的车道的方法。在雷达测量(1)中检测对象(SO,DO),并将所述对象划分为动态对象(DO)和静态对象(SO)。根据所述静态对象(SO)求取车行道边缘(AFR)。根据动态对象(DO)与标记该车行道边缘(AFR)的至少一个静态对象(SO)的距离(a)来进行对该动态对象(SO)的车道配属(50,51)。
技术研发人员:M·克普
受保护的技术使用者:罗伯特·博世有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!