一种基于外部条件约束的多平台信息协同导航增强方法
本发明涉及组合导航领域,更具体地说,涉及一种基于外部条件约束的多平台信息协同导航增强方法。
背景技术:
1、多源融合导航已成为学术界和工业界关注的焦点和研究热点,用于保证导航定位的高精度、强鲁棒和可靠性,具有广泛的应用前景。系统综合利用惯性导航系统(inertialnavigation system,ins)和全球卫星导航系统(global navigation satellite system,gnss)接收机、里程计、相机等辅助传感器,实现多源异构导航信息融合和实时精准定位。目前一般通过加权融合方法、联邦卡尔曼滤波方法、交互式多模型融合等算法对多传感器信息进行融合。
2、海面无人机通常采用多源融合导航来提高导航精准度。但海上无人机导航受诸多外部复杂环境因素影响。由于海洋地理与气象环境复杂,在陆地先进的无线通信技术不能完全满足海上无线通信系统要求,综合考虑海上无线通信环境影响因素,通过建模海上无线通信信道衰落特征模型,对于海上无线通信系统研究具有重要意义。
3、由于海面外界环境因素较多,晴雨条件、海风风强、海浪摆动等对多源组合导航中的各种导航方法存在不同程度的影响,使得到达接收端的多径信道随着海况发生变化,导致导航情况难以估计。需要建立一种基于海面复杂环境因素的多平台信息协同导航系统模型。
技术实现思路
1、现有的无人机导航方案大多只考虑正常环境下的导航校正,而对海上复杂环境的干扰考虑不足,导致导航结果出现较大误差。针对上述技术问题,本发明提出了一种基于外部条件约束的多平台信息协同导航增强方法,其基于无人机和舰船平台。本发明的方案采用环境约束修正与组合导航修正相结合的方法来进行导航增强,构建以惯导系统为核心的惯性/视觉/卫星/气象组合导航模型。其中,组合导航初始内部参数是使用无人机平台和舰船平台共同得到的,复杂环境条件约束是由无人机平台和舰船平台测量得到的。相比起现有方案,本发明的方案对海面复杂环境和多种导航平台进行建模,可以提高复杂环境下的导航精确程度。
2、为达到上述目的,本发明采用如下技术方案:
3、一种基于外部条件约束的多平台信息协同导航增强方法,包括如下步骤:
4、步骤1、以海上舰船平台为地面监控部分,所述地面监控部分由主控站、监测站、注入站以及通信和辅助系统组成,无人机携带惯性导航单元、视觉导航单元、卫星导航单元、辅助导航单元,具体步骤如下:
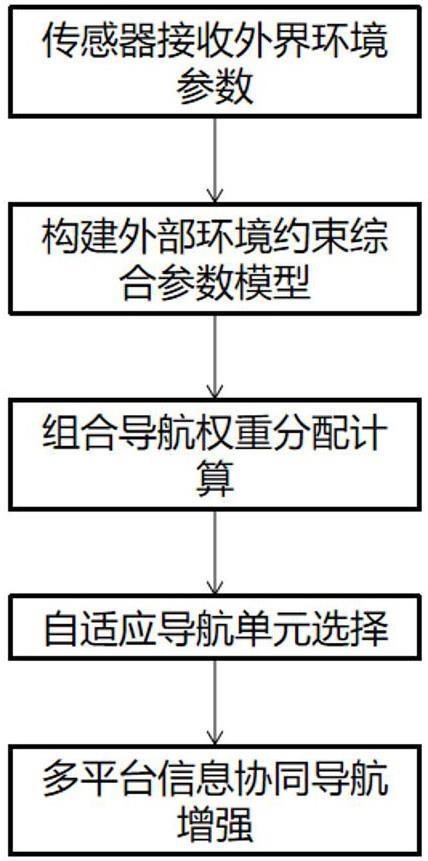
5、步骤(1-1)海上舰船平台以恒定速度航行,通过监测站进行晴雨状况、对流层参数、海风状况、洋流状况的数据采样,获得海面环境数据;
6、步骤(1-2)无人机对环境参数进行补充监测,获得海面环境数据,将海面环境数据发送至主控站;
7、步骤(1-3)无人机将其惯性、视觉、卫星、气象导航单元的内部参数测量值发送至舰主控站;
8、步骤2、基于步骤(1-1)与步骤(1-2)构建的海面环境数据,构建外部条件约束综合参数模型;
9、步骤3、基于步骤(1-1)中的海上舰船平台的视觉导航单元、卫星导航单元、气象导航单元,步骤(1-3)中的无人机的惯性、视觉、卫星、气象导航单元,步骤2构建的外部条件约束综合参数模型,组合各导航单元形成组合导航系统,构建组合导航系统的外部约束校准模型;
