一种多轴联动视觉检测设备及多工位电机一致性标定方法与流程
本发明涉及视觉检测设备标定领域,具体地说,涉及一种多轴联动视觉检测设备及多工位电机一致性标定方法。
背景技术:
1、随着经济发展,各类外观要求较高的产品如电子产品的中框等陆续进入市场。由于这些产品的外观是否存在缺陷直接影响到其的正常使用;故而,在该类产品投入使用之前,需要对其进行外观视觉检测以筛选出外观存在缺陷的不良品。由于现在的该类产品的产量日益增大,与之相对应的视觉检测设备的需求的日益增大。
2、传统的人工检测由于检测效率低以及不良品检出率较低的问题已经逐渐被视觉检测设备取代。现有的视觉检测设备通常采用多轴联动的方式以对检测对象或者视觉设备进行姿态调整,从而能够对于检测对象的重点检测部位以完成覆盖。但是,由于多轴联动的方式需要大量的器件和线路布置来实现;现有的多轴联动设备的器件一方面存在着器件和线路布置复杂而导致整体的结构不够紧凑合理不便于搭建,另一方面,现有设备的结构布线问题也直接导致与该设备相适用的视觉检测方法存在着不够高效以及整个检测流程中无效运动较多从而容易对于检测过程中检测对象的稳定性造成影响,也使得整个检测过程不够精细而在检测过程中也容易出现差错。故而,一种器件布置更加合理的检测设备以及与之相适用的运行更加稳定高效的检测方法是目前市场上所欠缺的。
3、同时,现有的视觉检测设备由于产品的检测需求量大,故而大多需要多工位同步进行从而能够同时对于多个检测对象进行检测以较大程度的提高检测效率,但是,由于在设备安装调试过程中各个工位的旋转零点位置存在差异;此外,由于检测对象固定和视觉检测安装零件加工有平面度等误差,安装时有垂直度差异,前述误差会累计。故而各个工位间的一致性同步工作存在着差异,进而可能对整个检测工作的正常进行产生影响。
4、现有技术中对于如何稳定且低成本的对于多工位同步工作的一致性进行标定鲜有研究。同时也由于多轴设备本身的布置结构较为复杂,现有技术中常用的辅助标定设备如激光干涉仪,在多轴设备中经常出现光路被挡而无法应用的情况,因此,一种新型的多轴联动设备以及与之相适配应用的低成本标定方法是当前视觉检测领域所亟待解决的问题。
技术实现思路
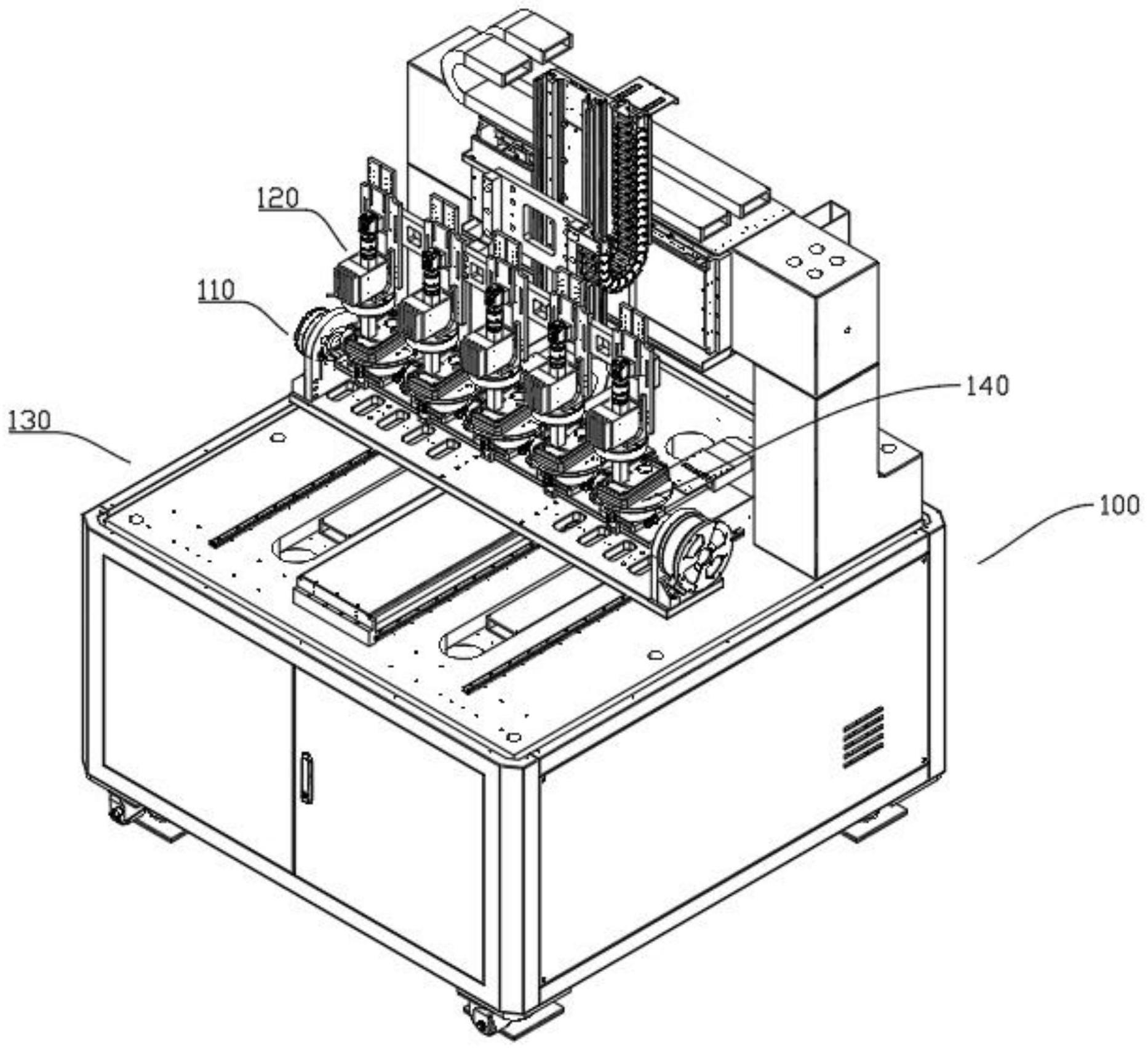
1、针对现有技术中存在的技术缺陷,本发明提供了一种多轴联动视觉检测设备,其包括设备主体,设备主体包括用于放置检测对象且具有第二旋转方向的工装组件,工装组件处能够放置标定块,标定块处形成有长方形状的基准块;
2、工装组件设有多个并依次形成第一工位、第二工位以及按此顺序排列的剩余工位处;各个工位处的工装组件分别由相应工位的工位电机驱动以实现第二旋转方向上的旋转;
3、设备主体还包括具有第二移动方向的视觉采集组件,工装组件第二旋转方向上的旋转轴与视觉采集组件的第二移动方向相一致;视觉采集组件设有多个且与工装组件一一对应。
4、具体说明地,本发明通过工装组件以及视觉采集组件在各个方向的移动或旋转能够较佳地协同配合以调整检测对象和视觉检测组件之间的相对位置,从而实现较佳的检测图像采集效果,进而确保从所采集的图像而分析检测得出的检测结果准确性。
5、作为优选,工装组件能够位于视觉采集组件处形成的检测区域内。
