自适应随机有限集多目标跟踪的估计噪声参数方法及装置与流程
本发明涉及雷达多目标跟踪,具体涉及自适应随机有限集多目标跟踪的估计噪声参数方法及装置。
背景技术:
1、随着雷达、声呐、光电等传感器技术的不断发展,多目标跟踪技术在军事领域和民用领域都有着广泛应用,军事应用领域包括导弹防御、空防、空间目标态势感知、海洋监视等,主要用于对导弹、卫星、飞机、舰船、潜航器等军事目标的跟踪监视;民用领域包括陆海空交通管制、自动驾驶、机器人技术、生物医学等。
2、在复杂环境下的雷达多目标跟踪问题中,过程噪声和测量噪声的协方差矩阵参数具有不确定性,其真实值是未知的并且时变的。
3、综上所述,现有技术中存在以下问题:如何确定多目标跟踪过程中的噪声参数,提高跟踪准确度。
技术实现思路
1、本发明的目的是为了解决如何确定多目标跟踪过程中的噪声参数,提高跟踪准确度的问题。
2、为此,一方面,本发明实施例提供了自适应随机有限集多目标跟踪的估计噪声参数方法,所述方法包括以下步骤:
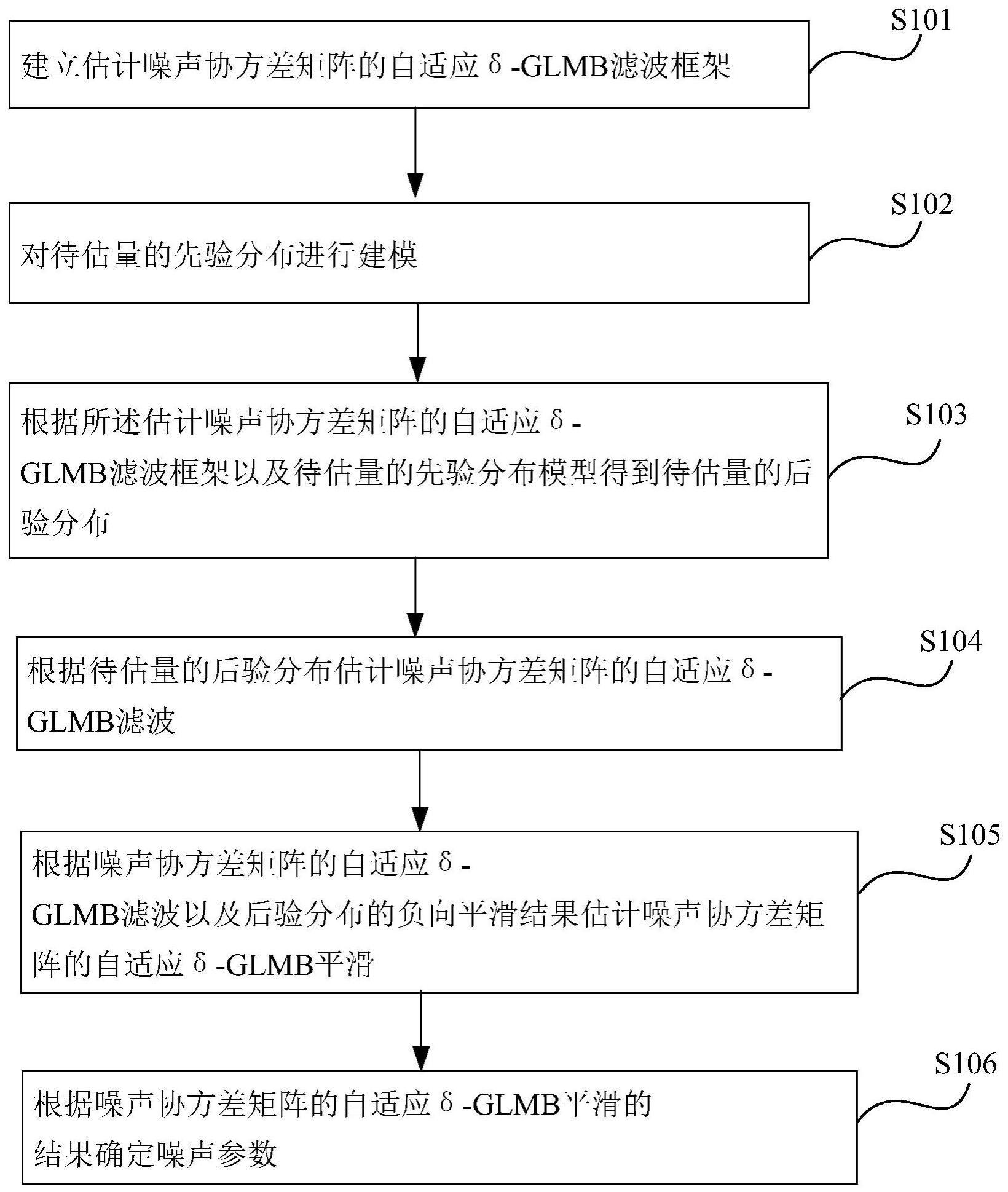
3、建立估计噪声协方差矩阵的自适应δ-glmb滤波框架;
4、对待估量的先验分布进行建模;
5、根据所述估计噪声协方差矩阵的自适应δ-glmb滤波框架以及待估量的先验分布模型得到待估量的后验分布;
6、根据待估量的后验分布估计噪声协方差矩阵的自适应δ-glmb滤波;
7、根据噪声协方差矩阵的自适应δ-glmb滤波以及后验分布的负向平滑结果估计噪声协方差矩阵的自适应δ-glmb平滑;
8、根据噪声协方差矩阵的自适应δ-glmb平滑的结果确定噪声参数。
9、另一方面,本发明实施例还提供了自适应随机有限集多目标跟踪的估计噪声参数装置,所述方法包括以下步骤:
10、框架单元,建立估计噪声协方差矩阵的自适应δ-glmb滤波框架;
11、先验单元,对待估量的先验分布进行建模;
12、后验单元,根据所述估计噪声协方差矩阵的自适应δ-glmb滤波框架以及待估量的先验分布模型得到待估量的后验分布;
13、滤波单元,根据待估量的后验分布估计噪声协方差矩阵的自适应δ-glmb滤波;
14、平滑单元,根据噪声协方差矩阵的自适应δ-glmb滤波以及后验分布的负向平滑结果估计噪声协方差矩阵的自适应δ-glmb平滑;
15、噪声单元,根据噪声协方差矩阵的自适应δ-glmb平滑的结果确定噪声参数。
16、上述技术方案具有如下有益效果:本发明提高随机有限集多目标跟踪方法的准确度,在噪声参数不确定下的自适应性开展研究。运用随机有限集理论、变分贝叶斯方法,设计估计噪声协方差矩阵参数的自适应δ-glmb滤波和平滑,解决噪声参数不确定问题。
技术特征:
