柔性滑觉传感器及其制备方法、触觉传感系统与应用
本技术属于传感,更具体地说,是涉及柔性滑觉传感器及其制备方法、触觉传感系统与应用。
背景技术:
1、触觉作为交互技术的基础,对智能机器人技术的发展具有重要的意义。柔性触觉传感器是实现机器人触觉感知的核心器件,赋予机器人与人、与物、与环境安全交互的能力。传统柔性触觉传感器的传感功能较为单一,主要以力传感为主,如通过对压力、剪切力、拉应力等机械刺激的检测,在抓取或操纵任务中更好地反馈机器人。对于人类而言,力感知是一种基本触觉功能,而滑觉是人类认识世界更为重要的触觉组成部分。如人类通过触摸布料可判断其纹理、材质或通过触摸来识别盲文。基于滑觉的外物识别能力是触觉的高阶形式,也是研究难点。传统柔性触觉传感器主要集中于提升力感知能力,缺乏对外物识别方面的研究,使机器人的触觉能力远不及人类皮肤。
2、人类识别外物的触觉能力主要依赖于表皮指纹结构和皮下组织中的机械感受器。指纹在滑动过程中与物体表面结构之间的相互作用产生复杂的机械刺激(包括振动、机械力、扭转等),而机械感受器主要检测这一刺激,不同表面引起的刺激频率及强度不同,以此实现对精细表面纹理的感知和区分。对于柔性触觉传感器而言,同时获得高灵敏度和极快响应速度的传感性能是其对物体纹理或粗糙度等精细特征识别所面临的主要挑战。高灵敏度保证柔性触觉传感器对微小结构的刺激产生响应,而极快的响应速度可精确检测表面微小结构间距产生的高频振动。除了对性能要求外,实现外物识别能力同时要求器件具有指纹结构——人工指纹,而传统触觉传感器难以同时兼顾这些特征,因此对物体的识别能力较远低于人类。
3、鉴于此,亟需发展一种柔性滑觉传感器,协助机器人识别外物,提高机器人的触觉能力。
技术实现思路
1、基于上述原因,本技术的一个目的在于提供一种柔性滑觉传感器,以解决现有技术中存在的亟需发展一种柔性滑觉传感器,协助机器人识别外物,提高机器人的触觉能力的技术问题。
2、本技术的另一个目的在于提供上述柔性滑觉传感器的准备方法。
3、本技术的再一目的在于提供上述柔性滑觉传感器的应用。
4、为实现上述目的,本技术采用的技术方案是:
5、提供一种柔性滑觉传感器,包括:
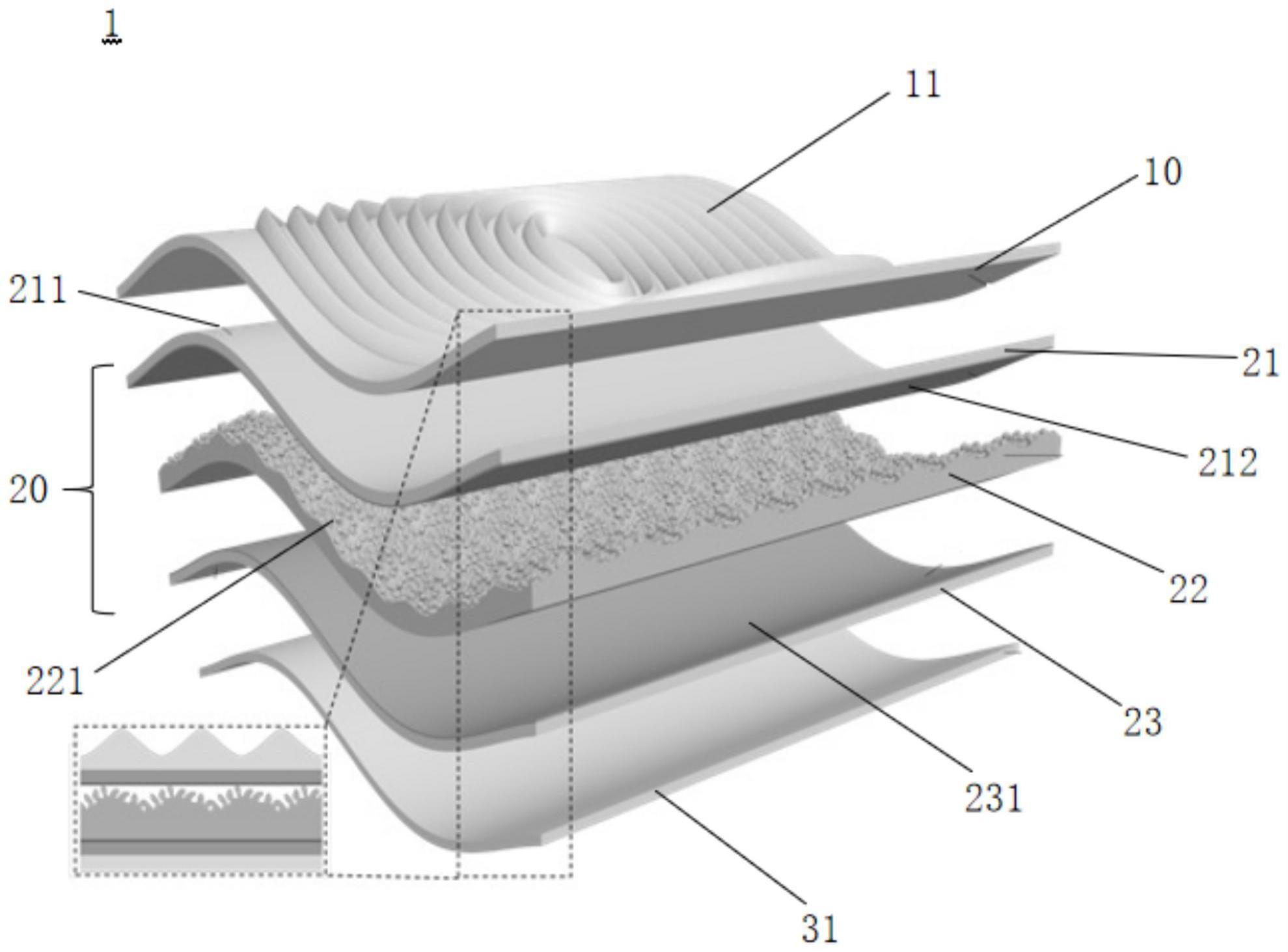
