飞机距离的测量装置、地面设备和方法与流程
本公开涉及飞机测距领域,尤其涉及一种航空地面设备与飞机距离的测量装置、地面设备和方法。
背景技术:
1、相关技术中,航空地面设备与飞机距离的测量通常采用测量装置,例如超声波测距、红外测距、毫米波雷达等类型的测量装置。这些类测量装置一般只能获得距离信息,不能直观观察地面设备与飞机的实时情况。在航空地面设备靠近飞机时,在航空地面设备前端与飞机机腹处存在视线盲区,当天气环境恶劣,如遇到雨、雾等天气时,使用单一测量装置测量存在测量准确性和可靠性下降的问题。
技术实现思路
1、本公开实施例提供了一种航空地面设备与飞机距离的测量装置、地面设备和方法,涉及飞机测距领域,可以提高距离输出值的准确性,还可以直观的向操作人员显示航空地面设备与飞机的距离。
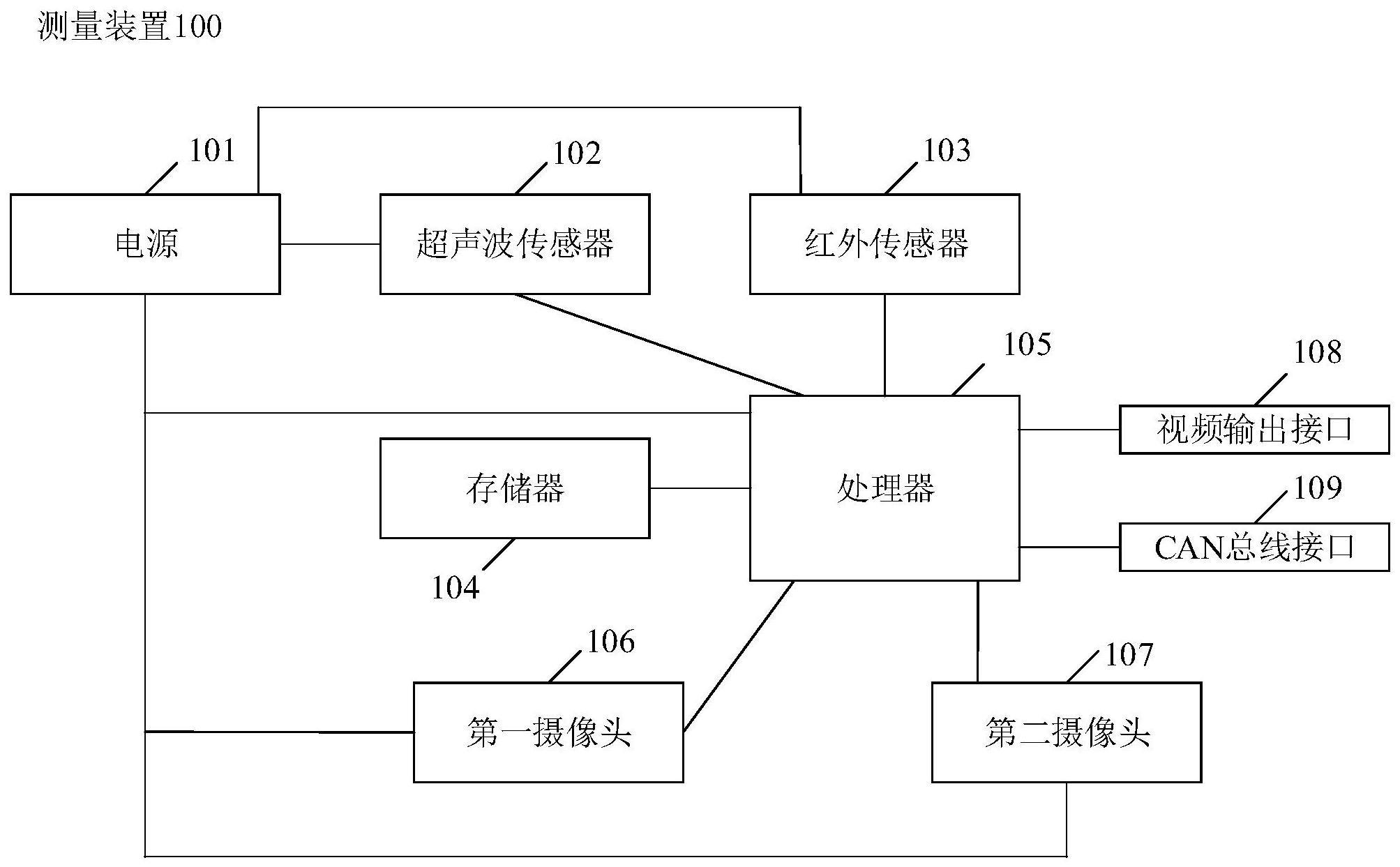
2、本公开实施例提供了一种航空地面设备与飞机距离的测量装置,包括:第一测距单元,用于测量所述航空地面设备与飞机舱门之间的第一距离;第二测距单元,用于测量所述航空地面设备与所述飞机舱门之间的第二距离;处理器,用于根据所述第一距离和所述第二距离确定距离输出值;视频输出单元,用于获取包括所述飞机舱门的实时视频,将所述距离输出值叠加至所述实时视频。
3、在一个实施例中,所述第一测距单元包括第一摄像头和第二摄像头,所述处理器根据所述第一摄像头和所述第二摄像头通过双目测距获取所述航空地面设备与所述飞机舱门之间的第一距离。
4、在一个实施例中,所述处理器具有飞机舱门识别模型;所述飞机舱门识别模型可以根据通过所述第一摄像头和/或所述第二摄像头获得的飞机舱门图像,识别所述飞机的飞机舱门上的特征物的特征点,其中,所述特征物为上门板、下门板、窗口、控制手柄、门左边界、门右边界、门槛、上部铰链、下部铰链中的至少一种。
5、在一个实施例中,所述处理器根据所述第一摄像头和所述第二摄像头通过双目测距获取所述航空地面设备与所述飞机舱门之间的第一距离包括:所述处理器根据所述第一摄像头和所述第二摄像头通过双目测距获取所述航空地面设备与所述飞机的飞机舱门上的特征物的特征点之间的第一距离。
6、在一个实施例中,所述处理器当所述航空地面设备与所述飞机舱门的距离大于第一阈值时,根据所述第一距离确定距离输出值;所述处理器当所述航空地面设备与所述飞机舱门的距离小于或等于第一阈值时,根据所述第二距离确定距离输出值。
