一种新型多轴联动视觉检测设备、方法及应用与流程
本发明涉及视觉检测领域,具体地说,涉及一种新型多轴联动视觉检测设备、方法及应用。
背景技术:
1、随着经济发展,各类外观要求较高的产品如电子产品的中框等陆续进入市场。由于这些产品的外观是否存在缺陷直接影响到其的正常使用;故而,在该类产品投入使用之前,需要对其进行外观视觉检测以筛选出外观存在缺陷的不良品。由于现在的该类产品的产量日益增大,与之相对应的视觉检测设备的需求的日益增大。
2、传统的人工检测由于检测效率低以及不良品检出率较低的问题已经逐渐被视觉检测设备取代。现有的视觉检测设备通常采用多轴联动的方式以对检测对象或者视觉设备进行姿态调整,从而能够对于检测对象的重点检测部位以完成覆盖。但是,由于多轴联动的方式需要大量的器件和线路布置来实现;现有的多轴联动设备的器件一方面存在着器件和线路布置复杂而导致整体的结构不够紧凑合理不便于搭建,另一方面,现有设备的结构布线问题也直接导致与该设备相适用的视觉检测方法存在着不够高效以及整个检测流程中无效运动较多从而容易对于检测过程中检测对象的稳定性造成影响,也使得整个检测过程不够精细而在检测过程中也容易出现差错。故而,一种器件布置更加合理的检测设备以及与之相适用的运行更加稳定高效的检测方法是目前市场上所欠缺的。
3、同时,现有的视觉检测设备由于产品的检测需求量大,故而大多需要多工位同步进行从而能够同时对于多个检测对象进行检测以较大程度的提高检测效率,但是,现有技术中对于如何稳定且低成本的对于多工位同步工作的一致性进行标定鲜有研究。同时也由于多轴设备本身的布置结构较为复杂,现有中常用的辅助标定设备如激光干涉仪,在多轴设备中经常出现光路被挡而无法应用的情况,因此,一种新型的多轴联动设备以及与之相适配应用的低成本标定方法是当前视觉检测领域所亟待解决的问题。
技术实现思路
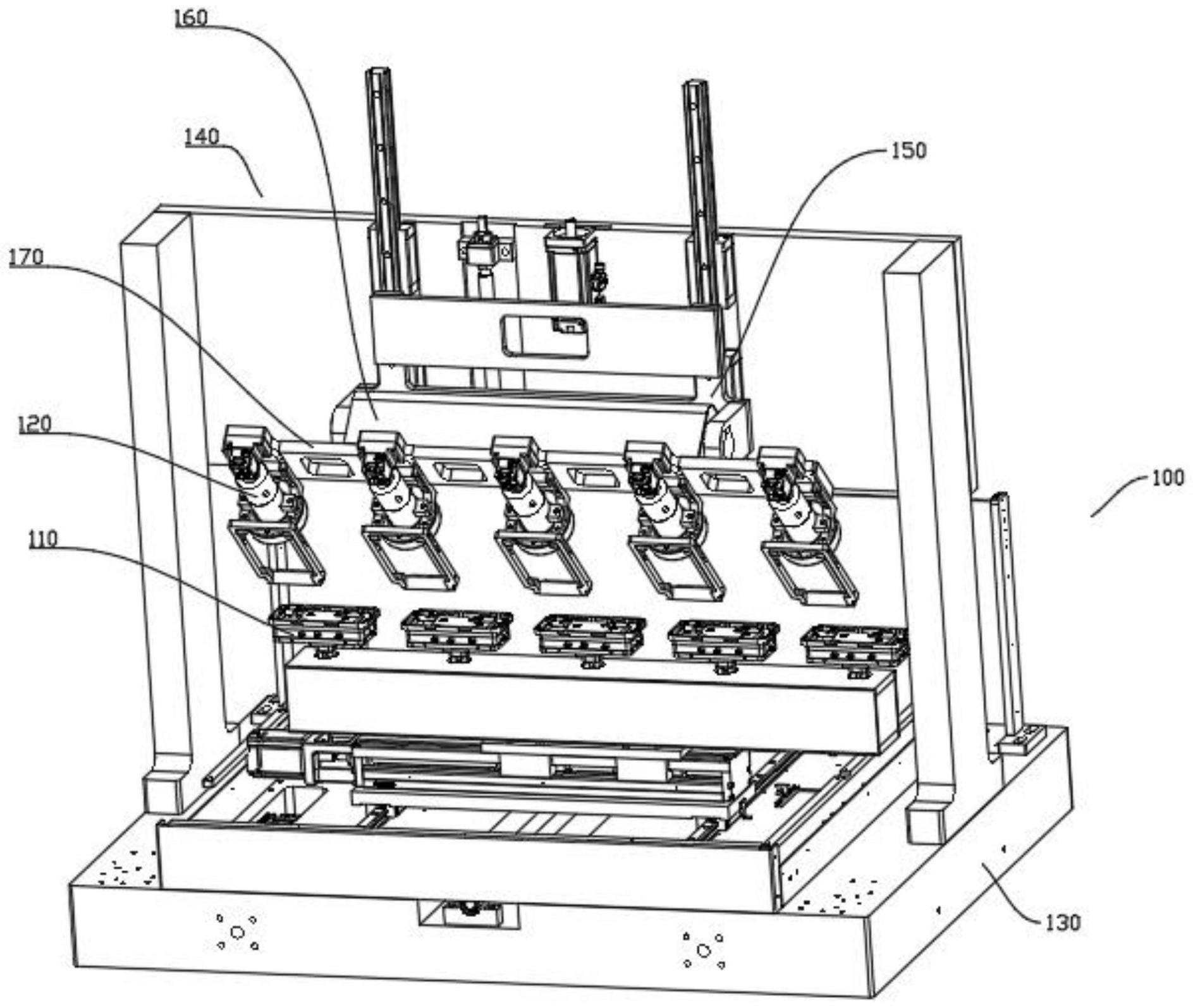
1、针对现有技术中存在的技术缺陷,本发明提供了一种新型多轴联动视觉检测设备其包括设备主体,设备主体包括安装平台,安装平台处布置有具有第一移动方向、第二移动方向以及第一旋转方向的工装组件,工装组件用于放置检测对象;
2、安装平台处竖直布置有视觉安装架;视觉安装架位于工装组件上方的位置处设置有沿第三移动方向与其移动配合的旋转安装板;旋转安装板沿第一移动方向上的两端之间设有具有第二旋转方向的旋转罩,旋转罩处通过视觉安装板安装有随旋转罩旋转的视觉采集组件;视觉采集组件处形成检测区域,工装组件能够位于检测区域处。
3、本发明中通过视觉安装架能够较佳地为旋转安装板以及视觉采集组件提供一个稳定的安装位置。同时,通过旋转安装板来进行旋转罩的安装也能够使得旋转罩能够得到一个较安全稳定的布置空间。
