基于双目相机的瞄准目标的方法、处理装置及激光跟踪仪与流程
本公开大体涉及智能制造装备产业,具体涉及一种基于双目相机的瞄准目标的方法、处理装置及激光跟踪仪。
背景技术:
1、激光跟踪仪,也被称为坐标测量装置,激光跟踪仪的工作基本原理是在待测点上安置一个目标(也可称为“反射器”或“靶球”),激光跟踪仪的激光跟踪头发出的激光束沿着激光跟踪仪的测量光轴发射到目标上,激光束被目标反射,并返回到激光跟踪头,当目标移动时,激光跟踪头调整激光束方向来瞄准目标。同时,返回的激光束被激光跟踪仪的检测系统所接收和识别,用来测算目标的空间位置。
2、专利文献(cn202210181257.6)公开了一种具有自动识别目标功能的坐标测量装置及其识别方法,在该专利文献中,单目相机系统获取目标反射的激光光束,形成目标光斑,并和初始光斑的像素差值计算出坐标测量装置需要调整的旋转角度,基于旋转角度控制单目相机旋转以使目标光斑的质心移动至初始光斑的质心,使激光跟踪仪的检测系统接收和识别到目标反射返回的激光束,其中初始光斑是目标位于预设位置时,目标反射的激光光束在单目相机系统形成的光斑。
3、然而,由于单目相机的瞄准光轴和激光跟踪仪的测量光轴不重合,导致单目相机的瞄准光轴与激光跟踪仪的测量光轴存在视差,激光跟踪仪在测量目标时的零点位置(零点位置也即目标位于激光跟踪仪的测量光轴时,返回的激光束在单目相机的成像元件上的预设位置)是与目标至单目相机的距离相关的,难以准确地获取零点位置,因此,无法基于零点位置准确地得到单目相机的旋转角度(也即激光跟踪仪发射出的激光束的旋转角度),从而无法使得瞄准光轴直接瞄准到目标。
技术实现思路
1、本公开有鉴于上述现有技术的状况而完成,其目的在于提供一种基于双目相机的瞄准目标的方法,用于提高激光跟踪仪瞄准目标的精度,同时提供了一种执行该方法的处理装置和激光跟踪仪。
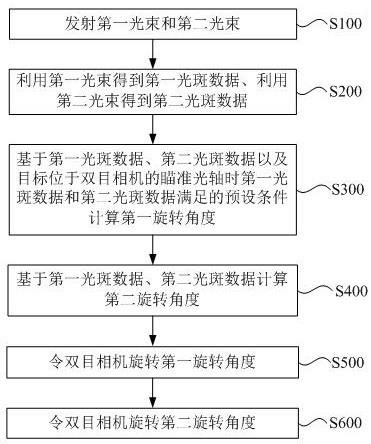
2、为此,本公开第一方面提供一种基于双目相机的瞄准目标的方法,是令所述双目相机的瞄准光轴瞄准目标的方法,其特征在于,所述双目相机包括用于发射第一光束的第一光源、用于发射第二光束的第二光源、第一采集单元、以及第二采集单元,所述方法包括:发射第一光束和第二光束;利用所述第一采集单元获取所述目标反射的第一光束并得到第一光斑数据,所述第一光斑数据包括沿第一方向的第一分量和沿第二方向的第二分量,利用所述第二采集单元获取所述目标反射的第二光束并得到第二光斑数据,所述第二光斑数据包括沿所述第一方向的第三分量和沿所述第二方向的第四分量;基于所述第一分量、所述第三分量、以及所述目标位于所述瞄准光轴时所述第一分量和所述第三分量满足的预设条件计算第一旋转角度;基于所述第二分量和所述第四分量计算第二旋转角度;令所述双目相机以所述双目相机的旋转中心为中心点沿所述第一方向旋转所述第一旋转角度;令所述双目相机以所述双目相机的旋转中心为中心点沿所述第二方向旋转所述第二旋转角度。