10、步骤4、根据基于因子图的多平台信息协同导航增强方法,基于线性时变系统的可观测度分析,采用增量因子图架构,计算组合导航系统的各导航单元子滤波器的权重因子;基于组合导航系统中视觉、卫星、气象导航单元的权重因子,在线选择最佳因子进行融合,自动调节各导航单元的信息权重,从而实现基于外部条件约束的多平台信息协同导航增强方法;
11、步骤5、构建以惯导传感器为核心的组合导航模型,基于卡尔曼滤波,确定多平台信息协同导航增强系统的状态方程和量测方程;根据卡尔曼滤波算法的时间更新方程、状态更新方程,随着外界环境的变化,在线调整估计误差协方差矩阵以及卡尔曼滤波增益。
12、进一步地,所述步骤2的外部条件约束综合参数模型包括:基于晴、雾、降雨、降雪的不同气象环境,构建海上气象环境参数模型;基于对流层电离参数,构建基于水平梯度模型的对流层环境参数模型;基于海上舰船平台和无人机平台风力变换,构建海面无人机风场参数模型;基于海浪运动导致反射路径阴影衰落波动效应,构建洋流状况环境参数模型。
13、进一步地,所述步骤3的计算步骤如下:
14、引入海上气象环境、对流层环境、海面无人机风场、洋流状态环境参数模型对视觉、卫星、气象导航单元的影响,构建视觉、卫星、气象导航校正模型,并构建外部条件对视觉、卫星、气象导航单元的综合约束参数校准矩阵。
15、进一步地,所述步骤4的具体步骤为:
16、步骤(4.1) 基于线性时变系统的可观测度分析,计算各导航单元子滤波器状态变量可观测度;
17、步骤(4.2) 基于步骤(4.1)计算得出的每个导航单元子滤波器状态变量的可观测度,根据信息守恒原则并通过归一化处理,计算出每个子滤波器中的各状态变量的信息分配权重;
18、步骤(4.3)基于最大后验概率计算多平台信息协同导航增强变量的最优系统状态估计;
19、步骤(4.4)采用增量平滑的因子图融合算法,对于第一次检测,定义先验因子,构建可信度先验因子结点;
20、步骤(4.5)考虑可信度权值对接入的多源组合导航因子的影响,定义传感器与惯性导航单元组合时的因子结点;
21、步骤(4.6)利用两相邻时刻变量结点之间的约束,定义k及k+1时刻间的二元状态转移因子;
22、步骤(4.7)假设为高斯噪声模型,代价函数定义为平方马氏距离;基于步骤(4.4)中可信度先验因子结点,基于步骤(4.5)中传感器与惯性导航单元组合时的因子结点,基于步骤(4.6)中k及k+1时刻间的二元状态转移因子结点,计算多平台信息协同导航增强变量的最优估计;
23、通过高斯牛顿法求解非线性最小二乘问题,经过qr分解使用增量平滑,将最优解更新迭代直到收敛。
24、进一步地,采用海上舰船平台中的晴雨参数测量装置,对流层参数观测装置,风场参数测量装置,洋流参数测量装置的测量数据用于协同增强多平台组合导航,提高组合导航精度结果。
25、进一步地,所述步骤1中的视觉导航单元使用基于可见光双目相机的视觉导航方法。
26、本发明与现有技术相比所具有的有益效果:
27、本发明提出了一套基于无人机和舰船平台的的基于外部条件约束的多平台信息协同导航增强方法。本发明的方案采用环境约束修正与组合导航修正相结合的方法来进行导航增强,构建以惯导系统为核心的惯性/视觉/卫星/气象组合导航模型。其中,组合导航初始内部参数是由无人机平台和舰船平台提供得到的,复杂环境条件约束是由舰船平台测量得到的。相比起现有方案,本发明的方案对海面复杂环境和多种导航平台进行建模,可以提高复杂环境下的导航精确程度。
- 还没有人留言评论。精彩留言会获得点赞!