4、此外,本发明中工装组件仅具有一个方向上的旋转,故而相比于具有两个轴向转动自由度的工装组件;一方面,在两个方向上旋转的工装组件在运动过程中,在两个方向上同时进行旋转时,对于与之牵涉的线路和气路也会随之发生移动,由于两个旋转方向本身所需的布线量较多且较为复杂,故而在运动过程中,容易出现线路、气路以及工装组件之间发生运动干涉的情况,对于布线的要求较高。具体地,本发明在安装搭建设备主体的过程中,与工装组件相关的线路以及气路的布置更为简单;从而能够较佳地减小安装搭建中的器件本身对于工装组件在运动和旋转上所产生的限制影响,进而使得工装组件能够实现三百六十度范围上的旋转;
5、另一方面,工装组件只进行一个方向上的旋转能够更好的确保检测对象位于工装组件的位置稳定性;在两个方向上旋转的工装组件,在两个方向上同时进行旋转时,由于检测对象的运动幅度较大,更易导致检测对象在工装组件处发生偏移;从而可能对于检测图像的采集结果产生影响。本发明中,视觉采集组件具有另一方向上旋转方向,从而能够与工装组件所具有的第一旋转方向相配合以满足视觉检测图像的采集过程中所需的相对空间位置调整需要。
6、作为优选,第一移动方向、第二移动方向和第三移动方向两两正交,第一旋转方向和第二旋转方向的旋转轴相互垂直;第一旋转方向的旋转轴与第三移动方向相平行;第二旋转方向的旋转轴与第一移动方向相平行。
7、可以理解地,相互正交的旋转轴一方面能够较方便地搭建得到,另一方面,也能够便于位置姿态调节的设定和计算。
8、作为优选,工装组件包括安装底板,安装底板处布置有吸盘安装板,吸盘安装板处均匀分布有用于吸附检测对象的吸嘴。
9、可以理解地,通过吸嘴能够较佳地将检测对象吸附固定,同时,通过控制气路边能够将检测对象固定或松开,操作简便。
10、作为优选,安装平台处沿第二移动方向平行对称设置有第二直线导轨,第二直线导轨上设置有与其滑动配合的第二滑动块;安装平台处设有用于驱动第二滑动块沿第二移动方向移动的第二滚珠丝杆模组;第二滑动块上安装有第一安装板;第一安装板上安装有沿第一移动方向布置的第一导轨座;第一导轨座处设有与其沿第一移动方向滑动配合的第一滑动座;第一导轨座处还设有用于驱动第一滑动座滑动的第一滚珠丝杆模组,第一滚珠丝杆模组的第一滑动座上安装有布置有工装组件的工装安装座;工装安装座处设有用于带动工装组件在第一旋转方向上旋转的同步带组件;同步带组件包括驱动轮,从动轮,惰轮和用于实现驱动轮、从动轮以及惰轮之间动力传动的传动带;驱动轮由同步带驱动电机以驱动;安装平台位于第二移动方向上的一侧设有用于感应监测工装组件在第二移动方向上的移动状态的感应器组件。
11、具体说明地,由驱动轮同步驱动的各个从动轮能够较佳地保持同步,从而能够较佳地确保各个工装组件的旋转一致性,进而能够实现各个工装组件处检测对象的同步检测的稳定进行。从动轮和工装组件通过蜗轮蜗杆减速机以进行传动。