1.自适应随机有限集多目标跟踪的估计噪声参数方法,其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的自适应随机有限集多目标跟踪的估计噪声参数方法,其特征在于,所述估计噪声协方差矩阵的自适应δ-glmb滤波,包括:
3.根据权利要求1所述的自适应随机有限集多目标跟踪的估计噪声参数方法,其特征在于,估计噪声协方差矩阵的自适应δ-glmb平滑,采用固定时滞的平滑方式,设置固定的时滞d,随着时刻k的变化,由k时刻以前的所有测量数据估计l=k-d时刻的多目标状态。
4.根据权利要求3所述的自适应随机有限集多目标跟踪的估计噪声参数方法,其特征在于,估计噪声协方差矩阵的自适应δ-glmb平滑包括两部分:正向滤波和负向平滑。
5.根据权利要求4所述的自适应随机有限集多目标跟踪的估计噪声参数方法,其特征在于,正向滤波采用估计噪声参数的自适应δ-glmb滤波,计算k时刻以前的所有后验分布πl|l,l≤k;负向平滑则利用多目标负向平滑递推公式从πk|k开始负向递推计算后验分布πk-1|k,πk-2|k,…,πk-d|k。
6.自适应随机有限集多目标跟踪的估计噪声参数装置,其特征在于,所述方法包括以下步骤:
7.根据权利要求6所述的自适应随机有限集多目标跟踪的估计噪声参数装置,其特征在于,所述滤波单元,包括:
8.根据权利要求6所述的自适应随机有限集多目标跟踪的估计噪声参数装置,其特征在于,平滑单元,包括:
9.根据权利要求8所述的自适应随机有限集多目标跟踪的估计噪声参数装置,其特征在于,平滑单元,还包括:正向滤波和负向平滑。
10.根据权利要求9所述的自适应随机有限集多目标跟踪的估计噪声参数装置,其特征在于,正向滤波采用估计噪声参数的自适应δ-glmb滤波,用于计算k时刻以前的所有后验分布πl|l,l≤k;负向平滑用于利用多目标负向平滑递推公式从πk|k开始负向递推计算后验分布πk-1|k,πk-2|k,…,πk-d|k。
技术总结
本发明提供了自适应随机有限集多目标跟踪的估计噪声参数方法及装置,所述方法包括以下步骤:建立估计噪声协方差矩阵的自适应δ‑GLMB滤波框架;对待估量的先验分布进行建模;根据估计噪声协方差矩阵的自适应δ‑GLMB滤波框架以及待估量的先验分布模型得到待估量的后验分布;根据待估量的后验分布估计噪声协方差矩阵的自适应δ‑GLMB滤波;根据噪声协方差矩阵的自适应δ‑GLMB滤波以及后验分布的负向平滑结果估计噪声协方差矩阵的自适应δ‑GLMB平滑;根据噪声协方差矩阵的自适应δ‑GLMB平滑的结果确定噪声参数。本申请在估计多目标状态的同时,对噪声参数进行估计辨识,降低噪声参数不确定性对随机有限集多目标跟踪方法性能的影响。
技术研发人员:李冬,孙杰,魏超,刘学,曾科军,黄晓冬,刘建男,翟月
受保护的技术使用者:中国人民解放军91550部队
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!