3、本公开涉及的基于双目相机的瞄准目标的方法,能够通过第一光源发射第一光束,第二光源发射第二光束,目标能够接收到第一光束和第二光束,并能够反射第一光束和第二光束,双目相机的第一采集单元能够获取目标反射的第一光束,并能够得到第一光束的第一光斑数据,双目相机的第二采集单元能够获取目标反射的第二光束,并能够得到第二光束的第二光斑数据,基于第一光斑数据、第二光斑数据以及目标位于双目相机的瞄准光轴时第一光斑数据和第二光斑数据满足的预设条件能够计算得出在双目相机瞄准目标过程中需要以旋转中心为中心点沿第一方向旋转的第一旋转角度,基于第一光斑数据和第二光斑数据能够计算得出在双目相机瞄准目标过程中需要以旋转中心为中心点沿第二方向旋转的第二旋转角度,由此,能够通过令双目相机旋转第一旋转角度及令双目相机旋转第二旋转角度,从而使双目相机瞄准目标,换言之,能够使目标位于双目相机的瞄准光轴上。
4、另外,在本公开第一方面所涉及的方法中,可选地,所述第一采集单元具有第一透镜和用于获取所述第一光斑数据的第一成像元件,所述第二采集单元具有第二透镜和用于获取所述第二光斑数据的第二成像元件。在这种情况下,第一光束能够经目标反射至第一透镜,穿过第一透镜在第一成像元件上聚集成像,第二光束能够经目标反射至第二透镜,穿过第二透镜在第二成像元件上聚集成像,由此,第一成像元件能够基于反射的第一光束获取第一光斑数据,第二成像元件能够基于反射的第二光束获取第二光斑数据。
5、另外,在本公开第一方面所涉及的方法中,可选地,基于所述第一成像元件建立第一坐标系,所述第一坐标系的横轴方向为所述第一方向,所述第一坐标系的纵轴方向为所述第二方向,基于所述第二成像元件建立第二坐标系,所述第二坐标系的横轴方向为所述第一方向,所述第二坐标系的纵轴方向为所述第二方向,所述第一方向为水平方向,所述第二方向为竖直方向。在这种情况下,能够将第一光斑数据在第一坐标系中分解为沿第一方向的第一分量和沿第二方向的第二分量,能够将第二光斑数据在第二坐标系中分解为沿第一方向的第三分量和沿第二方向的第四分量,由此,便于对第一光斑数据和第二光斑数据进行计算。
6、另外,在本公开第一方面所涉及的方法中,可选地,所述第一光源的数量为多个,多个所述第一光源围绕所述第一采集单元布置,所述第一光斑数据为基于多个所述第一光源发射的多个第一光束经所述目标反射并被所述第一采集单元获取的多个光斑获得的光斑数据;所述第二光源的数量为多个,多个所述第二光源围绕所述第二采集单元布置,所述第二光斑数据为基于多个所述第二光源发射的多个第二光束经所述目标反射并被所述第二采集单元获取的多个光斑获得的光斑数据。在这种情况下,由于多个第一光源围绕第一采集单元布置,第一采集单元获取的多个第一光源所形成的光斑也呈围绕状,利用多个光斑的联合重心计算第一光斑数据,能够获得一个精度较高的第一光斑数据。同时,由于多个第二光源围绕第二采集单元布置,第二采集单元获取的多个第二光源所形成的光斑也呈围绕状,利用多个光斑的联合重心计算第二光斑数据,能够获得一个精度较高的第二光斑数据,由此,不仅能够简化计算,还能够提高计算精度。
7、另外,在本公开第一方面所涉及的方法中,可选地,所述方法还包括基于所述第一分量和所述第三分量计算所述目标与所述双目相机之间的距离。由此,能够便捷地测出目标相对双目相机的距离,也从而确定目标相对双目相机的空间位置,进而能够便捷地计算第一旋转角度和第二旋转角度。
8、另外,在本公开第一方面所涉及的方法中,可选地,基于所述第一分量、所述第三分量、所述目标与所述双目相机之间的距离以及所述目标位于所述瞄准光轴时所述第一分量和所述第三分量满足的预设条件计算所述第一旋转角度。在这种情况下,由于目标位于瞄准光轴时,基于三角形关系式能够推导出第一分量和第三分量满足预设条件,进而能够基于预设条件准确且便捷地计算第一旋转角度。