6、作为优选,各个工位的工位电机通过外部的控制信号以控制旋转角度。
7、作为优选,标定块与检测对象形状大小一致。
8、作为优选,标定块能够通过各个工位处的定位吸盘被吸附固定。
9、本发明还提供在前述一种多轴联动视觉检测设备与视觉采集组件配合使用,具体通过如下步骤进行标定;设备主体所处空间建立xyz轴的空间坐标系,z轴沿竖直方向形成,x轴和y轴沿水平平面相互正交形成;第二移动方向为z轴方向;标定块处的长方形基准块具有长度l;
10、步骤s1,将标定块放置固定于第一工位处;
11、步骤s2,第一工位对应的视觉采集组件沿z轴调整以使采图清晰,然后对第一工位进行采图并得到第一工位处工位电机在零位上的图像i0;
12、步骤s3:第一工位处的工位电机正方向旋转θ角,n*θ=180°;视觉采集组件采图,处理得到第一工位处的工位电机在θ角上的图像i1,并与i0相比对并得出对比量结果;
13、步骤s4:按s3中步骤,第一工位处的工位电机依次旋转到(n-1)*θ的位置,得到工位上2*θ到(n-1)*θ的图像i2到i(n-1)并均与图像i0相比对并得出对比量结果;
14、步骤s5:第一工位处的工位电机返回原点;
15、步骤s6:重复步骤s2到步骤s4 n次,求出各图像相对i0中的对比量结果;
16、步骤s7:取多次对比量结果的平均值,作为各(n-1)*θ角下正方向的第一工位的基准值;
17、步骤s8:按步骤s3到步骤s7反转第一工位处的工位电机,求出反方向的第一工位的基准值;
18、步骤s9:第一工位处的工位电机复位,第一工位对应相机沿z轴上升回位;标定块松开,取下,放在第二工位上;
19、步骤s10:第二工位上相机按步骤s2到s8求出第二工位各(n-1)*θ角下的正方向和反方向上的基准值;
20、步骤s11:按步骤s9到步骤s10完成剩余工位的各(n-1)*θ角下的正方向和反方向上的基准值;
21、步骤s12:以第一工位为基准,计算得出其余各工位在各(n-1)*θ角下的正方向和反方向的补偿值完成工位电机(126)一致性的标定。
22、作为优选,步骤s3以及步骤s4中,对比量为i1、i2至i(n-1)相对于i0中l边中线角度变化s11、s21至s(n-1)1。
23、作为优选,步骤s7和步骤s8中的基准值为l边中线的角度值,正方向上的基准值计算公式为反方向上的基准值计算公式为
24、作为优选,步骤s12中的补偿值计算方法为正方向补偿值smz=smz(n-1)-s1z(n-1)和反方向补偿值smf=smf(n-1)-s1f(n-1)。
25、作为优选,前述步骤得到的正方向补偿值和反方向补偿值能够作为参考使得检测人员通过控制调整相应电机的旋转角度以实现多工位一致性。
26、具体说明地,本发明通过标定块中标定块主体处的基准块的l边中线变化角度作为对比基准;一方面在进行图像对比时,l边中线角度的变化量能够在采集的图像中清楚的识别得出;另一方面,以l边中线角度变化作为对比量能够与工位电机的旋转角度直接对应从而保证误差较小且变化敏感度较高。
27、可以理解地,通过得到正方向以及反方向上的补偿值能够较佳地得出其他工位与第一工位在旋转不同角度时存在的偏差,从而检测人员能够以补偿值为参考再通过程序设定来消除该偏差以保证多工位的一致性,进而确保整个检测流程的同步稳定运行。故而能够有效地避免因各工位旋转角度存在差异而影响到采图和对比分析的情况。