7、在一个实施例中,第二测距单元包括第一传感器和第二传感器;所述处理器当所述航空地面设备与所述飞机舱门的距离小于或等于第二阈值时,根据所述第一传感器测量的第二距离确定距离输出值,其中,所述第二阈值小于所述第一阈值;所述处理器当所述航空地面设备与所述飞机舱门的距离大于所述第二阈值且小于或等于第一阈值时,根据所述第一传感器和所述第二传感器测量的第二距离确定距离输出值。
8、在一个实施例中,所述处理器根据所述第一传感器和所述第二传感器测量的第二距离确定距离输出值包括:所述处理器在所述第一传感器和所述第二传感器分别测量的第二距离的差值在一阈值范围内时,以所述第一传感器和所述第二传感器分别测量的第二距离的平均值为距离输出值。
9、在一个实施例中,装置还包括:控制器区域网络can输出单元,用于将所述距离输出值发送至所述航空地面设备的速度控制装置,以使所述速度控制装置根据距离输出值限制所述航空地面设备的速度。
10、本公开实施例提供了一种航空地面设备,包括如上实施例中任一项所述的测量装置。
11、本公开实施例提供了一种航空地面设备与飞机距离的测量方法,包括:获取包括飞机舱门的第一图像;识别所述第一图像中的飞机舱门和飞机舱门上的特征物;获取所述航空地面设备与所述特征物之间的第一距离;获取航空地面设备与飞机舱门之间的第二距离;根据所述第一距离和所述第二距离确定距离输出值;获取包括所述飞机舱门的实时视频,将所述距离输出值叠加至所述实时视频。
12、在一个实施例中,所述根据所述第一距离和所述第二距离确定距离输出值,包括:
13、当所述航空地面设备与所述飞机舱门的距离大于第一阈值时,根据所述第一距离确定距离输出值;
14、当所述航空地面设备与所述飞机舱门的距离小于或等于第一阈值时,根据所述第二距离确定距离输出值;
15、当所述航空地面设备与所述飞机舱门的距离小于或等于第二阈值时,根据第一传感器测量的第二距离确定距离输出值,其中,所述第二阈值小于所述第一阈值;
16、当所述航空地面设备与所述飞机舱门的距离大于所述第二阈值且小于或等于第一阈值时,根据所述第一传感器和第二传感器测量的第二距离确定距离输出值。
17、在一个实施例中,所述当所述航空地面设备与所述飞机舱门的距离大于所述第二阈值且小于或等于第一阈值时,根据所述第一传感器和第二传感器测量的第二距离确定距离输出值,包括:
18、在所述第一传感器和所述第二传感器分别测量的第二距离的差值在一阈值范围内时,以所述第一传感器和所述第二传感器分别测量的第二距离的平均值为距离输出值。
19、本申请的航空地面设备与飞机距离的测量装置,通过第一测距单元,用于测量所述航空地面设备与飞机舱门之间的第一距离;第二测距单元,用于测量所述航空地面设备与所述飞机舱门之间的第二距离;处理器,用于根据所述第一距离和所述第二距离确定距离输出值;视频输出单元,用于获取包括所述飞机舱门的实时视频,将所述距离输出值叠加至所述实时视频,可以通过不同测距方式的结合提高距离输出值的准确性,还可以直观的向操作人员显示航空地面设备与飞机的距离,有利于提高安全性。