9、另外,在本公开第一方面所涉及的方法中,可选地,所述双目相机瞄准所述目标时,所述第一分量和所述第三分量满足的预设条件为所述第一分量与所述第三分量相加为预设值,所述预设值通过令所述双目相机瞄准所述目标时对所述双目相机进行标定获得。在这种情况下,能够基于预设条件准确且便捷地计算第一旋转角度,并且能够在使用双目相机瞄准目标之前,对双目相机进行标定以获得在不同距离下的预设值,从而能够在后续在不同距离下计算第一旋转角度时,直接调用标定的预设值计算第一旋转角度。
10、另外,在本公开第一方面所涉及的方法中,可选地,所述第一透镜和所述第二透镜位于同一平面内,所述第一旋转角度为:,所述第二旋转角度为:,其中α1为所述第一旋转角度的参数值、β1为所述第二旋转角度的参数值、u为所述第一成像元件和所述第二成像元件的每个像素点在所述第一方向上和所述第二方向上的预设宽度的参数值、l1为所述双目相机的旋转中心至所述第一透镜和所述第二透镜位于的同一平面的第一预设距离的参数值、d1为所述目标至所述第一透镜和所述第二透镜位于的同一平面的距离的参数值、f为所述第一透镜和所述第二透镜的焦距的参数值、k为所述预设值的参数值,和分别表示所述第一光斑数据在所述第一坐标系中的所述第一分量的参数值和所述第二光斑数据在所述第二坐标系中的所述第三分量的参数值,和分别表示所述第一光斑数据在所述第一坐标系中的相对于所述第一透镜的光轴的所述第二分量的参数值和所述第二光斑数据在所述第二坐标系中的相对于所述第二透镜的光轴的所述第四分量的参数值。在这种情况下,目标位于双目相机的瞄准光轴上的任意位置时,基于三角形关系式能够推导出第一分量和第三分量满足的预设条件,进而能够基于预设条件准确且便捷地计算第一旋转角度。同时,由于双目相机的第一透镜和第二透镜的光轴与双目相机的瞄准光轴在第二方向不存在视差,也即第一光斑数据的第二分量和第二光斑数据的第四分量不会受到视差的影响,从而能够简化计算第二旋转角度的方法,同时,能够利用第二分量和第四分量的均值计算第二旋转角度,从而能够提高计算的准确性,由此,能够使瞄准目标的方法的计算更加便捷。
11、另外,本公开第二方面提供一种处理装置,包括执行本公开第一方面所涉及的方法的控制模块、以及与外部通讯的输入输出模块,所述输入输出模块通过总线与所述控制模块互联。在这种情况下,输入输出模块能够与本公开第一方面所涉及的双目相机通讯,由此控制模块能够接收双目相机的参数并基于瞄准目标的方法计算出双目相机要瞄准目标时需要旋转的第一旋转角度和第二旋转角度。
12、另外,本公开第三方面提供一种用于对目标进行瞄准的激光跟踪仪,包括用于生成激光束的激光源、如本公开第二方面所涉及的处理装置、基于本公开第一方面所涉及的方法获取第一旋转角度和第二旋转角度的双目相机、以及基于第一旋转角度和第二旋转角度调整所述激光束的方向的驱动单元。在这种情况下,处理装置能够获取双目相机瞄准目标过程中需要旋转的第一旋转角度和第二旋转角度,从而驱动单元能够基于第一旋转角度和第二旋转角度调整激光束的方向,以使激光束瞄准目标。
13、根据本公开,能够提供基于双目相机的瞄准目标的方法,用于提高激光跟踪仪瞄准目标的精度,同时提供了一种执行该方法的处理装置和激光跟踪仪。
- 还没有人留言评论。精彩留言会获得点赞!