技术特征:
1.一种多轴联动视觉检测设备,其特征在于:包括设备主体(100),设备主体(100)包括用于放置检测对象且具有第二旋转方向的工装组件(140),;工装组件(140)设有多个并依次形成第一工位、第二工位以及按此顺序排列的剩余工位处;各个工位处的工装组件(140)分别由相应工位的工位电机(911)驱动以实现第二旋转方向上的旋转;
2.根据权利要求1所述的一种多轴联动视觉检测设备,其特征在于:工装组件(140)能够位于视觉采集组件(120)处形成的检测区域内。
3.根据权利要求1所述的一种多轴联动视觉检测设备,其特征在于:各个工位的工位电机(911)通过外部的控制信号以控制旋转角度。
4.根据权利要求1所述的一种多轴联动视觉检测设备,其特征在于:工装组件(140)处能够放置标定块,标定块处形成有长方形状的基准块;标定块与检测对象形状大小一致。
5.根据权利要求4所述的一种多轴联动视觉检测设备,其特征在于:标定块能够通过各个工位处的定位吸盘被吸附固定。
6.多工位电机一致性标定方法,其特征在于:在权利要求1-5中的任一所述的一种多轴联动视觉检测设备通过如下步骤进行标定;设备主体(100)所处空间建立xyz轴的空间坐标系,z轴沿竖直方向形成,x轴和y轴沿水平平面相互正交形成;第二移动方向为z轴方向;标定块处的长方形基准块具有长度l;
7.根据权利要求6所述的多工位电机一致性标定方法,其特征在于:步骤s3以及步骤s4中,对比量为i1、i2至i(n-1)相对于i0中l边中线角度变化s11、s21至s(n-1)1。
8.根据权利要求7所述的多工位电机一致性标定方法,其特征在于:步骤s7和步骤s8中的基准值为l边中线的角度值,正方向上的基准值计算公式为s1z反方向上的基准值计算公式为
9.根据权利要求8所述的多工位电机一致性标定方法,其特征在于:步骤s12中的补偿值计算方法为正方向补偿值smz=smz(n-1)-s1z(n-1)和反方向补偿值smf=smf(n-1)-s1f(n-1)。
10.根据权利要求9所述的多工位电机一致性标定方法,其特征在于:正方向补偿值和反方向补偿值能够作为参考以通过控制调整相应电机的旋转角度以实现多工位一致性。
技术总结
本发明涉及视觉检测设备标定领域,具体地说,涉及一种多轴联动视觉检测设备及其多工位电机一致性标定方法。针对现有技术中存在的技术缺陷,本发明提供了一种多轴联动视觉检测设备,其包括设备主体,设备主体包括用于放置检测对象且具有第二旋转方向的工装组件,工装组件处能够放置标定块;本发明通过标定块中标定块主体处的基准块的l边中线变化角度作为对比基准;一方面在进行图像对比时,l边中线角度的变化量能够在采集的图像中清楚的识别得出;另一方面,以l边中线角度变化作为对比量能够与工位电机的旋转角度直接对应从而保证误差较小且变化敏感度较高。
技术研发人员:王孟哲,梁正南,赖勉力,李恩全
受保护的技术使用者:广东九纵智能科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!