12、可以理解地,通过惰轮能够为传动带提供稳定的传动路线,从而能够便于安装人员对传动带进行安装。此外,惰轮还能在为传动带提供传动路线的同时,将传动带张紧并且还确保传动带在传动时避免旋转罩内的其他器件发生干涉;从而保证了传动带的顺利稳定运行。
13、作为优选,视觉检测组件包括相机和光源;相机用于对于检测区域处放置于工装组件处检测对象的检测图像进行视觉采集;光源用于对检测区域进行打光。
14、具体地,通过光源和相机的相互配合能够较佳地实现检测图像采集,同时光源仅在相机拍照时闪光;一方面可以较佳地节省电力和提高光源的使用寿命,另一方面也能够有效地避免光亮对于检测人员的工作造成干扰。
15、作为优选,视觉安装架包括布置于安装平台两侧的侧边立板;第二直线导轨以及工装组件位于两侧的侧边立板之间;两侧的侧边立板之间连接有连接横板,连接横板位于工装组件的上方且不会与工装组件在第二移动方向上的移动发生干涉;连接横板处平行对称布置有沿第三移动方向的第三直线导向块;第三直线导镶块处与其滑动配合的第三滑动杆与旋转安装板相连接;连接横板处位于两侧的第三直线导向块之间的位置处设有沿第三移动方向布置有第三滚珠丝杆模组,第三滚珠丝杆模组中的移动座通过驱动连板与旋转安装板相连接以驱动旋转安装板沿第三移动方向移动。
16、连接横板能够较佳地为旋转安装板以及后续的视觉采集组件的安装提供一个稳定地安装基座;从而使得视觉采集组件在旋转过程中能够较佳地按照控制信号进行旋转,进而能够有效地避免视觉采集组件的晃动而导致检测图像采集不清而影响后续检测结果的情况。此外,连接横板也能在后续的线路气路布置过程中作为一个良好的布置位置。
17、作为优选,旋转安装板沿第一移动方向上的两端垂直形成有旋转装配板,旋转罩安装于两侧的旋转装配板之间所形成的空间内,一端的旋转装配板处设置有用于驱动旋转罩旋转的第二伺服电机;另一端的旋转装配板处设置有用于活动安装旋转罩的安装轴承;旋转罩与安装有视觉采集组件的视觉安装板相连接并带动其在第二旋转方向上旋转;连接横板以及旋转安装板共同对视觉安装板以及视觉采集组件的旋转范围形成限位约束。
18、总的来说,旋转安装板,旋转罩,视觉安装板以及视觉采集组件所构成的一个整体能够在侧边立板以及连接横版之间所围成的空间内得到安全稳定的布置;同时,如此布置的视觉采集组件也能够对于工装组件的第二移动方向的移动路径进行较全面的覆盖以满足检测图像采集过程中不同采集角度的需要。
19、本发明还提供一种新型多轴联动视觉检测图像的采集方法,基于前述的一种新型多轴联动视觉检测设备实现,其中设备主体所处空间建立xyz轴的空间坐标系,z轴沿竖直方向形成,x轴和y轴沿水平平面相互正交形成;第一移动方向、第二移动方向和第三移动方向分别为x轴方向,y轴方向和z轴方向,定义第一旋转方向为a轴方向,第二旋转方向为r轴方向;其具体包括以下步骤:
20、步骤s1:上料
21、将检测对象放置于工装组件处;
22、步骤s2:检测图像采集
23、通过第一移动方向、第二移动方向、第一旋转方向、第三移动方向和第二旋转方向调整工装组件和视觉采集组件间的相对空间位置依次对于检测对象所需检测的重点位置的检测图像进行视觉采集;
24、步骤s3:检测筛选
25、对采集到的检测图像进行分析以得出检测结果并筛选出不良品。
26、作为优选,检测对象具有四个侧边和四个对角;视觉检采集组件包括相机和光源;其中步骤s2具体包括以下步骤,
27、步骤s21:r轴旋转,使得检测对象长边与x轴平行,y轴移动检测对象到相机视野下,调整z轴对焦,调整x轴移到检测对象平面右上角,移动x轴扫描图像,一边拍完后y轴移动拍摄另一边,再移动x轴扫描拍图,重复动作完成中框整个平面拍照检测;
28、步骤s22:完成平面拍照检测后,y轴正方向移动,a轴旋转70°,z轴正方向向下运动,之后y轴移动,z轴移动,两轴调整完成对焦;然后x轴正方向移动,运动到第一条内侧边起始位,沿x轴负方向运动开始拍照,完成第一个内侧边拍照检测;
29、步骤s23:完成第一条内侧边检测后,r轴正方向旋转35°,旋转到第一个内侧对角位,调整y轴对焦,x轴移动到拍照位后,拍照完成第一个内侧对角检测;
30、步骤s24:完成第一个内侧对角检测后,r轴正方向再旋转55°,旋转到第二条内侧边,调整y轴对焦,x轴移动到第二条内侧边的起始拍照位后,x轴负方向移动拍照,完成第二条内侧边检测;
31、步骤s25:完成第二条内侧边检测后,r轴再旋转35°,旋转到第二个内侧对角位,调整y轴对焦,x轴移动到拍照位后,拍照完成第二个内侧对角检测;
32、步骤s26:完成第二个内侧对角检测后,r轴正方向再旋转55°,旋转到第三条内侧边,调整y轴对焦,x轴移动到第三条内侧边的起始拍照位后,x轴负方向移动拍照,完成第三条内侧边检测;
33、步骤s27:完成第三条内侧边检测后,r轴正方向再旋转35°,旋转到第三个内侧对角位,调整y轴对焦,x轴移动到拍照位后,拍照完成第三个内侧对角检测;
34、步骤s28:完成第三个内侧对角检测后,r轴正方向再旋转55°,旋转到第四条内侧边,调整y轴对焦,x轴移动到第四条内侧边的起始拍照位后,x轴负方向移动拍照,完成第四条内侧边检测;
35、步骤s29:完成第四条内侧边检测后,r轴正方向旋转35°,旋转到第四个内侧对角位,调整y轴对焦,x轴移动到拍照位后,拍照完成第四个内侧对角检测;
36、步骤s210:完成四条内侧边和四个内侧对角的检测后,r轴负方向旋转35°,a轴继续旋转使得相机视野与检测对象外框面垂直拍照,调整y轴,z轴完成对焦,x轴正方向移动到起始拍照位后,x轴再负方向运动拍照,完成了第一条外侧边拍照检测;