6、接触层,接触层的一面设有指纹结构;以及
7、压力传感组件,压力传感组件包括第一电极、离子膜和第二电极,离子膜夹设于第一电极和第二电极之间,离子膜用于分别与第一电极以及第二电极形成离子-电子界面的双电层电容;接触层附着于第一电极远离离子膜的一侧,并且指纹结构位于接触层远离第一电极的一面;指纹结构用于模仿人类指纹接触外物,捕捉交互过程中的机械刺激,并将机械刺激传递压力传感组件,压力传感组件对机械刺激产生响应,感知外物的纹理信息。
8、可选地,离子膜至少一面具有多级微结构,多级微结构包括至少两种尺寸的单元体积,或者多级微结构包括微穹顶阵列和多个次级微凸单元。
9、可选地,离子膜至少一面具有多级微结构,多级微结构包括微穹顶阵列和多个次级微凸单元,微穹顶阵列的周期为200-300μm,高度为40-55μm,次级微凸单元的周期为5-50μm;
10、和/或,离子膜的厚度为30-300μm。
11、可选地,指纹结构包括一个或多个条纹;条纹呈长条形或者环绕形成多个环形;
12、和/或,指纹结构包括一个或多个条纹,条纹环绕形成多个环形,条纹环绕形成的环形为封闭的环形,或者具有豁口的环形。
13、可选地,指纹结构的结构周期为150-500μm;
14、和/或,指纹结构包括若干凸起的凸起条纹,凸起条纹包括底部和脊尖,凸起条纹的截面宽度自底部向脊尖逐渐减小,凸起条纹的底部的截面宽度为150-500μm,凸起条纹的高度为100-400μm,凸起条纹的脊尖的截面宽度为3-55μm。
15、可选地,纹理信息包括周期为≥10μm的微结构;
16、和/或,制备接触层的材料包括以下组分中的至少一种:
17、聚甲基丙烯酸甲酯、聚苯乙烯、环氧树脂、聚二甲基硅氧烷(pdms)及脂肪族-芳香族无规共聚酯(ecoflex)。
18、以及,柔性滑觉传感器的制备方法,用于制备如上述的柔性滑觉传感器,制备方法包括以下步骤:
19、将接触层的原料混合液体浇注于指纹反模板中,进行固化处理,得到具有指纹结构的接触层;
20、将离子膜的原料混合液体浇注于微结构阵列反模板中,进行固化处理,得到具有多级微结构的离子膜;
21、提供第一电极和第二电极,将第一电极粘附于接触层远离指纹结构的一面,将离子膜夹设于第一电极与第二电极粘之间,得到柔性滑觉传感器。