技术特征:
1.一种航空地面设备与飞机距离的测量装置,其特征在于,包括:
2.根据权利要求1所述的测量装置,其特征在于,所述第一测距单元包括第一摄像头和第二摄像头,所述处理器根据所述第一摄像头和所述第二摄像头通过双目测距获取所述航空地面设备与所述飞机舱门之间的第一距离。
3.根据权利要求2所述的测量装置,其特征在于,所述处理器具有飞机舱门识别模型;
4.根据权利要求3所述的测量装置,其特征在于,所述处理器根据所述第一摄像头和所述第二摄像头通过双目测距获取所述航空地面设备与所述飞机舱门之间的第一距离包括:
5.根据权利要求1所述的测量装置,其特征在于,
6.根据权利要求5所述的测量装置,其特征在于,第二测距单元包括第一传感器和第二传感器;
7.根据权利要求6所述的测量装置,其特征在于,所述处理器根据所述第一传感器和所述第二传感器测量的第二距离确定距离输出值包括:
8.根据权利要求1所述的测量装置,其特征在于,还包括:
9.一种航空地面设备,其特征在于,包括如权利要求1至8任一项所述的测量装置。
10.一种航空地面设备与飞机距离的测量方法,其特征在于,包括:
11.根据权利要求10所述的测量方法,其特征在于,所述根据所述第一距离和所述第二距离确定距离输出值,包括:
12.根据权利要求11所述的测量方法,其特征在于,所述当所述航空地面设备与所述飞机舱门的距离大于所述第二阈值且小于或等于第一阈值时,根据所述第一传感器和第二传感器测量的第二距离确定距离输出值,包括:
技术总结
本公开实施例提供了一种航空地面设备与飞机距离的测量装置、地面设备和方法,涉及飞机测距领域。该装置包括:第一测距单元,用于测量所述航空地面设备与飞机舱门之间的第一距离;第二测距单元,用于测量所述航空地面设备与所述飞机舱门之间的第二距离;处理器,用于根据所述第一距离和所述第二距离确定距离输出值;视频输出单元,用于获取包括所述飞机舱门的实时视频,将所述距离输出值叠加至所述实时视频。本公开实施例提供的装置通过不同测距方式的结合提高距离输出值的准确性,还可以直观的向操作人员显示航空地面设备与飞机的距离,有利于提高安全性。
技术研发人员:银兵,肖逸,马送军,黄亚楠
受保护的技术使用者:民航协发机场设备有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!