37、步骤s211:r轴负方向旋转45°,调整y轴对焦,x轴移动到拍照位后,拍照完成第一个外侧对角检测;
38、步骤s212:完成第一个外侧对角检测后,r轴负方向旋转45°,调整y轴对焦,x轴移动到拍照位,x轴负方向移动完成第二条外侧边拍照;
39、步骤s213:完成第二条外侧边拍照后,r轴负方向旋转45°,调整y轴对焦,x轴移动到拍照位后,拍照完成第二个外侧对角检测;
40、步骤s214:完成第二个外侧对角检测后,r轴负方向旋转45°,调整y轴对焦,x轴移动到拍照位,x轴负方向移动完成第三条外侧边拍照;
41、步骤s215:完成第三条外侧边拍照后,r轴负方向旋转45°,调整y轴对焦,x轴移动到拍照位后,拍照完成第三个外侧对角检测;
42、步骤s216:完成第三个外侧对角检测后,r轴负方向旋转45°,调整y轴对焦,x轴移动到拍照位,x轴负方向移动完成第四条外侧边拍照;
43、步骤s217:完成第四条外侧边拍照后,r轴负方向旋转45°,调整y轴对焦,x轴移动到拍照位后,拍照完成第四个外侧对角检测;
44、步骤s218:完成四条外侧边和四个外侧对角检测后,z轴上抬移动回位,a轴旋转回到与平面垂直状态,期间r轴正方向旋转45°回至平面时的角度位置,最后调整各轴回到初始状态。
45、可以理解地,本发明中的检测图像采集方法能够较佳地对检测对象中易出现缺陷的四个侧边和四个对角检测以及平面上四条边进行检测;从而能够在保持较高的检测效率的同时具有较广的检测范围,进而保证较高的不良品检出率。
46、具体地,本发明中的检测图像采集方法能够同时对于多个放置于各个工位处的检测对象进行同步采集;此外,在各个部位的图像采集过程中,待采集的检测对象始终位于所处工位处,并且通过与所处工位相对应的相机进行拍照采图。并且检测对象和视觉采集组件也只需跟随设定好的旋转角度而依次完成各个部位的拍照采图;从而在整个采图过程中能够稳定便捷地迅速对检测对象的重点部位进行视觉图像采集,进而较佳地提高图像采集效率,进而保证了后续能够较高效地对于所采集图像进行分析处理以得出检测对象的外观缺陷检测结果。
47、并且,在采图过程中,所设定好的旋转角度以及各个角度的旋转顺序能够较佳地保证检测对象的各个重点部位均能够得到覆盖,从而能够较佳地避免缺陷检测遗漏的情况。并且采用上述流程中的旋转角度和各个角度的旋转顺序能够较佳地确保整个检测流程中,整体流程的运行保持平顺流畅且高效,无效旋转较少,从而较佳地减小了在检测过程中,因旋转过于复杂而影响到检测对象定位稳定性的情况,进而在旋转过程中能够稳定地依次完成各个重点部位的检测视觉图像采集。
48、本发明还提供一种新型多轴联动视觉检测设备的应用,在检测对象为手机中框时,采用前述的一种新型多轴联动视觉检测设备并给予前述的检测图像采集方法对手机中框进行检测图像采集。
- 还没有人留言评论。精彩留言会获得点赞!