22、可选地,将接触层的原料混合液体浇注于指纹反模板中,进行固化处理的方法包括以下步骤:
23、采用3d打印设备制备指纹反模板;
24、接触层的原料混合液体浇注于指纹反模板的表面,加热固化处理,得到具有指纹结构的接触层;
25、和/或,将离子膜的原料混合液体浇注于微结构阵列反模板中,进行固化处理的方法包括以下步骤:
26、采用3d打印设备制备微结构阵列反模板;
27、将离子膜的原料混合液体浇注于微结构阵列反模板的表面,室温干燥,得到表面分布多级微结构的离子膜。
28、以及,一种触觉传感系统,包括:
29、上述柔性滑觉传感器,柔性滑觉传感器用于触觉感知外物的纹理信息;
30、数字电路板,数字电路板用于采集柔性滑觉传感器感知到的纹理信息;
31、智能算法模块,智能算法模块用于分析纹理信息并将做出判断;以及
32、用户界面,用户界面用于显示智能算法模块分析的结果。
33、以及,上述触觉传感系统在智能机器中的应用。
34、本技术的有益效果在于:
35、1、本技术提供的柔性滑觉传感器的接触层用于接触外物,通过指纹结构在滑动过程中与物体表面结构之间的相互作用,产生复杂的机械刺激,例如振动、机械力、扭转等,然后将这些机械刺激传递至压力传感组件,产生可区分的电容响应,以此感知外物的纹理信息;离子膜分别与第一电极、第二电极构成离子-电子型双电层电容传感机制,使器件在外电场的作用下形成间距约1nm的离子-电子界面,可将电容信号强度提高约五个数量级;将指纹结构与离子-电子型双电层电容传感机制结合,使柔性滑觉传感器具有灵敏的外物识别(或纹理识别)能力,丰富器件的触觉;与现有技术相比,本技术柔性滑觉传感器引入指纹结构,并将传统电容型传感器中的介电层替换为离子膜,使柔性滑觉传感器具有灵敏的外物识别能力,可精确检测外物的微小结构;
36、2、本技术提供的柔性滑觉传感器的制备方法根据柔性滑觉传感器的结构特点进行制备,工序简单易控,可操作性强,利于工业推广;
37、3、本技术提供的触觉传感系统包括本技术的柔性滑觉传感器,将本技术提供的柔性滑觉传感器集成在智能机器上,建立触觉传感系统,实现智能机器对纹理的识别,提高其触觉感知能力。
- 还没有人留言评论。精彩留言会获得点赞!